




【ETHERCAT控制器ET1100同步机制】:实现多设备精确同步控制

摘要
本文全面介绍了ETHERCAT技术,从基础概念到同步机制的理论基础,详细阐述了ETHERCAT通信协议的层次结构、数据帧处理机制及同步时钟和数据的原理。深入探讨了ETHERCAT控制器ET1100的同步配置方法,同步模式的选择与性能考量,并通过实践案例分析了该同步机制在多设备控制系统中的应用及同步精度的测试与优化。文章进一步讨论了ETHERCAT在复杂工业环境中的应用挑战和未来发展方向,包括新技术的引入及与行业标准的适应。本文旨在为专业人士提供关于ETHERCAT同步机制的深入理解及其在实际应用中的有效配置和优化策略。
关键字
ETHERCAT技术;同步机制;通信协议;数据帧处理;同步时钟;控制器配置
参考资源链接:ET1100 EtherCAT从站控制器用户指南:功能与规格详解
1. ETHERCAT技术概述
1.1 ETHERCAT技术简介
ETHERCAT(Ethernet for Control Automation Technology)是一种高效的工业以太网通信技术,以其优越的性能和灵活性在自动化控制领域得到了广泛的应用。其主要特点包括高数据传输速率、确定性、高同步精度和对现有网络的高兼容性。随着工业自动化和智能制造的迅猛发展,ETHERCAT技术在工厂自动化、楼宇自动化、交通控制系统等领域的应用逐渐增多。
1.2 技术优势
ETHERCAT技术的最大优势在于它的“从站处理”机制,通过在从站端直接处理数据,大大提高了数据交换的效率,减少了主站的负担。此外,ETHERCAT技术支持多种数据传输方式,如基于寄存器的通信、基于过程数据的通信等,能够满足复杂应用中的多种需求。
1.3 技术适用场景
由于ETHERCAT技术在处理速度、同步精度、成本效率方面的显著优势,它特别适合用于实时性要求高、数据交换量大的场合,例如高速包装机、机器人控制系统、复杂的运动控制系统等。随着工业4.0概念的深入,ETHERCAT技术将成为智能制造的重要技术支柱之一。
2. ETHERCAT同步机制理论基础
2.1 ETHERCAT通信协议简介
2.1.1 ETHERCAT协议的层次结构
Ethernet for Control Automation Technology (ETHERCAT) 是一种用于工业自动化设备的通信协议,它基于标准的以太网技术,但具有优化的数据处理方式以满足实时控制的需求。ETHERCAT 的层次结构可以分为三个主要部分:
- 物理层:使用标准以太网接口,支持 IEEE 802.3 标准。ETHERCAT 可以通过双绞线、光纤等多种物理介质进行数据传输。
- 数据链路层:特别设计用于高效率的数据传输,支持数据的突发传输模式。
- 应用层:定义了 ETHERCAT 设备描述文件(EDS)和扩展的同步过程(ESOP),允许与 PLC 和分布式控制器的无缝集成。
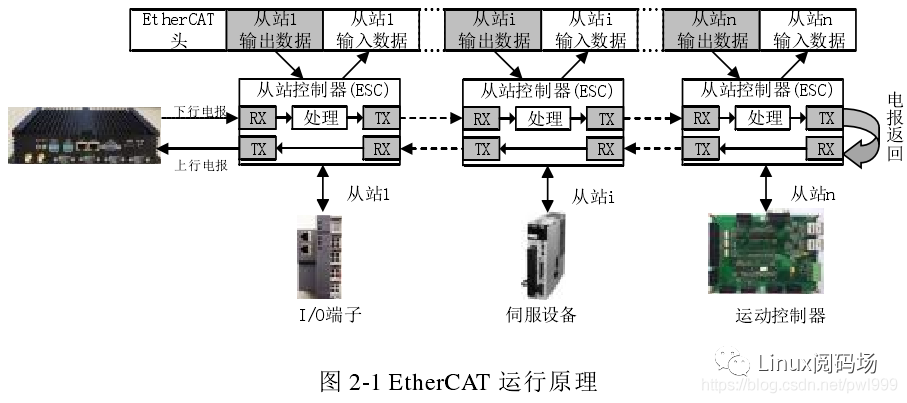
2.1.2 ETHERCAT的数据帧处理机制
ETHERCAT 的数据帧处理机制极大地提高了实时性和效率。它使用“帧突发”技术,在一个以太网帧中包含多个控制帧,每个控制帧都针对一个特定的从站设备。主站设备启动数据交换,通过单个以太网帧发送读写命令到所有从站,每个从站则在帧通过时提取、插入或修改自己的数据。这种机制避免了在每个从站中复制数据帧,显著降低了通信延迟。
2.2 ETHERCAT同步的原理
2.2.1 同步时钟的来源和结构
ETHERCAT 系统中同步时钟的来源可以是主站设备或特定的同步时钟设备,如 IEEE 1588 Precision Time Protocol (PTP) 主时钟。同步时钟的主要结构包括:
- 频率同步:确保所有从站设备在同一个频率上运行。
- 时间同步:所有从站设备在精确到微秒的时间点上执行操作。
2.2.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
相关推荐
 百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
平稳过渡策略:MXM ELECTROMECHANICAL SPEC 3.0的兼容性关键点
PyCharm高级性能定制:专为高级用户打造的优化方案
网络编程新手指南:C语言打造客户端与服务器
【系统测试全面指南】:确保救助网站可靠性与稳定性的方法
【制导系统的仿真与测试】:确保精确打击的理论与实践
【C#编程宝典】:DataGridView的EditingControlShowing事件与数据绑定的完美结合
汇编语言性能优化秘籍:《IBM-PC汇编语言程序设计》答案提升性能技巧
深度学习与最小二乘法:系统辨识新视角
【TensorRT加速攻略】:揭秘深度学习推理速度提升的秘诀
【Origin图形操作艺术】:优化数据展示的坐标系统调整技巧


专栏目录

文章持续更新中,敬请期待~
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )





















