函数指针:在C编程中实现高级的回调机制
发布时间: 2024-01-13 19:16:24 阅读量: 38 订阅数: 22 

C语言中函数回调
# 1. 引言
## 1.1 什么是函数指针
函数指针是指向函数的指针变量。在C语言中,函数是一种特殊的数据类型,它可以像其他变量一样,被赋值、传递和调用。函数指针可以用来存储函数的地址,通过函数指针可以间接地调用函数。
函数指针的声明方式如下所示:
```c
返回类型 (*指针变量名) (参数列表);
```
其中,`返回类型`表示函数的返回值类型,`(*指针变量名)`表示指针变量的声明,`参数列表`表示函数的参数类型和数量。
## 1.2 回调机制的作用及优势
回调机制是一种常用的编程技术,在很多框架和库中被广泛应用。回调机制的作用是允许程序在特定事件发生时调用预定义的函数,从而实现复杂的逻辑控制。
回调机制的主要优势在于提高了代码的灵活性和可重用性。通过回调机制,可以将某个功能的实现从主体代码中分离出来,使得代码更加模块化和可拓展。此外,回调机制还可以实现异步操作、事件处理等功能,使程序具备更强大的功能和反应能力。
# 2. 函数指针的基础知识
函数指针是C语言中重要的概念之一,它允许将函数地址赋值给指针变量,进而通过指针变量调用函数。理解函数指针的基础知识对于理解回调机制至关重要。
### 2.1 函数指针的定义
在C语言中,可以使用以下语法定义一个函数指针:
```c
return_type (*pointer_name)(parameter_list);
```
其中,`return_type`是函数的返回类型,`parameter_list`是函数的参数列表,`pointer_name`是指针变量的名称。
例如,下面是一个定义函数指针的示例:
```c
int (*sum)(int, int);
```
该定义表示创建了一个名为`sum`的函数指针,它指向一个返回类型为`int`,接受两个`int`类型参数的函数。
### 2.2 函数指针的使用方法
函数指针的使用可以分为两个步骤:赋值和调用。
首先,使用赋值语句将函数地址赋值给函数指针变量:
```c
sum = &add;
```
其中,`add`是一个函数的名称,`&add`表示该函数的地址。注意,函数名本身即是函数的地址,不需要使用取地址符号`&`。
接下来,通过函数指针变量调用函数:
```c
int result = sum(3, 5);
```
上述代码将通过函数指针`sum`调用`add`函数,并将返回值赋给`result`变量。
### 2.3 函数指针的类型
函数指针的类型与函数的返回类型和参数列表密切相关。具体来说,函数指针的类型必须与所指向的函数的类型一致。
例如,如果有一个函数`int add(int a, int b)`,那么对应的函数指针类型为`int (*)(int, int)`。
此外,函数指针还可以作为函数的参数或返回值类型,从而实现更为灵活的函数调用方式。函数指针的灵活性为回调机制的实现提供了基础。
下面将进一步介绍回调机制的概念及其用途。
# 3. 理解回调机制
回调机制是一种常见的程序设计模式,特别适用于事件驱动的编程。在回调机制中,函数指针用于传递函数作为参数,以实现程序在特定事件发生时调用相应的函数。
### 3.1 什么是回调函数
回调函数是指当某个事件发生时,通过函数指针来调用的函数。回调函数的使用可以使程序更加灵活,将控制权交给用户,用户可以根据特定的事件选择不同的函数进行回调。
### 3.2 回调函数的定义和使用
在C编程中,定义一个回调函数需要先声明一个函数指针,然后将函数指针作为参数传递给另一个函数。在特定的事件发生时,该函数将调用回调函数。
下面是一个简单的示例,演示了如何定义和使用回调函数。
```c
#include <stdio.h>
// 声明回调函数的函数指针类型
typedef void (*Callback)(int);
// 定义一个函数,接受回调函数作为参数
void processEvent(int event, Callback callback) {
printf("处理事件: %d\n", event);
callback(event); // 调用回调函数
}
// 定义一个回调函数
void callbackFunction(int event) {
printf("回调函数被触发,事件为: %d\n", event);
}
int main() {
int event = 123;
// 调用函数,传递回调函数作为参数
processEvent(event, callbackFunction);
return 0;
}
```
在上面的示例中,我们首先定义了一个函数指针类型`Callback`,然后定义了一个函数`processEvent`,接受一个整数参数`event`和一个回调

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《C编程》专栏深入探讨了C语言的各个方面,旨在帮助读者建立起扎实的编程基础。从最基础的C编程入门指南开始,逐步深入讲解了C语言的数据类型与变量、循环结构、函数的定义与调用、数组与指针、字符串处理、文件操作、结构体与共用体、动态内存分配等重要概念与技巧。专栏还涵盖了高级指针概念、函数指针、错误处理、标准库函数、多文件编程、以及各种数据结构的实现与应用。通过逐步深入的学习,读者将掌握C编程中的重要知识和技能,从而能够更加灵活、高效地应用C语言进行程序设计与开发。该专栏将对想要深入学习C编程的读者提供全面而系统的指导,使他们能够在实践中获得更好的成长和进步。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MATLAB C4.5算法性能提升秘籍】:代码优化与内存管理技巧

# 摘要
本论文首先概述了MATLAB中C4.5算法的基础知识及其在数据挖掘领域的应用。随后,探讨了MATLAB代码优化的基础,包括代码效率原理、算法性能评估以及优化技巧。深入分析了MATLAB内存管理的原理和优化方法,重点介绍了内存泄漏的检测与预防
【稳定性与混沌的平衡】:李雅普诺夫指数在杜芬系统动力学中的应用

# 摘要
本文旨在介绍杜芬系统的概念与动力学基础,深入分析李雅普诺夫指数的理论和计算方法,并探讨其在杜芬系统动力学行为和稳定性分析中的应用。首先,本文回顾了杜芬系统的动力学基础,并对李雅普诺夫指数进行了详尽的理论探讨,包括其定义、性质以及在动力系统中的角色。
QZXing在零售业中的应用:专家分享商品快速识别与管理的秘诀

# 摘要
QZXing作为一种先进的条码识别技术,在零售业中扮演着至关重要的角色。本文全面探讨了QZXing在零售业中的基本概念、作用以及实际应用。通过对QZXing原理的阐述,展示了其在商品快速识别中的核心技术优势,例如二维码识别技术及其在不同商品上的应用案例。同时,分析了QZXing在提高商品识别速度和零售效率方面的实际效果
【AI环境优化高级教程】:Win10 x64系统TensorFlow配置不再难

# 摘要
本文详细探讨了在Win10 x64系统上安装和配置TensorFlow环境的全过程,包括基础安装、深度环境配置、高级特性应用、性能调优以及对未来AI技术趋势的展望。首先,文章介绍了如何选择合适的Python版本以及管理虚拟环境,接着深入讲解了GPU加速配置和内存优化。在高级特性应用
【宇电温控仪516P故障解决速查手册】:快速定位与修复常见问题

# 摘要
本文全面介绍了宇电温控仪516P的功能特点、故障诊断的理论基础与实践技巧,以及常见故障的快速定位方法。文章首先概述了516P的硬件与软件功能,然后着重阐述了故障诊断的基础理论,包括故障的分类、系统分析原理及检测技术,并分享了故障定位的步骤和诊断工具的使用方法。针对516P的常见问题,如温度显示异常、控制输出不准确和通讯故障等,本文提供了详尽的排查流程和案例分析,并探讨了电气组件和软件故障的修复方法。此外
【文化变革的动力】:如何通过EFQM模型在IT领域实现文化转型
# 摘要
EFQM模型是一种被广泛认可的卓越管理框架,其在IT领域的适用性与实践成为当前管理创新的重要议题。本文首先概述了EFQM模型的核心理论框架,包括五大理念、九个基本原则和持续改进的方法论,并探讨了该模型在IT领域的具体实践案例。随后,文章分析了EFQM模型如何在IT企业文化中推动创新、强化团队合作以及培养领导力和员工发展。最后,本文研究了在多样化
RS485系统集成实战:多节点环境中电阻值选择的智慧
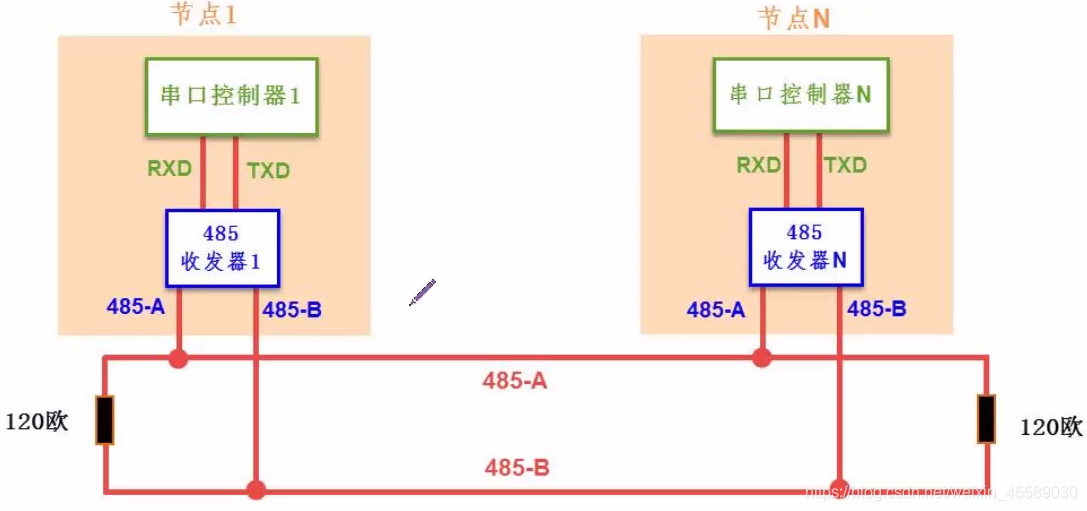
# 摘要
本文系统性地探讨了RS485系统集成的基础知识,深入解析了RS485通信协议,并分析了多节点RS485系统设计中的关键原则。文章
【高级电磁模拟】:矩量法在复杂结构分析中的决定性作用
# 摘要
本文全面介绍了电磁模拟与矩量法的基础理论及其应用。首先,概述了矩量法的基本概念及其理论基础,包括电磁场方程和数学原理,随后深入探讨了积分方程及其离散化过程。文章着重分析了矩量法在处理多层介质、散射问题及电磁兼容性(EMC)方面的应用,并通过实例展示了其在复杂结构分析中的优势。此外,本文详细阐述了矩量法数值模拟实践,包括模拟软件的选用和模拟流程,并对实际案例
SRIO Gen2在云服务中的角色:云端数据高效传输技术深度支持

# 摘要
本文旨在深入探讨SRIO Gen2技术在现代云服务基础架构中的应用与实践。首先,文章概述了SRIO Gen2的技术原理,及其相较于传统IO技术的显著优势。然后,文章详细分析了SRIO Gen2在云服务中尤其是在数据中心的应用场景,并提供了实际案例研
先农熵在食品质量控制的重要性:确保食品安全的科学方法

# 摘要
本文深入探讨了食品质量控制的基本原则与重要性,并引入先农熵理论,阐述其科学定义、数学基础以及与热力学第二定律的关系。通过对先农熵在食品稳定性和保质期预测方面作用的分析,详细介绍了先农熵测量技术及其在原料质量评估、加工过程控制和成品质量监控中的应用。进一步,本文探讨了先农熵与其他质量控制方法的结合,以及其在创新食品保存技术和食品安全法规标准中的应用。最后,通过案例分析,总结了先农熵在食品质量控制中
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )