【51单片机C语言实战宝典】:从入门到精通的系统设计与编程指南
发布时间: 2024-07-07 19:18:43 阅读量: 91 订阅数: 35 

新编51单片机C语言教程:从入门到精通实例详解全攻略PPT模板 .pptx
# 1. 51单片机C语言基础
51单片机是一种广泛应用于嵌入式系统中的8位单片机,其C语言编程具有简洁、高效的特点。本节将介绍51单片机C语言的基础知识,包括数据类型、变量、控制结构和函数等内容。
### 1.1 数据类型和变量
数据类型用于定义变量存储的数据类型,C语言中常用的数据类型包括:
- 整型:int、short、long
- 浮点型:float、double
- 字符型:char
- 指针型:指针变量指向其他变量的地址
变量是用于存储数据的内存空间,其定义格式为:
```c
数据类型 变量名;
```
例如:
```c
int num;
```
定义了一个名为num的整型变量。
# 51单片机C语言编程基础
### 2.1 数据类型和变量
#### 2.1.1 数据类型概述
51单片机C语言支持多种数据类型,包括整型、浮点型、字符型和布尔型。其中,整型又分为有符号整型和无符号整型。
| 数据类型 | 取值范围 |
|---|---|
| char | -128~127 |
| unsigned char | 0~255 |
| int | -32768~32767 |
| unsigned int | 0~65535 |
| float | -3.4028235E38~3.4028235E38 |
| double | -1.7976931348623157E308~1.7976931348623157E308 |
| bool | true/false |
#### 2.1.2 变量的定义和使用
变量是用来存储数据的,在使用变量之前需要先进行定义。变量的定义格式如下:
```c
数据类型 变量名;
```
例如:
```c
int num;
char ch;
```
变量定义后,可以通过赋值语句对变量进行赋值。赋值语句的格式如下:
```c
变量名 = 值;
```
例如:
```c
num = 10;
ch = 'a';
```
### 2.2 控制结构
控制结构用于控制程序的执行流程,包括顺序结构、分支结构和循环结构。
#### 2.2.1 顺序结构
顺序结构是最简单的控制结构,程序按照语句的顺序依次执行。
#### 2.2.2 分支结构
分支结构用于根据条件的不同执行不同的代码块,包括if-else语句和switch-case语句。
if-else语句的格式如下:
```c
if (条件) {
// 条件为真时执行的代码块
} else {
// 条件为假时执行的代码块
}
```
switch-case语句的格式如下:
```c
switch (变量) {
case 值1:
// 变量等于值1时执行的代码块
break;
case 值2:
// 变量等于值2时执行的代码块
break;
...
default:
// 变量不等于任何值时执行的代码块
break;
}
```
#### 2.2.3 循环结构
循环结构用于重复执行一段代码块,包括while循环、do-while循环和for循环。
while循环的格式如下:
```c
while (条件) {
// 条件为真时重复执行的代码块
}
```
do-while循环的格式如下:
```c
do {
// 至少执行一次的代码块
} while (条件);
```
for循环的格式如下:
```c
for (初始化; 条件; 递增/递减) {
// 条件为真时重复执行的代码块
}
```
### 2.3 函数
函数是代码的封装,可以被多次调用。函数的定义格式如下:
```c
返回类型 函数名(参数列表) {
// 函数体
}
```
例如:
```c
int add(int a, int b) {
return a + b;
}
```
函数调用时,只需要使用函数名和参数即可。
### 2.4 数组
数组是用来存储相同数据类型的一组数据的。数组的定义格式如下:
```c
数据类型 数组名[数组大小];
```
例如:
```c
int arr[10];
```
数组元素可以通过索引访问,索引从0开始。
```c
arr[0] = 1;
```
# 3.1 输入/输出端口
#### 3.1.1 I/O端口的配置和使用
51单片机具有4个8位的I/O端口,分别为P0、P1、P2和P3。每个端口的每一位都可以独立配置为输入或输出。
**配置I/O端口**
使用`Pxx`寄存器配置I/O端口的模式,其中`xx`表示端口号(0~3)。`Pxx`寄存器的每一位对应一个I/O端口的位,0表示输入,1表示输出。
```c
// 将P0口第0位配置为输入
P0 &= 0xFE;
```
**使用I/O端口**
使用`Pxx`寄存器读写I/O端口的数据。`Pxx`寄存器的每一位对应一个I/O端口的位,读该位的值表示该端口的输入状态,写该位的值表示该端口的输出状态。
```c
// 读P0口第0位的值
uint8_t input = P0 & 0x01;
// 将P0口第0位输出高电平
P0 |= 0x01;
```
#### 3.1.2 中断处理
中断是一种硬件机制,当发生特定事件时,中断程序会暂停当前正在执行的程序,转而去执行中断服务程序。51单片机支持5种中断源:外部中断0、外部中断1、定时器0中断、定时器1中断和串口中断。
**配置中断**
使用`IE`和`IP`寄存器配置中断。`IE`寄存器控制中断使能,每一位对应一个中断源,0表示禁用中断,1表示使能中断。`IP`寄存器控制中断优先级,每一位对应一个中断源,0表示低优先级,1表示高优先级。
```c
// 使能外部中断0
IE |= 0x01;
// 设置外部中断0为高优先级
IP |= 0x01;
```
**编写中断服务程序**
中断服务程序是响应中断事件而执行的代码。中断服务程序必须放在`interrupt`关键字后面。
```c
interrupt void external_interrupt0()
{
// 中断服务程序代码
}
```
**中断处理流程**
当发生中断事件时,51单片机会执行以下步骤:
1. 保存当前程序计数器(PC)和寄存器组(R0~R7)到堆栈。
2. 根据中断源,跳转到相应的中断服务程序。
3. 执行中断服务程序。
4. 从堆栈中恢复PC和寄存器组。
5. 继续执行中断前的程序。
# 4.1 LED控制
### 4.1.1 单个LED控制
**原理:**
LED控制是51单片机应用开发中最为基础的应用之一。其原理是通过设置单片机的I/O端口电平,来控制LED的亮灭。当I/O端口输出高电平时,LED点亮;当I/O端口输出低电平时,LED熄灭。
**代码实现:**
```c
// 定义LED引脚
#define LED_PIN P1_0
// 主函数
void main() {
// 设置LED引脚为输出模式
P1M0 = 0x00;
P1M1 = 0x00;
// 循环点亮和熄灭LED
while (1) {
// 点亮LED
LED_PIN = 1;
Delay1ms(500);
// 熄灭LED
LED_PIN = 0;
Delay1ms(500);
}
}
```
**代码逻辑分析:**
1. 定义LED引脚为P1_0,并将其设置为输出模式。
2. 在主函数中,进入无限循环。
3. 在循环中,将LED引脚设置为高电平,点亮LED,并延时500ms。
4. 随后,将LED引脚设置为低电平,熄灭LED,并延时500ms。
5. 循环重复执行,实现LED的交替点亮和熄灭。
### 4.1.2 多个LED控制
**原理:**
多个LED控制与单个LED控制类似,但需要使用多个I/O端口来控制多个LED。通过设置不同I/O端口的电平,可以实现不同LED的独立控制。
**代码实现:**
```c
// 定义LED引脚
#define LED1_PIN P1_0
#define LED2_PIN P1_1
#define LED3_PIN P1_2
// 主函数
void main() {
// 设置LED引脚为输出模式
P1M0 = 0x00;
P1M1 = 0x00;
// 循环点亮和熄灭LED
while (1) {
// 点亮LED1
LED1_PIN = 1;
// 熄灭LED2和LED3
LED2_PIN = 0;
LED3_PIN = 0;
Delay1ms(500);
// 点亮LED2
LED2_PIN = 1;
// 熄灭LED1和LED3
LED1_PIN = 0;
LED3_PIN = 0;
Delay1ms(500);
// 点亮LED3
LED3_PIN = 1;
// 熄灭LED1和LED2
LED1_PIN = 0;
LED2_PIN = 0;
Delay1ms(500);
}
}
```
**代码逻辑分析:**
1. 定义三个LED引脚,并将其设置为输出模式。
2. 在主函数中,进入无限循环。
3. 在循环中,依次点亮LED1、LED2和LED3,并熄灭其他LED,实现LED的轮流点亮效果。
# 5.1 中断编程
### 5.1.1 中断的原理
中断是一种硬件机制,当发生特定事件时,它会暂停当前正在执行的程序并跳转到一个称为中断服务程序(ISR)的特定代码段。中断事件可以由外部设备(如按键或定时器)或内部事件(如程序错误)触发。
中断处理过程如下:
1. **中断请求:** 当发生中断事件时,硬件会向CPU发送一个中断请求信号。
2. **中断向量:** CPU根据中断请求信号中的中断向量号,确定要跳转到的ISR地址。
3. **保存现场:** ISR开始执行前,CPU会保存当前程序的寄存器值,以便稍后恢复执行。
4. **ISR执行:** ISR执行与中断事件相关的代码,例如处理输入或更新数据。
5. **恢复现场:** ISR执行完成后,CPU恢复保存的寄存器值,然后返回到中断发生前的程序位置继续执行。
### 5.1.2 中断的配置和使用
在51单片机中,中断可以通过以下步骤配置和使用:
1. **启用中断:** 在程序中使用`EA`指令启用全局中断。
2. **设置中断向量:** 使用`ORG`指令将中断向量表放置在指定的内存地址。
3. **编写ISR:** 为每个中断事件编写一个ISR。ISR的入口地址必须与中断向量表中的相应向量号对应。
4. **设置中断优先级:** 如果有多个中断源,可以使用`IP`指令设置中断优先级。优先级高的中断会优先处理。
**代码示例:**
```c
// 启用中断
EA = 1;
// 设置中断向量表
ORG 0x0000
LJMP ISR_Timer0
// 中断服务程序
ISR_Timer0:
// ... ISR代码
RET
```
**参数说明:**
* `EA`:全局中断使能位
* `ORG`:设置程序起始地址
* `LJMP`:长跳转指令
* `RET`:返回指令

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以"51单片机C语言应用程序设计实例精讲"为题,深入探讨51单片机C语言在嵌入式系统开发中的应用。从入门到精通,涵盖了系统设计、编程指南、性能优化、数据结构与算法、中断处理、外设驱动开发、实时操作系统、嵌入式系统开发实战、高级编程技巧、调试与故障排除、代码重用与模块化设计、安全开发、性能优化、云端连接、图形显示、实时控制等方方面面。通过丰富的实例和深入的解析,帮助读者掌握51单片机C语言的应用技巧,打造高效、可靠、安全的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入浅出Java天气预报应用开发:零基础到项目框架搭建全攻略

# 摘要
Java作为一种流行的编程语言,在开发天气预报应用方面显示出强大的功能和灵活性。本文首先介绍了Java天气预报应用开发的基本概念和技术背景,随后深入探讨了Java基础语法和面向对象编程的核心理念,这些为实现天气预报应用提供了坚实的基础。接着,文章转向Java Web技术的应用,包括Servlet与JSP技术基础、前端技术集成和数据库交互技术。在
【GPO高级管理技巧】:提升域控制器策略的灵活性与效率
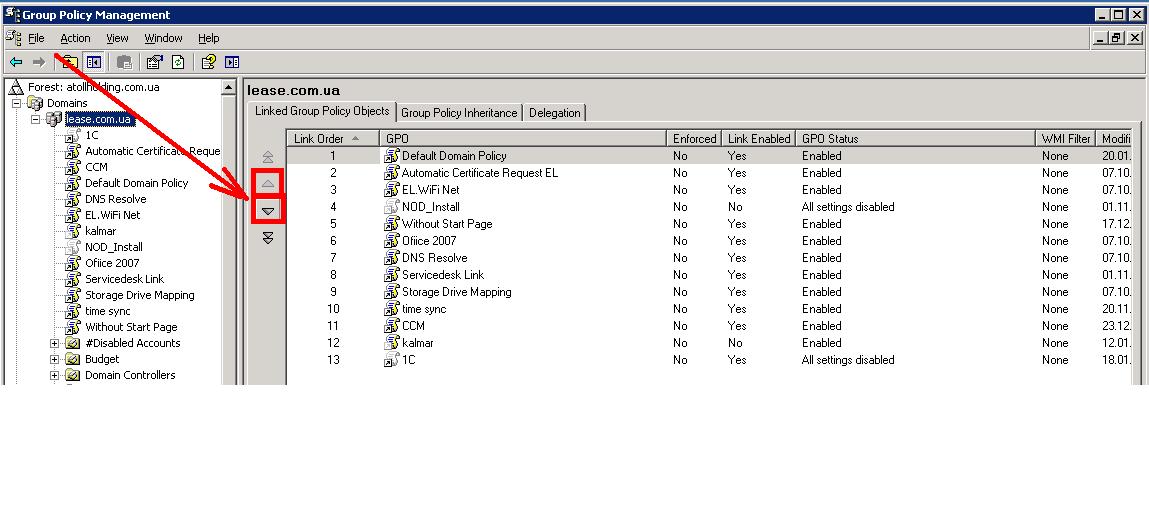
# 摘要
本论文全面介绍了组策略对象(GPO)的基本概念、策略设置、高级管理技巧、案例分析以及安全策略和自动化管理。GPO作为一种在Windows域环境中管理和应用策略的强大工具,广泛应用于用户配置、计算机配置、安全策略细化与管理、软件安装与维护。本文详细讲解了策略对象的链接与继承、WMI过滤器的使用以及GPO的版本控制与回滚策略,同时探讨了跨域策略同步、脚本增强策略灵活性以及故障排除与
高级CMOS电路设计:传输门创新应用的10个案例分析

# 摘要
本文全面介绍了CMOS电路设计基础,特别强调了传输门的结构、特性和在CMOS电路中的工作原理。文章深入探讨了传输门在高速数据传输、模拟开关应用、低功耗设计及特殊功能电路中的创新应用案例,以及设计优化面临的挑战,包括噪声抑制、热效应管理,以及传输门的可靠性分析。此外,本文展望了未来CMOS技术与传输门相结合的趋势,讨论了新型
计算机组成原理:指令集架构的演变与影响

# 摘要
本文综合论述了计算机组成原理及其与指令集架构的紧密关联。首先,介绍了指令集架构的基本概念、设计原则与分类,详细探讨了CISC、RISC架构特点及其在微架构和流水线技术方面的应用。接着,回顾了指令集架构的演变历程,比较了X86到X64的演进、RISC架构(如ARM、MIPS和PowerPC)的发展,以及SIMD指令集(例如AVX和NEON)的应用实例。文章进一步分析了指令集
KEPServerEX秘籍全集:掌握服务器配置与高级设置(最新版2018特性深度解析)
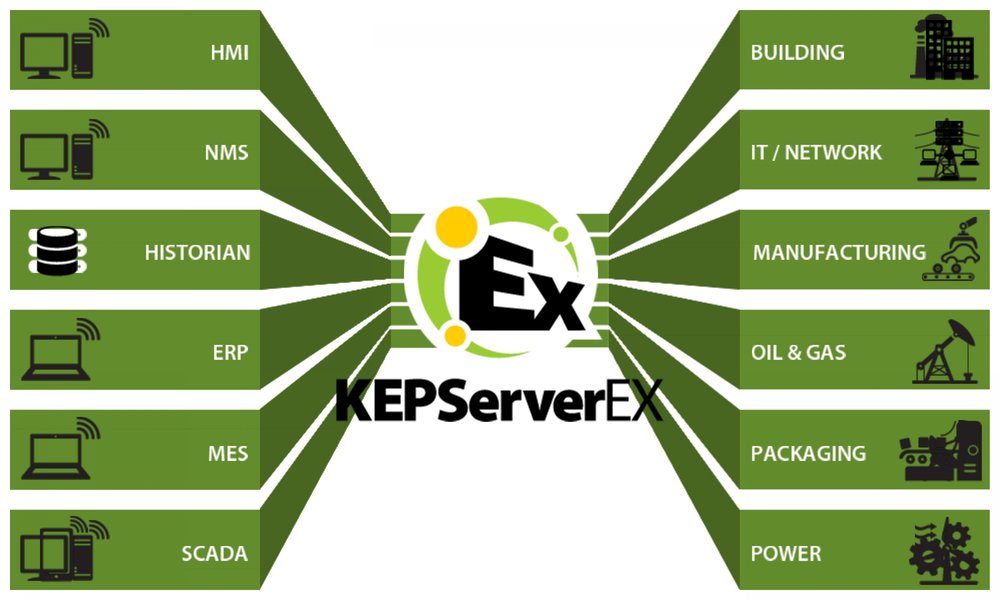
# 摘要
KEPServerEX作为一种广泛使用的工业通信服务器软件,为不同工业设备和应用程序之间的数据交换提供了强大的支持。本文从基础概述入手,详细介绍了KEPServerEX的安装流程和核心特性,包括实时数据采集与同步,以及对通讯协议和设备驱动的支持。接着,文章深入探讨了服务器的基本配置,安全性和性能优化的高级设
TSPL2批量打印与序列化大师课:自动化与效率的完美结合

# 摘要
TSPL2是一种广泛应用于打印和序列化领域的技术。本文从基础入门开始,详细探讨了TSPL2的批量打印技术、序列化技术以及自动化与效率提升技巧。通过分析TSPL2批量打印的原理与优势、打印命令与参数设置、脚本构建与调试等关键环节,本文旨在为读者提供深入理解和应用TSPL2技术的指
【3-8译码器构建秘籍】:零基础打造高效译码器

# 摘要
3-8译码器是一种广泛应用于数字逻辑电路中的电子组件,其功能是从三位二进制输入中解码出八种可能的输出状态。本文首先概述了3-8译码器的基本概念及其工作原理,并
EVCC协议源代码深度解析:Gridwiz代码优化与技巧
# 摘要
本文全面介绍了EVCC协议和Gridwiz代码的基础结构、设计模式、源代码优化技巧、实践应用分析以及进阶开发技巧。首先概述了EVCC协议和Gridwiz代码的基础知识,随后深入探讨了Gridwiz的架构设计、设计模式的应用、代码规范以及性能优化措施。在实践应用部分,文章分析了Gridwiz在不同场景下的应用和功能模块,提供了实际案例和故障诊断的详细讨论。此外,本文还探讨了
JFFS2源代码深度探究:数据结构与算法解析

# 摘要
JFFS2是一种广泛使用的闪存文件系统,设计用于嵌入式设备和固态存储。本文首先概述了JFFS2文件系统的基本概念和特点,然后深入分析其数据结构、关键算法、性能优化技术,并结合实际应用案例进行探讨。文中详细解读了JFFS2的节点类型、物理空间管理以及虚拟文件系统接口,阐述了其压
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )