MATLAB交互式仿真设计:单摆模型的图形用户界面探索
发布时间: 2025-01-10 08:01:18 阅读量: 2 订阅数: 8 

基于hadoop的百度云盘源代码(亲测可用完整项目代码)
# 摘要
本文全面阐述了MATLAB在交互式仿真设计中的应用,特别关注单摆模型的数学原理、仿真理论及实践操作。文章首先介绍了单摆模型的物理基础和动力学方程,随后深入探讨了在MATLAB环境下使用数值仿真方法,包括常微分方程求解器和仿真步骤。通过建立单摆仿真模型、实现图形化表示和交互式扩展,文章强调了仿真设计的理论依据,如仿真精度、稳定性和参数选择。进一步,本文详细介绍了单摆模型图形用户界面的设计与实现,包括GUI的设计工具、界面布局和功能实现。最后,文章通过案例研究,分析仿真结果并展望仿真设计在其他领域的应用前景,如机械振动和机器人运动规划。
# 关键字
MATLAB仿真;单摆模型;数值分析;图形用户界面;参数敏感性;应用展望
参考资源链接:[matlab模拟单摆动力学:从周期到混沌](https://wenku.csdn.net/doc/6412b549be7fbd1778d429e2?spm=1055.2635.3001.10343)
# 1. MATLAB交互式仿真设计基础
在这一章节中,我们将对MATLAB(Matrix Laboratory)的交互式仿真设计进行基础性的介绍。MATLAB是一种高性能的数值计算环境和第四代编程语言,它在工程仿真领域扮演着至关重要的角色。我们将从最简单的入门点开始,逐步深入到如何设计出一个完整的交互式仿真环境。
首先,我们介绍MATLAB的基础知识,包括它的安装、用户界面布局以及一些常用的命令和功能。通过案例讲解如何进行基本的数值计算、数据分析以及可视化展示,为后续章节打下坚实的基础。
接着,本章节着重解释了交互式仿真的概念和意义。仿真本身是一种实验技术,它允许我们在模型中模拟现实世界的物理现象,以研究和预测系统的行为。交互式仿真更进一步,允许用户通过图形用户界面(GUI)进行实时操作和参数调整,从而观察结果的变化。这种方式不仅提高了仿真的用户体验,而且极大地增强了仿真结果的可分析性和应用价值。
本章最后,我们将展示如何在MATLAB中创建简单的交互式仿真,包括编写脚本和函数,以及如何使用MATLAB的内置工具来创建用户界面。这为理解后续章节中复杂的仿真模型和GUI设计打下坚实的基础。
通过本章节的学习,读者应能掌握MATLAB的基本操作,对交互式仿真有一个基本的理解,并能够开始在MATLAB环境中构建简单的仿真环境。
# 2. 单摆模型的数学原理和仿真理论
## 2.1 单摆模型的物理基础
单摆,作为经典物理中的一个理想模型,由一个质点和一个固定点通过一根不可伸缩的轻绳连接构成。质点仅在重力作用下在垂直平面内作往复运动。在研究单摆的动态行为时,我们需先了解它的基本物理原理。
### 2.1.1 单摆动力学方程
在理想情况下,忽略空气阻力和绳子的质量,单摆的运动可用简谐振子模型来描述。单摆的角位移θ、角速度ω和角加速度α之间的关系可通过牛顿第二定律建立:
\[ m \frac{d^2\theta}{dt^2} = -mg\sin(\theta) \]
其中,m表示摆球的质量,g表示重力加速度。这个方程说明,单摆的运动由重力驱动,绳子的拉力和摆球的向心力提供恢复力。
### 2.1.2 单摆的能量守恒
能量守恒定律在单摆模型中同样适用。单摆系统的总能量是动能和势能之和,表示为:
\[ E = T + V = \frac{1}{2}m l^2 \omega^2 + mgl(1 - \cos\theta) \]
其中,E表示总能量,T和V分别代表动能和势能,l是摆长。当单摆运动不考虑阻力时,系统的总能量在摆动过程中保持不变。
## 2.2 MATLAB中的数值仿真方法
单摆的运动方程在某些条件下无法解析求解,需要借助数值仿真进行分析。MATLAB提供了一整套科学计算工具和函数,使得在单摆模型的数值仿真上成为可能。
### 2.2.1 常微分方程求解器介绍
MATLAB提供了如ode45、ode23等函数,它们是基于Runge-Kutta方法的常微分方程求解器,适用于求解非刚性问题。ode45是其中最为常用的一个,它自动调整步长以平衡求解精度和计算效率。
### 2.2.2 MATLAB数值仿真步骤
使用MATLAB进行单摆模型的数值仿真大致可以分为以下几个步骤:
1. 定义单摆系统的参数,例如摆长、摆球质量等。
2. 编写描述单摆运动的微分方程。
3. 选择合适的求解器,并设置求解器的参数,如初始条件和求解时间区间。
4. 调用求解器函数求解微分方程。
5. 分析仿真结果,并可视化。
```matlab
function single_pendulum_simulation
% 参数设置
l = 1; % 摆长,单位m
m = 0.1; % 摆球质量,单位kg
g = 9.81; % 重力加速度,单位m/s^2
% 初始条件
theta_0 = pi/4; % 初始角度,单位rad
omega_0 = 0; % 初始角速度,单位rad/s
% 时间参数
tspan = [0 10]; % 时间区间,从0到10秒
% 调用ode45求解器
[t, sol] = ode45(@(t, y) single_pendulum_ode(t, y, l, m, g), tspan, [theta_0; omega_0]);
% 结果绘图
plot(t, sol(:,1));
title('Single Pendulum Angle vs Time');
xlabel('Time (s)');
ylabel('Angle (rad)');
end
function dydt = single_pendulum_ode(t, y, l, m, g)
% y(1) 是角度 theta, y(2) 是角速度 omega
dydt = [y(2); -(g/l)*sin(y(1))];
end
```
上述MATLAB代码首先定义了单摆参数和初始条件,接着调用ode45函数求解单摆的动态方程,并最终绘制出角度随时间变化的曲线。
## 2.3 单摆模型仿真设计的理论依据
在进行单摆模型仿真时,除了仿真工具和技术的选择外,仿真精度、稳定性以及系统响应的分析和参数选择也是至关重要的。
### 2.3.1 仿真精度和稳定性分析
仿真精度与仿真器求解微分方程时的步长选择密切相关,步长越小仿真精度越高,但也会导致计算量增大。稳定性则是指仿真过程中数值解不会产生过大偏差的特性。通常,选择一个合适的求解器以及适当的误差容限,可以平衡这两个要求。
### 2.3.2 参数选择和系统响应
在仿真开始前,需要对系统参数进行合理的选择。参数的不同会直接影响到系统的动态行为,例如摆长和质量的不同会导致不同的振动周期。通过对系统响应的分析,可以确定对系统行为敏感的参数,并据此调整仿真策略。
通过本章节的介绍,我们了解了单摆模型的物理基础,数值仿真方法的重要性,并且通过一个简单的MATLAB实例,我们展示了如何将理论应用于实践。在下一章节中,我们将进一步深入MATLAB环境,详细构建单摆仿真模型,实现更复杂的动态行为仿真。
# 3. 单摆模型的MATLAB仿真实践
## 3.1 单摆仿真模型的建立
### 3.1.1 MATLAB编程环境准备
在开始编写单摆仿真模型之前,确保已经安装了最新版本的MATLAB。MATLAB为工程师和科研人员提供了一个强大的交互式数学建模环境,可以进行算法开发、数据可视化、数据分析和数值计算。为了编写单摆模型,我们主要用到的是MATLAB的脚本编写功能和Simulink仿真环境。
首先,打开MATLAB软件,界面中会显示MATLAB命令窗口,以及编辑器、工作空间、路径等标签页。在命令窗口中输入`edit filename.m`来创建一个新的脚本文件,其中`filename`为你的文件名,例如`pendulum_simulation.m`。
在编写代码之前,确保MATLAB的路径设置中包含所有需要调用的函数和工具箱。可以通过`addpath`函数添加自定义的脚本文件夹到MATLAB路径中,以保证在任何位置都能调用相应的文件。
### 3.1.2 单摆模型的MATLAB代码实现
单摆模型可以使用二阶常微分方程来描述。在MATLAB中,我们可以使用内置的数值解算器,如`ode45`,来求解该微分方程。以下是一个基本的单摆模型仿真实现的MATLAB代码示例:
```matlab
function pendulum_simulation()
% 定义仿真时间范围
tspan = [0, 10]; % 从0到10秒
% 初始条件 [theta, omega]
initial_conditions = [pi/4, 0]; % 初始角度为π/4,初始角速度为0
% 使用ode45求解常微分方程
[t, y] = ode45(@(t, y) pendulum_eq(t, y), tspan, initial_conditions);
% 绘制结果
figure;
plot(t, y(:,1), 'b'); % theta随时间变化
xlabel('Time (s)');
ylabel('Angle (rad)');
title('Single Pendulum Simulation');
grid on;
end
function dydt = pendulum_eq(t, y)
% 单摆的常微分方程
g = 9.81; % 重力加速度
L = 1; % 单摆的长度
dydt = zeros(2,1); % 初始化导数向量
dydt(1) = y(2); % 角度的导数即角速度
dydt(2) = -(g/L)*sin(y(1)); % 角速度的导数由重力和长度决定
end
```
在这段代码中,`pendulum_simulation`函数初始化仿真条件并调用`ode45`求解器,`pendulum_eq`函数定义了单摆运动的微分方程。`ode45`是一个基于Runge-Kutta方法的求解器,适用于求解非刚性常微分方程。它返回两个数组,分别是时间向量`t`和对应的解向量`y`,其中`y`的第一列代表角度,第二列代表角速度。
解向量`y`的每一行对应于时

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了如何使用 MATLAB 求解单摆模型,这是一个经典的物理问题。它涵盖了各种主题,包括数值分析、动力学模拟、参数敏感性分析、微分方程求解和符号计算。通过一系列深入的文章,专栏提供了从理论基础到实际应用的全面指南,包括如何使用 MATLAB 进行单摆模型的仿真、分析和可视化。它还介绍了高级技术,如交互式仿真设计和多周期模拟,以增强对单摆模型的理解和洞察力。该专栏旨在为学生、研究人员和工程师提供一个宝贵的资源,帮助他们使用 MATLAB 有效地解决单摆模型和更广泛的物理问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
运动模型实战:提升计算效率的7大优化策略
# 摘要
运动模型在计算机科学与工程领域中扮演着关键角色,其计算效率直接影响到模型的性能和实用性。本文首先阐述了运动模型的理论基础,探讨了理论框架、模型分类以及数学与物理意义。随后,本文重点分析了计算效率的重要性和优化策略,包括算法选择、数据结构、时间复杂度和空间复杂度的优化。通过并行计算和分布式系统,算法改进与模型简化,以及数据管理和缓存优化的实践方法,本文
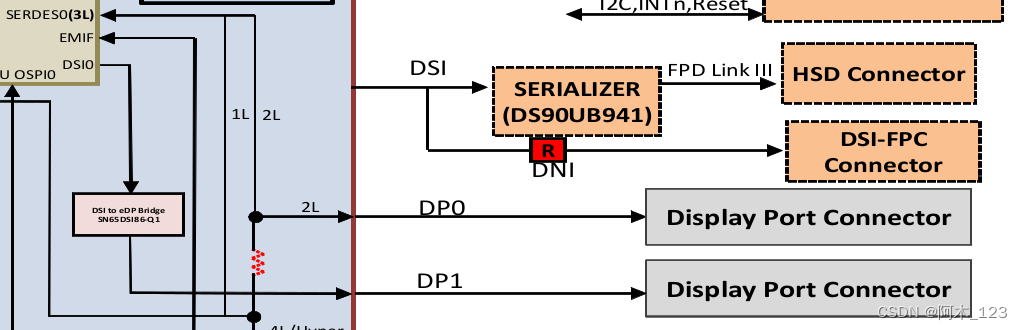
嵌入式系统中的MDSS-DSI-Panel集成:顶级工程师的调试与案例分析
# 摘要
本文全面解析了MDSS-DSI-Panel的集成概念,详细探讨了硬件接口与通信协议的关键要素,包括MDSS组件、DSI接口标准、Panel接口类型及选择标准,以及DSI协议的工作模式、帧结构和数据传输优化。文章还深入研究了软件配置,涵盖了驱动层配置优化和应用层接口实现。通过嵌入式系统中实践案例的分析,本文提供故障排除与维护的策略,并展望了MDSS-DSI-Panel集成技
【Avantage平台:5分钟快速启动新手项目指南】:别让项目启动拖沓!

# 摘要
本文旨在为初学者提供一个全面的Avantage平台入门指南。首先概述了Avantage平台的核心概念和基础使用,接着详细介绍了新手项目准备、环境搭建和快速启动项目的步骤。文中也对项目的核心功能、代码结构和编写规范进行了解读,并提供了问题定位与调试的实用方法。此外,本文还探讨了项目扩展、性能优化、安全加固和定期维护等高级话题。最后,本文通过分析社区资源与用户支持
浏览器版本管理的艺术:Chromedriver最佳实践

# 摘要
本文对Chromedriver及其在Selenium自动化测试中的应用进行了全面介绍。首先概述了浏览器自动化的基本概念,随后详细解读了Selenium框架与WebDriver的集成机制,并重点阐述了Chromedriver的作用、特点以及与Chrome浏览器的交互方式。接
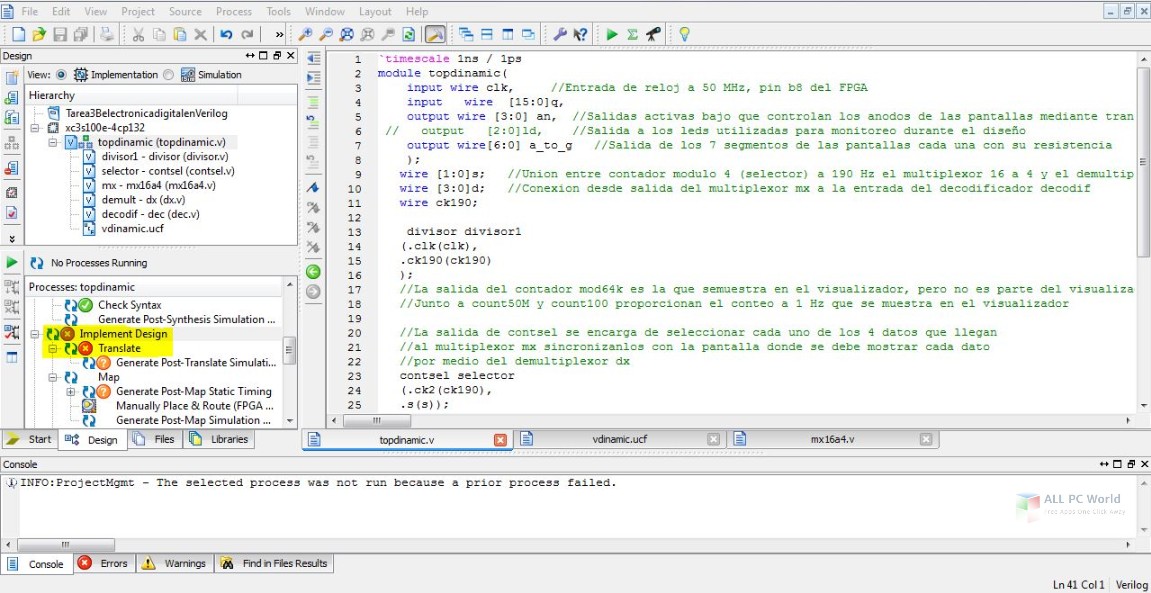
ISE 14.7深度优化:高级技巧助你提升性能
# 摘要
本文系统介绍了ISE 14.7软件在FPGA设计与开发中的应用,重点探讨了其性能优化的核心技术和策略。首先,本文概述了ISE 14.7的基本性能以及项目管理和代码优化的基础知识,强调了设计原则和资源管理的重要性。随后,深入分析了高级性能优化策略,包括高级综合特性、处理器及IP核优化,以及硬件调试与性能验证的高级技巧。通过具体案例分析,文章
【A6电机性能优化】:掌握9个关键参数设定技巧,让你的电机运行无忧

# 摘要
A6电机作为一款高效节能的电机产品,其性能优化和智能化管理是当前研究的热点。本文首先概述了A6电机的基本特点,接着详细解析了影响其性能的关键参数,包括效率、功率因素以及负载能力的优化调整。针对电机运行中产生的热管理问题,本文探讨了温升控制、散热系统设计以及维护和寿命预测的有效方法。在电机控制方面,本文着重介绍了变频技术的应用和电机智能化管理的优势,以及远程监控技术的进步。通过性能
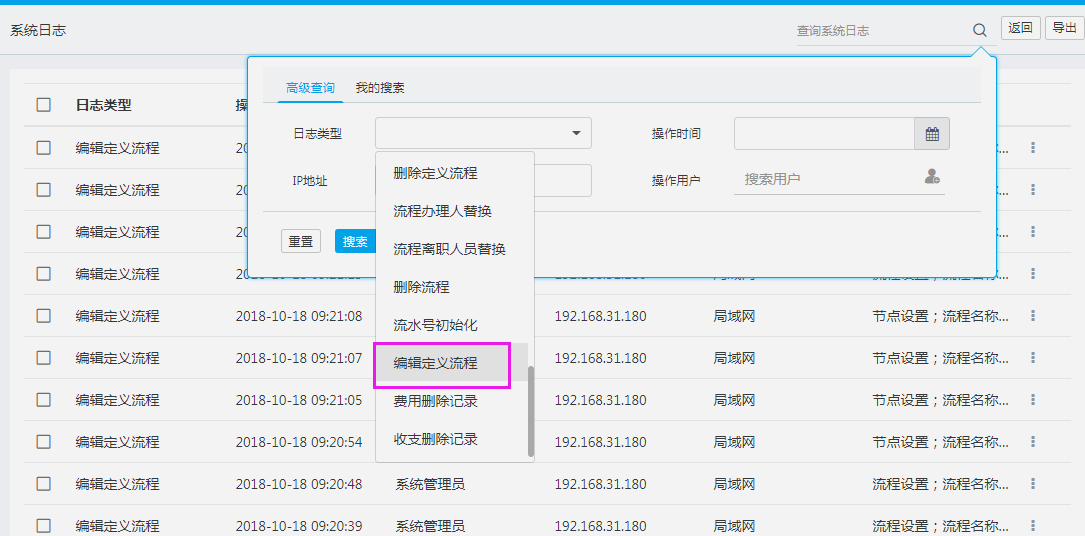
【泛微OA流程表单开发】:13个秘籍让你从新手到高手
# 摘要
泛微OA流程表单开发是企业信息化管理的重要组成部分,本文详细介绍了流程表单开发的基础设置、实践技巧、调试优化及高级应用。从基础的表单设计到复杂流程的实现,再到与其他系统的集成,本文提供了一系列操作指南和高级定制功能。同时,文章也强调了在开发过程中对于权限和数据安全的重视,以及在流程表单优化中提升用户体验和处理效率的策略。最后,展望了人工智能技术在流程表单中的潜在
【性能优化专家】:宿舍管理系统效率提升的十大关键点

# 摘要
本文综合分析了宿舍管理系统的性能优化方法,涉及数据库性能调优、应用层代码优化、网络与硬件层面的性能调整等多个方面。通过数据库设计优化、SQ
【ADAMS坐标系调整实战】:理论到实践的详细操作指南

# 摘要
本论文深入探讨了ADAMS软件中坐标系的基础概念、理论知识与类型,并详细阐述了坐标系在建模、运动分析和结果输出中的应用。此外,本文介绍了坐标系调整的实战技巧,包括基于ADAMS的命令操作和图形用户界面的使用方法,以及针对特定几何特征的坐标系对齐与定位技巧。论文还分析了动态仿真、复杂模型和多体系统中坐标系调整的高级应用案例,并探讨了自动化、智能化调整技术的发展趋势。最后,
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )