【STM32串口通信101】:从入门到精通,解锁串口通信的奥秘
发布时间: 2024-07-02 17:46:49 阅读量: 92 订阅数: 76 

什么是stm32串口通信入门以及学习的意义
# 1. STM32串口通信概述**
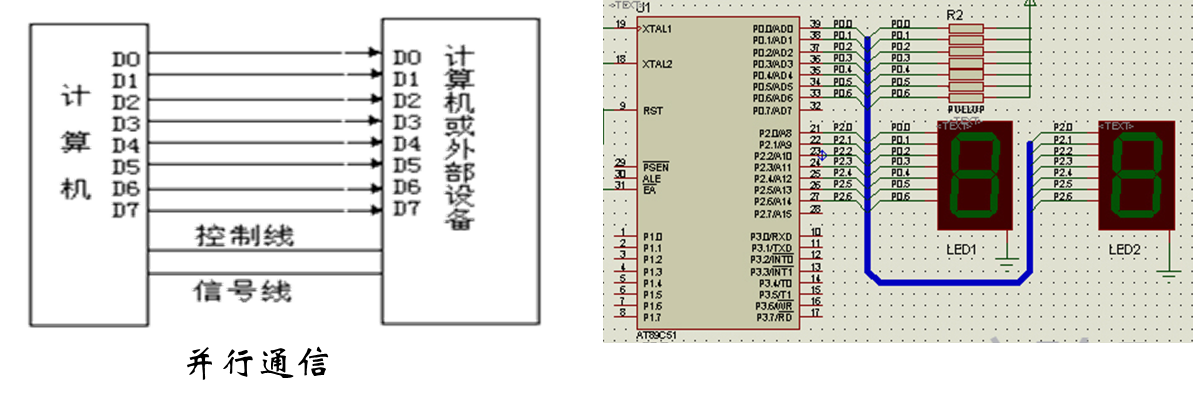
STM32串口通信是一种异步串行通信方式,广泛应用于嵌入式系统中。它允许STM32微控制器与外部设备(如传感器、显示器、PC)进行数据交换。串口通信基于串行数据传输原理,一次传输一位数据,并遵循特定的通信协议,如UART、USART或RS-232。STM32微控制器配备了专用的串口外设,提供灵活的配置选项,包括波特率、数据位、停止位和奇偶校验。
# 2. 串口通信理论基础**
**2.1 串口通信原理**
串口通信是一种异步串行通信方式,它将数据逐位传输,无需时钟信号同步。
**2.1.1 串行数据传输**
串行数据传输是指数据以一位一位的形式传输,而不是同时传输多个位。每个数据位在传输时都会被附加一个起始位和一个停止位,以标记数据帧的开始和结束。
**2.1.2 串口通信协议**
串口通信协议定义了数据传输的格式和规则,包括:
- **波特率:**数据传输速率,单位为比特/秒。
- **数据位:**每个数据帧中传输的数据位数,通常为 5、6、7 或 8 位。
- **校验位:**用于检测数据传输错误的附加位,可以是奇校验或偶校验。
- **停止位:**数据帧结束时的停止位数,通常为 1 或 2 位。
**2.2 STM32串口硬件结构**
STM32微控制器具有专门的串口外设,用于处理串口通信。
**2.2.1 串口寄存器**
串口外设包含多个寄存器,用于配置和控制串口通信。这些寄存器包括:
- **数据寄存器:**用于发送和接收数据。
- **控制寄存器:**用于配置串口参数,如波特率、数据位和校验位。
- **状态寄存器:**指示串口的状态,如数据就绪、发送完成或接收完成。
**2.2.2 中断处理**
串口外设支持中断处理,当数据发送或接收完成时会触发中断。中断处理程序可以从应用程序中定义,以响应串口事件。
**代码示例:**
```c
// 初始化串口
void USART_Init(USART_TypeDef *USARTx) {
// 配置波特率
USARTx->BRR = (SystemCoreClock / 115200) / 16;
// 配置数据位、校验位和停止位
USARTx->CR1 = USART_CR1_TE | USART_CR1_RE | USART_CR1_8M | USART_CR1_PCE;
// 使能串口
USARTx->CR1 |= USART_CR1_UE;
}
```
**代码逻辑分析:**
- `USART_Init()` 函数用于初始化串口外设。
- `USARTx->BRR` 寄存器用于配置波特率,将其设置为 115200 bps。
- `USARTx->CR1` 寄存器用于配置数据位(8 位)、校验位(奇校验)和停止位(1 位)。
- `USARTx->CR1 |= USART_CR1_UE;` 语句使能串口。
**表格:STM32串口寄存器**
| 寄存器 | 描述 |
|---|---|
| DR | 数据寄存器 |
| BRR | 波特率寄存器 |
| CR1 | 控制寄存器 1 |
| CR2 | 控制寄存器 2 |
| SR | 状态寄存器 |
**Mermaid流程图:串口通信流程**
```mermaid
sequenceDiagram
participant Sender
participant Receiver
Sender->Receiver: Send start bit
Receiver->Sender: Wait for start bit
Sender->Receiver: Send data bits
Receiver->Sender: Wait for data bits
Sender->Receiver: Send stop bit
Receiver->Sender: Wait for stop bit
Receiver->Receiver: Process data
```
# 3. 串口通信编程实践**
### 3.1 串口初始化和配置
#### 3.1.1 初始化串口外设
STM32的串口初始化涉及配置串口寄存器。以下代码段展示了如何初始化USART1:
```c
// 初始化 USART1
RCC->APB2ENR |= RCC_APB2ENR_USART1EN; // 使能 USART1 时钟
USART1->CR1 = 0; // 复位 USART1 控制寄存器 1
USART1->BRR = (uint32_t)9600; // 设置波特率为 9600
USART1->CR1 |= USART_CR1_TE | USART_CR1_RE; // 启用发送器和接收器
```
**代码逻辑分析:**
* 首先,通过设置 RCC->APB2ENR 寄存器中的 USART1EN 位,使能 USART1 时钟。
* 然后,复位 USART1->CR1 寄存器,清除之前的配置。
* 设置 USART1->BRR 寄存器为 9600,以设置波特率为 9600。
* 最后,通过设置 USART1->CR1 寄存器中的 TE 和 RE 位,启用发送器和接收器。
#### 3.1.2 配置串口参数
串口参数包括波特率、数据位、停止位和奇偶校验。以下代码段展示了如何配置串口参数:
```c
// 配置 USART1 参数
USART1->CR2 = (USART_CR2_STOP1_0 | USART_CR2_CLKEN | USART_CR2_CPOL | USART_CR2_CPHA); // 设置停止位、时钟极性和相位
USART1->CR1 |= (USART_CR1_M | USART_CR1_PCE | USART_CR1_PS); // 设置数据位、奇偶校验和校验位
```
**代码逻辑分析:**
* 设置 USART1->CR2 寄存器中的 STOP1_0 位,选择 1 个停止位。
* 设置 CLKEN 位,启用时钟输出。
* 设置 CPOL 和 CPHA 位,配置时钟极性和相位。
* 设置 USART1->CR1 寄存器中的 M 位,选择 8 位数据位。
* 设置 PCE 位,启用奇偶校验。
* 设置 PS 位,选择偶校验。
### 3.2 数据发送和接收
#### 3.2.1 数据发送操作
要发送数据,可以使用 USART1->DR 寄存器。以下代码段展示了如何发送字符 'A':
```c
// 发送字符 'A'
USART1->DR = 'A';
while ((USART1->SR & USART_SR_TC) == 0); // 等待传输完成
```
**代码逻辑分析:**
* 将字符 'A' 写入 USART1->DR 寄存器,开始发送。
* 等待 USART1->SR 寄存器中的 TC 位被置位,表示传输已完成。
#### 3.2.2 数据接收操作
要接收数据,可以使用 USART1->DR 寄存器。以下代码段展示了如何接收字符:
```c
// 接收字符
while ((USART1->SR & USART_SR_RXNE) == 0); // 等待接收完成
char received_char = USART1->DR; // 读取接收到的字符
```
**代码逻辑分析:**
* 等待 USART1->SR 寄存器中的 RXNE 位被置位,表示已接收到字符。
* 读取 USART1->DR 寄存器,获取接收到的字符。
### 3.3 中断处理和数据缓冲
串口中断可以用于处理数据发送和接收。以下代码段展示了如何配置 USART1 中断:
```c
// 配置 USART1 中断
NVIC_EnableIRQ(USART1_IRQn); // 使能 USART1 中断
USART1->CR1 |= USART_CR1_RXNEIE; // 启用接收中断
```
**代码逻辑分析:**
* 调用 NVIC_EnableIRQ() 函数,使能 USART1 中断。
* 设置 USART1->CR1 寄存器中的 RXNEIE 位,启用接收中断。
# 4. 串口通信高级应用
### 4.1 DMA传输
#### 4.1.1 DMA简介
直接存储器访问(DMA)是一种硬件机制,允许外设直接与存储器进行数据传输,而无需CPU干预。这可以显著提高数据传输速度,特别是在大数据量传输的情况下。
#### 4.1.2 DMA配置和使用
**DMA配置步骤:**
1. **选择DMA通道:**根据外设选择相应的DMA通道。
2. **配置DMA源和目标地址:**指定数据源和目标存储器地址。
3. **设置传输大小:**指定要传输的数据量。
4. **配置DMA控制寄存器:**设置传输方向、中断使能等参数。
**DMA使用步骤:**
1. **初始化DMA:**调用DMA初始化函数,配置DMA参数。
2. **启动DMA传输:**调用DMA启动函数,开始数据传输。
3. **等待DMA传输完成:**通过轮询DMA状态寄存器或中断方式判断传输是否完成。
**代码示例:**
```c
// 初始化DMA
DMA_InitTypeDef DMA_InitStruct;
DMA_InitStruct.Channel = DMA_CHANNEL_1;
DMA_InitStruct.Direction = DMA_MEMORY_TO_PERIPHERAL;
DMA_InitStruct.PeriphAddr = (uint32_t)&USART1->DR;
DMA_InitStruct.MemAddr = (uint32_t)data_buffer;
DMA_InitStruct.BufferSize = data_size;
DMA_Init(DMA1_Channel1, &DMA_InitStruct);
// 启动DMA传输
DMA_Cmd(DMA1_Channel1, ENABLE);
// 等待DMA传输完成
while (DMA_GetFlagStatus(DMA1_FLAG_TC1) == RESET);
```
### 4.2 多串口通信
#### 4.2.1 多串口配置
STM32微控制器通常有多个串口外设。要实现多串口通信,需要分别配置每个串口:
1. **初始化串口外设:**调用串口初始化函数,配置串口参数。
2. **配置中断:**为每个串口启用中断,以便在数据接收时触发中断处理。
#### 4.2.2 多串口通信管理
管理多个串口时,需要考虑以下因素:
* **中断优先级:**设置不同串口中断的优先级,以确保重要串口优先处理。
* **数据缓冲:**为每个串口分配独立的数据缓冲区,以避免数据冲突。
* **同步机制:**如果多个串口需要同时进行操作,则需要实现同步机制,例如互斥锁。
### 4.3 串口通信协议实现
#### 4.3.1 Modbus协议
Modbus是一种广泛用于工业自动化领域的通信协议。它使用主从模式,主设备轮询从设备获取或设置数据。
**Modbus实现步骤:**
1. **配置串口:**按照Modbus协议要求配置串口参数。
2. **实现Modbus命令:**实现Modbus协议中定义的各种命令,如读寄存器、写寄存器等。
3. **处理Modbus响应:**解析Modbus响应消息,提取所需数据。
#### 4.3.2 CAN总线协议
CAN总线是一种用于汽车和工业自动化领域的串行通信协议。它采用广播方式,所有节点都可以接收到所有消息。
**CAN总线实现步骤:**
1. **配置CAN控制器:**初始化CAN控制器,设置波特率、滤波器等参数。
2. **发送CAN消息:**使用CAN发送函数发送CAN消息。
3. **接收CAN消息:**使用CAN接收函数接收CAN消息,并解析消息内容。
# 5. 串口通信故障排除
### 5.1 常见问题和解决方案
**5.1.1 串口无法通信**
- **原因:**串口引脚未正确连接或配置。
- **解决方案:**检查串口引脚的连接,确保它们正确连接到外部设备。验证串口引脚的配置,例如波特率、数据位、停止位和奇偶校验。
- **原因:**串口外设未正确初始化。
- **解决方案:**检查串口外设的初始化代码,确保正确配置了串口寄存器和中断。
- **原因:**外部设备未正确配置。
- **解决方案:**检查外部设备的配置,确保它与串口通信参数兼容。
**5.1.2 数据传输错误**
- **原因:**波特率不匹配。
- **解决方案:**确保串口两端的波特率设置相同。
- **原因:**数据位、停止位或奇偶校验不匹配。
- **解决方案:**验证串口两端的串口参数设置是否一致。
- **原因:**数据缓冲区溢出。
- **解决方案:**增加数据缓冲区的大小或优化数据发送和接收操作,以避免缓冲区溢出。
- **原因:**串口中断处理不当。
- **解决方案:**检查串口中断处理代码,确保中断处理程序正确处理数据并防止数据丢失。
### 5.2 调试和测试技巧
**5.2.1 串口调试工具**
- **逻辑分析仪:**用于分析串口信号,检查数据传输和接收。
- **串口调试器:**用于发送和接收数据,并监控串口通信。
- **串口仿真器:**用于模拟串口设备,方便测试和调试。
**5.2.2 测试用例和验证**
- **发送和接收测试:**发送和接收已知数据,验证数据传输的正确性。
- **边界测试:**发送和接收不同长度和类型的数据,测试串口处理不同数据情况的能力。
- **压力测试:**发送和接收大量数据,测试串口在高负载下的性能。
- **异常处理测试:**模拟串口错误或异常情况,测试串口故障处理机制。
# 6. 串口通信扩展应用**
**6.1 物联网应用**
**6.1.1 串口与无线通信模块**
STM32串口可与无线通信模块(如Wi-Fi、蓝牙、LoRa)连接,实现物联网设备与云平台或其他设备之间的通信。
* **代码示例:**
```c
#include "stm32f1xx_hal.h"
#include "wifi_module.h"
// 初始化Wi-Fi模块
void wifi_init(void) {
// 配置串口参数
HAL_UART_Init(&huart1);
// 初始化Wi-Fi模块
wifi_module_init(&huart1);
}
// 发送数据到Wi-Fi模块
void wifi_send_data(uint8_t *data, uint16_t len) {
HAL_UART_Transmit(&huart1, data, len, 1000);
}
// 接收数据从Wi-Fi模块
void wifi_receive_data(uint8_t *data, uint16_t len) {
HAL_UART_Receive(&huart1, data, len, 1000);
}
```
* **参数说明:**
| 参数 | 说明 |
|---|---|
| huart1 | 串口句柄 |
| data | 数据缓冲区 |
| len | 数据长度 |
**6.1.2 串口数据采集和传输**
STM32串口可连接传感器或其他设备,采集数据并通过无线通信模块传输到云平台或其他设备。
* **代码示例:**
```c
#include "stm32f1xx_hal.h"
#include "sensor.h"
#include "wifi_module.h"
// 初始化传感器和Wi-Fi模块
void init_system(void) {
// 初始化传感器
sensor_init();
// 初始化Wi-Fi模块
wifi_init();
}
// 定时采集数据并发送到Wi-Fi模块
void data_acquisition(void) {
while (1) {
// 采集传感器数据
uint16_t data = sensor_read();
// 发送数据到Wi-Fi模块
wifi_send_data((uint8_t *)&data, sizeof(data));
// 等待一段时间再采集下一次数据
HAL_Delay(1000);
}
}
```
* **参数说明:**
| 参数 | 说明 |
|---|---|
| sensor_read | 传感器读取函数 |
| data | 传感器数据 |
| sizeof(data) | 传感器数据大小 |

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 单片机串口通信的方方面面,从入门基础到高级应用,涵盖了串口中断、DMA 传输、协议解析、故障排查、波特率配置、数据格式配置、流控制、多主从通信、高级应用、外设协同、性能优化、安全措施、协议设计、调试技巧、常见问题、最佳实践、案例分析以及物联网和人工智能领域的应用。通过一系列循序渐进的教程和深入的分析,本专栏旨在帮助读者掌握 STM32 串口通信的精髓,解锁其在各种应用中的强大潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
扇形菜单高级应用

# 摘要
扇形菜单作为一种创新的用户界面设计方式,近年来在多个应用领域中显示出其独特优势。本文概述了扇形菜单设计的基本概念和理论基础,深入探讨了其用户交互设计原则和布局算法,并介绍了其在移动端、Web应用和数据可视化中的应用案例
C++ Builder高级特性揭秘:探索模板、STL与泛型编程

# 摘要
本文系统性地介绍了C++ Builder的开发环境设置、模板编程、标准模板库(STL)以及泛型编程的实践与技巧。首先,文章提供了C++ Builder的简介和开发环境的配置指导。接着,深入探讨了C++模板编程的基础知识和高级特性,包括模板的特化、非类型模板参数以及模板
【深入PID调节器】:掌握自动控制原理,实现系统性能最大化

# 摘要
PID调节器是一种广泛应用于工业控制系统中的反馈控制器,它通过比例(P)、积分(I)和微分(D)三种控制作用的组合来调节系统的输出,以实现对被控对象的精确控制。本文详细阐述了PID调节器的概念、组成以及工作原理,并深入探讨了PID参数调整的多种方法和技巧。通过应用实例分析,本文展示了PID调节器在工业过程控制中的实际应用,并讨
【Delphi进阶高手】:动态更新百分比进度条的5个最佳实践

# 摘要
本文针对动态更新进度条在软件开发中的应用进行了深入研究。首先,概述了进度条的基础知识,然后详细分析了在Delphi环境下进度条组件的实现原理、动态更新机制以及多线程同步技术。进一步,文章探讨了数据处理、用户界面响应性优化和状态视觉呈现的实践技巧,并提出了进度
【TongWeb7架构深度剖析】:架构原理与组件功能全面详解
# 摘要
TongWeb7作为一个复杂的网络应用服务器,其架构设计、核心组件解析、性能优化、安全性机制以及扩展性讨论是本文的主要内容。本文首先对TongWeb7的架构进行了概述,然后详细分析了其核心中间件组件的功能与特点,接着探讨了如何优化性能监控与分析、负载均衡、缓存策略等方面,以及安全性机制中的认证授权、数据加密和安全策略实施。最后,本文展望
【S参数秘籍解锁】:掌握驻波比与S参数的终极关系
# 摘要
本论文详细阐述了驻波比与S参数的基础理论及其在微波网络中的应用,深入解析了S参数的物理意义、特性、计算方法以及在电路设计中的实践应用。通过分析S参数矩阵的构建原理、测量技术及仿真验证,探讨了S参数在放大器、滤波器设计及阻抗匹配中的重要性。同时,本文还介绍了驻波比的测量、优化策略及其与S参数的互动关系。最后,论文探讨了S参数分析工具的使用、高级分析技巧,并展望
【嵌入式系统功耗优化】:JESD209-5B的终极应用技巧
# 摘要
本文首先概述了嵌入式系统功耗优化的基本情况,随后深入解析了JESD209-5B标准,重点探讨了该标准的框架、核心规范、低功耗技术及实现细节。接着,本文奠定了功耗优化的理论基础,包括功耗的来源、分类、测量技术以及系统级功耗优化理论。进一步,本文通过实践案例深入分析了针对JESD209-5B标准的硬件和软件优化实践,以及不同应用场景下的功耗优化分析。最后,展望了未来嵌入式系统功耗优化的趋势,包括新兴技术的应用、JESD209-5B标准的发展以及绿色计算与可持续发展的结合,探讨了这些因素如何对未来的功耗优化技术产生影响。
# 关键字
嵌入式系统;功耗优化;JESD209-5B标准;低功耗
ODU flex接口的全面解析:如何在现代网络中最大化其潜力
# 摘要
ODU flex接口作为一种高度灵活且可扩展的光传输技术,已经成为现代网络架构优化和电信网络升级的重要组成部分。本文首先概述了ODU flex接口的基本概念和物理层特征,紧接着深入分析了其协议栈和同步机制,揭示了其在数据中心、电信网络、广域网及光纤网络中的应用优势和性能特点。文章进一步
如何最大化先锋SC-LX59的潜力
# 摘要
先锋SC-LX59作为一款高端家庭影院接收器,其在音视频性能、用户体验、网络功能和扩展性方面均展现出巨大的潜力。本文首先概述了SC-LX59的基本特点和市场潜力,随后深入探讨了其设置与配置的最佳实践,包括用户界面的个性化和音画效果的调整,连接选项与设备兼容性,以及系统性能的调校。第三章着重于先锋SC-LX59在家庭影院中的应用,特别强调了音视频极致体验、智能家居集成和流媒体服务的充分利用。在高
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )