【无人机视觉革新】:YOLOv8在无人机系统中的集成与应用
发布时间: 2024-12-11 23:56:22 阅读量: 11 订阅数: 13 
# 1. YOLOv8模型概述及其重要性
在当今不断进步的计算机视觉领域中,YOLOv8(You Only Look Once version 8)作为一个先进的实时目标检测系统,其重要性不可小觑。YOLOv8凭借其速度和准确性,已经在多个行业中找到了应用场景,特别是在需要快速准确处理视觉信息的场景中,如无人机视觉系统。
YOLOv8不仅继承了前代版本的实时性和高准确度,更在算法和架构上做出了显著的改进。YOLOv8引入了新的网络结构设计,包括更深层次的卷积神经网络层和改进的注意力机制,从而实现了对目标的更精细检测。同时,YOLOv8还优化了模型的训练过程和参数设置,大大降低了对计算资源的需求,使得在边缘设备上的部署成为可能。
随着无人机技术的发展,对视觉处理系统的要求也越来越高。YOLOv8在性能上的显著提升,使其成为无人机领域中,特别是实时目标检测与跟踪中极具吸引力的选择。这不仅意味着无人机可以更快、更准确地响应环境变化,也代表着无人机技术在未来有更广泛的应用前景。
# 2. 无人机系统架构与视觉处理需求
### 2.1 无人机技术的发展趋势
无人机(Unmanned Aerial Vehicles, UAVs)技术自20世纪以来经历了从军事用途到商业应用的转型。随着技术的不断进步,无人机的应用范围已经扩展至农业、地质勘探、环境监测、影视拍摄、救援行动等多个领域。尤其在自动化和智能化方面,无人机正在发生着革命性的变化。搭载先进的传感器和高精度的摄像设备,使得无人机能够执行更为复杂的任务,例如实时监控、数据采集、目标检测等。
现代无人机系统架构趋向于集成化和模块化,这意味着系统可以更灵活地适应不同的任务需求。同时,随着机器学习和人工智能技术的发展,无人机在视觉处理方面的能力得到了极大的提升。例如,通过深度学习算法,无人机可以对捕获的图像进行实时分析,进而做出自动决策。未来无人机技术的发展趋势将更加注重智能化和自主性,以及通过优化算法和硬件设计来减少功耗和体积。
### 2.2 视觉系统在无人机中的作用
#### 2.2.1 实时视频流的处理
无人机搭载的视觉系统可以实现实时视频流的捕获与处理,这对于遥控操作和自动飞行至关重要。实时视频流处理需要依靠高性能的处理器和优化过的算法,以确保视频数据能够被快速且有效地处理,从而提供低延迟的视觉反馈。视频流处理常常涉及到图像压缩、帧率控制、分辨率调整等环节,这些都是为了确保数据传输的效率和视觉质量之间的平衡。
视频流处理的一个关键要求是能够在保证图像质量的前提下,尽可能降低传输延时,这对于操作人员或者无人机自主控制系统来说都是必要的。为了达到这样的要求,通常需要使用高性能的压缩技术以及优化的传输协议。
#### 2.2.2 视觉导航与目标跟踪
视觉导航是指利用图像识别技术,让无人机能够识别并定位飞行环境中的特定点,从而实现精确的飞行路径规划。此外,目标跟踪技术的应用使得无人机能够在复杂多变的环境中,持续追踪动态目标,这对于搜索和救援、交通监控等场景尤为重要。
为了实现这样的功能,无人机的视觉系统需要集成先进的算法,如机器学习和模式识别技术,将实时图像与预设模型进行比对,快速准确地完成目标识别与跟踪任务。这些技术的进步也为无人机在更加复杂的场景中应用奠定了基础。
### 2.3 YOLOv8的技术优势与适用性分析
#### 2.3.1 YOLOv8的改进之处
YOLO(You Only Look Once)算法是一系列实时目标检测算法的总称,其中YOLOv8是最新版本,它在目标检测速度和准确率上都有显著提升。YOLOv8的改进之处主要体现在以下几个方面:
- **改进的网络架构**:YOLOv8引入了新的网络结构,这种结构在提升检测速度的同时,保持了较高的准确性。例如,通过优化卷积层和使用更高效的激活函数,来减少计算量。
- **锚点框策略优化**:锚点框(anchor boxes)是YOLO系列算法中用于预设目标形状的一种策略。YOLOv8对这一策略进行了调整,使其更能适应不同尺寸和比例的目标。
- **损失函数调整**:损失函数在深度学习模型中至关重要,它衡量了模型预测值与真实值之间的差异。YOLOv8通过调整损失函数的权重,改善了对小目标和重叠目标的检测性能。
#### 2.3.2 YOLOv8与其他模型的对比
将YOLOv8与当前流行的其他目标检测模型(例如Faster R-CNN、SSD等)进行比较,我们可以发现YOLOv8在多个方面具有优势。YOLOv8实现了更快的检测速度和更高的实时性能,这对于资源受限的无人机平台来说非常关键。同时,YOLOv8在准确率上也与这些模型持平甚至超越。
此外,YOLOv8还具备更好的泛化能力。泛化能力是指模型在未见过的数据上的表现,这对于无人机在多种环境中的应用至关重要。YOLOv8通过大量数据的训练以及数据增强技术,提高了模型的鲁棒性,使其在新的环境中仍能保持良好的性能。
为了更详细地了解YOLOv8的性能优势,我们可以参考一些实验数据或进行实际测试。以下是一段假设的性能对比数据表格:
| 模型 | 检测速度 (FPS) | 准确率 (mAP) | 参数数量 (M) | 推理时间 (ms) |
|-------------|----------------|---------------|---------------|----------------|
| YOLOv8 | 150 | 55.0 | 21 | 7.3 |
| Faster R-CNN | 10 | 56.0 | 52 | 21.0 |
| SSD | 60 | 53.5 | 27 | 14.0 |
通过上表我们可以看出,YOLOv8在速度和参数数量上有明显优势,这对于需要快速处理图像信息的无人机系统而言,是一个重要的性能提升。
在接下来的章节中,我们将更具体地探讨YOLOv8如何在无人机的视觉系统中得到应用,包括集成前的准备工作、集成流程详解以及实际应用案例。
# 3. YOLOv8在无人机视觉系统中的集成
集成先进的深度学习模型,如YOLOv8,到无人机视觉系统中是一个复杂的工程。这涉及到硬件和软件的协同工作,以及模型与系统环境的无缝对接。本章深入探讨集成YOLOv8的整个过程,包括集成前的准备工作,集成流程的详解,以及实际案例的分析。
## 3.1 集成前的准备工作
在开始集成YOLOv8到无人机视觉系统之前,需要完成一系列准备工作,以确保集成过程的顺利进行和最终性能的稳定。
### 3.1.1 环境搭建与依赖管理
环境搭建和依赖管理是任何项目成功的基础。对于YOLOv8而言,这包括但不限于以下几点:
- **操作系统选择**:根据YOLOv8的官方文档和兼容性报告,选择一个稳定的Linux发行版,如Ubuntu 20.04 LTS,它被广泛支持并且与许多深度学习框架兼容。
- **依赖库安装**:YOLOv8依赖一系列的深度学习库,如PyTorch、OpenCV等。使用包管理器或者虚拟环境工具(如`conda`或`pip`)安装这些依赖,并确保它们的版本与YOLOv8兼容。
- **硬件加速**:为了充分利用硬件资源,可能需要安装CUDA和cuDNN等NVIDIA显卡加速库。
### 3.1.2 模型训练与优化
在集成YOLOv8之前,可能需要对模型进行进一步的训练或优化以适应特定的应用场景。
- **数据收集与标注**:根据无人机视觉系统的任务需求,收集并标注训练数据。在某些情况下,可能需要从头开始标注,或者使用现有的数据集进行微调。
- **模型训练**:使用收集到的数据,通过深度学习框架(如PyTorch)进行模型训练。同时,需要监控训练过程,如验证集的性能,以防止过拟合。
- **模型优化**:根据训练结果,对模型结构或训练参数进行调整,比如使用模型剪枝、量化等技术减少模型大小和提高推断速度。
## 3.2 YOLOv8集成流程详解
在准备好环境和模型后,接下来是YOLOv8集成到无人机视觉系统的过程。
### 3.2.1 硬件选择与适配
- **硬件选择**:YOLOv8在处理高分辨率视频流时对计算资源的需求较高。因此,选择合适的硬件平台,如带有高性能GPU的NVIDIA Jetson Xavier NX或TX2,对于保证实时处理至关重要。
- **硬件适配**:利用硬件加速库(如NVIDIA TensorRT)来适配YOLOv8模型,实现对GPU的优化,提高模型在实际无人机硬件上的运行效率。
### 3.2.2 软件框架的搭建与集成
- **软件框架搭建**:搭建一个适应无人机操作系统的软件框架,使用诸如ROS(Robot Operating System)之类的中间件,以处理视频流、控制指令和系统状态。
- **集成YOLOv8模型**:将优化后的YOLOv8模型集成到软件框架中。这涉及编写代码来调用模型API,处理输入的视频流,并将模型的输出整合回系统。
```python
import torch
import cv2
import numpy as np
# 加载YOLOv8模型
model = torch.hub.load('ultralytics/yolov8', 'yolov8n') # 例如加载YOLOv8 nano版本
model.eval()
# 视频流处理函数
def process_video_stream(video_stream):
while True:
frame = video_stream.read()
if not frame:
break
# 将帧转换为模型需要的格式
img = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
img = torch.from_numpy(img).to('cuda')
img = img.float() / 255.0
img = img.permute(2, 0, 1).unsqueeze(0)
# 模型推断
results = model(img)
boxes = results.xyxy[0].numpy() #
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 YOLOv8 在各种实时视频检测应用中的部署和应用。从边缘计算到智能交通监控,再到无人机视觉,文章提供了全面的指南,涵盖 YOLOv8 环境搭建、部署策略和实际应用案例。通过深入分析,专栏展示了 YOLOv8 如何推动实时视频检测的创新,为边缘计算、智能交通和无人机系统带来新的可能性。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ROST软件数据可视化技巧:让你的分析结果更加直观动人
:max_bytes(150000):strip_icc()/ScreenShot2019-10-28at1.25.36PM-ab811841a30d4ee5abb2ff63fd001a3b.jpg)
参考资源链接:[ROST内容挖掘系统V6用户手册:功能详解与操作指南](https://wenku.csdn.net/doc/5c20fd2fpo?spm=1055.2635.3001.10343)
RTCM 3.3协议深度剖析:如何构建秒级精准定位系统
参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议简介及其在精准定位中的作用
RTCM (Radio Technical Co
提升航空数据传输效率:AFDX网络数据流管理技巧
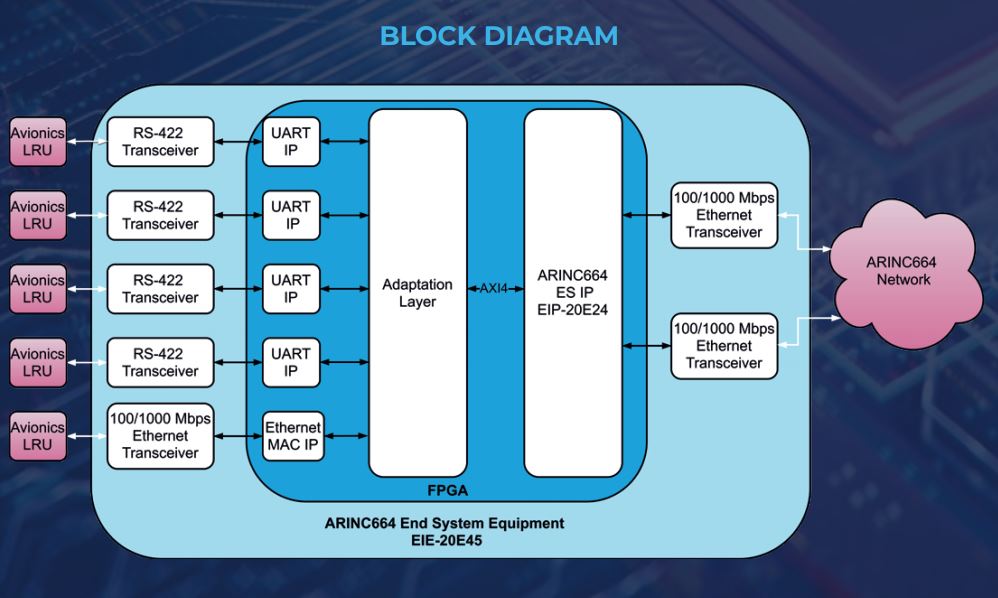
参考资源链接:[AFDX协议/ARINC664中文详解:飞机数据网络](https://wenku.csdn.net/doc/66azonqm6a?spm=1055.2635.3001.10343)
# 1. AFDX网络技术概述
## 1.1 AFDX网络技术的起源与应用背景
AFDX (Avionics Full-Duplex Switched Ethernet) 网络技术,是专为航空电子通信设计
软件开发者必读:与MIPI CSI-2对话的驱动开发策略
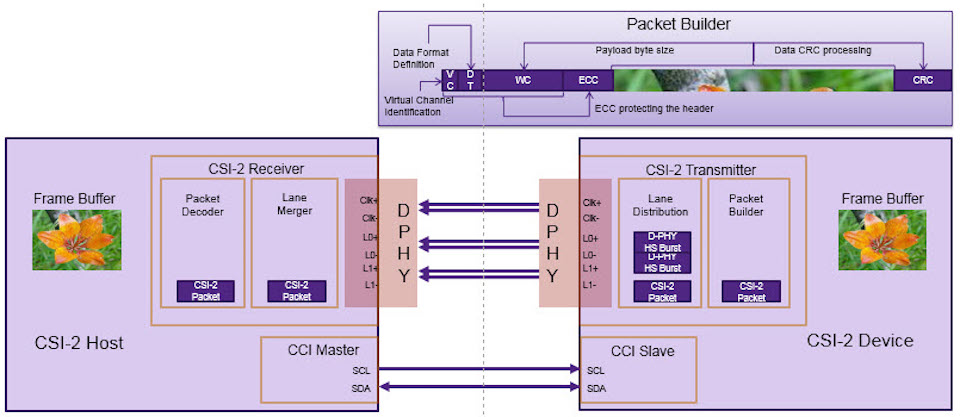
参考资源链接:[mipi-CSI-2-标准规格书.pdf](https://wenku.csdn.net/doc/64701608d12cbe7ec3f6856a?spm=1055.2635.3001.10343)
# 1. MIPI CSI-2协议概述
在当今数字化和移动化的世界里,移动设备图像性能的提升是用户体验的关键部分。为
【PCIe接口新革命】:5.40a版本数据手册揭秘,加速硬件兼容性分析与系统集成
参考资源链接:[2019 Synopsys PCIe Endpoint Databook v5.40a:设计指南与版权须知](https://wenku.csdn.net/doc/3rfmuard3w?spm=1055.2635.3001.10343)
# 1. PCIe接口技术概述
PCIe( Peripheral Component Interconnect Express)是一种高速串行计算机扩展总线标准,被广泛应用于计算机内部连接高速组件。它以点对点连接的方式,能够提供比传统PCI(Peripheral Component Interconnect)总线更高的数据传输率。PCIe的进
ZMODEM协议的高级特性:流控制与错误校正机制的精妙之处

参考资源链接:[ZMODEM传输协议深度解析](https://wenku.csdn.net/doc/647162cdd12cbe7ec3ff9be7?spm=1055.2635.3001.10343)
# 1. ZMODEM协议简介
## 1.1 什么是ZMODEM协议
ZMODEM是一种在串行通信中广泛使用的文件传输协议,它支持二进制数据传输,并可以对数据进行分块处理,确保文件完整无误地传输到目标系统。与早期的XMODEM和YMODEM协
IS903优盘通信协议揭秘:USB通信流程的全面解读

参考资源链接:[银灿IS903优盘完整的原理图](https://wenku.csdn.net/doc/6412b558be7fbd1778d42d25?spm=1055.2635.3001.10343)
# 1. USB通信协议概述
USB(通用串行总线)通信协议自从1996年首次推出以来,已经成为个人计算机和其他电子设备中最普遍的接口技术之一。该章节将概述USB通信协议的基础知识,为后续章节深入探讨USB的硬件结构、信号传输和通信流程等主题打
【功能拓展】创维E900 4K机顶盒应用管理:轻松安装与管理指南
参考资源链接:[创维E900 4K机顶盒快速配置指南](https://wenku.csdn.net/doc/645ee5ad543f844488898b04?spm=1055.2635.3001.10343)
# 1. 创维E900 4K机顶盒概述
在本章中,我们将揭开创维E900 4K机顶盒的神秘面纱,带领读者了解这一强大的多媒体设备的基本信息。我们将从其设计理念讲起,探索它如何为家庭娱乐带来高清画质和智能功能。本章节将为读者提供一个全面的概览,包括硬件配置、操作系统以及它在市场中的定位,为后续章节中关于设置、应用使用和维护等更深入的讨论打下坚实的基础。
创维E900 4K机顶盒采用先
【cx_Oracle数据库管理】:全面覆盖连接、事务、性能与安全性

参考资源链接:[cx_Oracle使用手册](https://wenku.csdn.net/doc/6476de87543f84448808af0d?spm=1055.2635.3001.10343)
# 1. cx_Oracle数据库基础介绍
cx_Oracle 是一个
【深度学习的交通预测力量】:构建上海轨道交通2030的智能预测模型

参考资源链接:[上海轨道交通规划图2030版-高清](https://wenku.csdn.net/doc/647ff0fc
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )