PIC单片机程序设计:C语言编程实战,解锁高效开发
发布时间: 2024-07-09 13:34:55 阅读量: 98 订阅数: 26 

# 1. PIC单片机简介和开发环境搭建**
PIC单片机是一种微控制器,广泛应用于嵌入式系统中。它具有低功耗、高性能和易于编程的特点。
要开始使用PIC单片机,需要搭建一个开发环境。通常使用集成开发环境(IDE),如MPLAB X,它提供了一个图形界面,用于编写、编译和调试代码。此外,还需要一个编译器,如XC8,将C语言代码编译成PIC单片机可以执行的机器代码。
# 2. C语言基础
### 2.1 数据类型和变量
#### 2.1.1 数据类型概述
C语言中提供了多种数据类型,用于表示不同类型的变量。常见的整数类型包括:
- `char`:8位有符号字符型
- `short`:16位有符号短整型
- `int`:32位有符号整型
- `long`:64位有符号长整型
浮点类型用于表示实数,包括:
- `float`:32位单精度浮点型
- `double`:64位双精度浮点型
其他数据类型包括:
- `void`:表示没有返回值的函数
- `struct`:结构体,用于将相关数据组织在一起
- `enum`:枚举类型,用于定义一组常量
#### 2.1.2 变量的定义和使用
变量是用来存储数据的内存单元。要定义一个变量,需要指定其数据类型和变量名。例如:
```c
int age;
```
这将定义一个名为 `age` 的 32 位有符号整型变量。
要使用变量,可以使用其变量名。例如:
```c
age = 25;
```
这将把值 25 赋值给变量 `age`。
### 2.2 运算符和表达式
#### 2.2.1 算术运算符
算术运算符用于对数值进行算术运算。常见的算术运算符包括:
| 运算符 | 含义 |
|---|---|
| `+` | 加法 |
| `-` | 减法 |
| `*` | 乘法 |
| `/` | 除法 |
| `%` | 取余 |
例如:
```c
int sum = 10 + 20; // sum = 30
```
#### 2.2.2 逻辑运算符
逻辑运算符用于对布尔值进行逻辑运算。常见的逻辑运算符包括:
| 运算符 | 含义 |
|---|---|
| `&&` | 与运算 |
| `||` | 或运算 |
| `!` | 非运算 |
例如:
```c
int isTrue = (age > 18) && (age < 65); // isTrue = true
```
#### 2.2.3 赋值运算符
赋值运算符用于将值赋值给变量。常见的赋值运算符包括:
| 运算符 | 含义 |
|---|---|
| `=` | 普通赋值 |
| `+=` | 加法赋值 |
| `-=` | 减法赋值 |
| `*=` | 乘法赋值 |
| `/=` | 除法赋值 |
例如:
```c
age += 10; // age = 35
```
### 2.3 控制语句
#### 2.3.1 if-else语句
`if-else` 语句用于根据条件执行不同的代码块。语法如下:
```c
if (condition) {
// 代码块 1
} else {
// 代码块 2
}
```
例如:
```c
if (age > 18) {
printf("成年人\n");
} else {
printf("未成年人\n");
}
```
#### 2.3.2 switch-case语句
`switch-case` 语句用于根据变量的值执行不同的代码块。语法如下:
```c
switch (variable) {
case value1:
// 代码块 1
break;
case value2:
// 代码块 2
break;
default:
// 默认代码块
}
```
例如:
```c
switch (age) {
case 18:
printf("刚成年\n");
break;
case 25:
printf("青年\n");
break;
default:
printf("其他年龄段\n");
}
```
#### 2.3.3 循环语句
循环语句用于重复执行一段代码块。常见的循环语句包括:
- `for` 循环:用于重复执行一段代码块指定次数。
- `while` 循环:用于重复执行一段代码块,直到条件为假。
- `do-while` 循环:用于重复执行一段代码块,至少执行一次。
例如:
```c
// for 循环
for (int i = 0; i < 10; i++) {
printf("%d\n", i);
}
// while 循环
while (age < 18) {
printf("未成年\n");
age++;
}
// do-while 循环
do {
printf("成年人\n");
age++;
} while (age < 18);
```
# 3.1 PIC单片机架构和寄存器
#### 3.1.1 PIC单片机内部结构
PIC单片机内部结构主要包括以下几个部分:
- **中央处理单元(CPU)**:负责执行指令和处理数据。
- **存储器**:包括程序存储器(Flash)和数据存储器(RAM)。
- **输入/输出(I/O)端口**:用于与外部设备进行通信。
- **定时器**:用于生成定时中断和测量时间间隔。
- **中断控制器**:用于管理来自外部设备或内部事件的中断请求。
#### 3.1.2 寄存器概述
寄存器是CPU内部的小型存储单元,用于临时存储数据和控制程序执行。PIC单片机具有丰富的寄存器集,包括:
- **通用寄存器**:用于存储数据和地址。
- **特殊功能寄存器(SFR)**:用于控制和配置单片机的各种功能,如I/O端口、定时器和中断。
- **状态寄存器**:用于存储CPU的状态信息,如进位标志和零标志。
### 3.2 I/O端口编程
#### 3.2.1 I/O端口的配置
PIC单片机的I/O端口可以通过寄存器进行配置,以定义其方向(输入或输出)和电气特性(如三态或上拉电阻)。
```c
// 将端口A的第3位配置为输出
TRISA3 = 0;
```
#### 3.2.2 I/O端口的读写操作
I/O端口的读写操作可以通过寄存器进行,分别使用`PORTA`寄存器和`LATA`寄存器。
```c
// 读取端口A的第3位
uint8_t value = PORTA3;
// 将值写入端口A的第3位
PORTA3 = 0;
```
### 3.3 定时器编程
#### 3.3.1 定时器的类型和功能
PIC单片机具有多种类型的定时器,包括:
- **定时器0**:8位定时器,用于生成定时中断和测量时间间隔。
- **定时器1**:16位定时器,具有更长的计数范围和更多的功能。
- **定时器2**:32位定时器,用于高精度计时和测量。
#### 3.3.2 定时器的配置和使用
定时器的配置和使用需要对寄存器进行设置,包括:
- **控制寄存器**:用于配置定时器的模式、时钟源和中断使能。
- **计数寄存器**:用于存储定时器的当前计数值。
- **比较寄存器**:用于设置定时器中断的触发点。
```c
// 配置定时器0为8位模式,时钟源为内部时钟
T0CON = 0x01;
// 设置定时器0的计数值为100
TMR0 = 100;
// 启用定时器0中断
INTCONbits.TMR0IE = 1;
```
# 4. PIC单片机C语言实战
### 4.1 LED闪烁程序
#### 4.1.1 程序设计
```c
// LED闪烁程序
// 宏定义LED端口
#define LED_PORT PORTB
// 宏定义LED位
#define LED_BIT 0
// 主函数
void main() {
// 设置LED端口为输出模式
TRISB &= ~(1 << LED_BIT);
// 无限循环
while (1) {
// LED点亮
LED_PORT |= (1 << LED_BIT);
// 延时1s
__delay_ms(1000);
// LED熄灭
LED_PORT &= ~(1 << LED_BIT);
// 延时1s
__delay_ms(1000);
}
}
```
#### 4.1.2 程序编译和下载
1. 打开MPLAB X IDE,新建一个项目。
2. 选择PIC单片机型号,如PIC16F887。
3. 将上述程序代码复制到源文件中。
4. 编译程序,确保没有错误。
5. 将程序下载到单片机中。
6. 运行程序,观察LED闪烁效果。
### 4.2 按键检测程序
#### 4.2.1 程序设计
```c
// 按键检测程序
// 宏定义按键端口
#define KEY_PORT PORTB
// 宏定义按键位
#define KEY_BIT 1
// 主函数
void main() {
// 设置按键端口为输入模式
TRISB |= (1 << KEY_BIT);
// 无限循环
while (1) {
// 检测按键是否按下
if ((KEY_PORT & (1 << KEY_BIT)) == 0) {
// 按键按下,执行相应操作
// ...
}
}
}
```
#### 4.2.2 程序编译和下载
1. 打开MPLAB X IDE,新建一个项目。
2. 选择PIC单片机型号,如PIC16F887。
3. 将上述程序代码复制到源文件中。
4. 编译程序,确保没有错误。
5. 将程序下载到单片机中。
6. 运行程序,按下按键,观察程序执行相应操作。
### 4.3 串口通信程序
#### 4.3.1 程序设计
```c
// 串口通信程序
// 宏定义波特率
#define BAUD_RATE 9600
// 主函数
void main() {
// 初始化串口
UART_Init(BAUD_RATE);
// 无限循环
while (1) {
// 发送数据
UART_Write("Hello World!\r\n");
// 延时1s
__delay_ms(1000);
}
}
```
#### 4.3.2 程序编译和下载
1. 打开MPLAB X IDE,新建一个项目。
2. 选择PIC单片机型号,如PIC16F887。
3. 将上述程序代码复制到源文件中。
4. 编译程序,确保没有错误。
5. 将程序下载到单片机中。
6. 运行程序,使用串口调试工具观察发送的数据。
# 5.1 中断编程
### 5.1.1 中断的概念和类型
**中断**是一种硬件或软件事件,它会暂停当前正在执行的程序,并跳转到一个称为**中断服务程序 (ISR)** 的特殊函数。ISR 执行完成后,程序将从中断发生处继续执行。
PIC 单片机支持多种中断源,包括:
* 外部中断:由外部设备或信号触发
* 内部中断:由内部模块或事件触发,如定时器溢出或 ADC 转换完成
### 5.1.2 中断的配置和使用
要使用中断,需要执行以下步骤:
1. **配置中断源:**设置中断源的优先级、触发方式和使能状态。
2. **编写 ISR:**为每个中断源编写一个 ISR,ISR 中包含要执行的中断处理代码。
3. **使能中断:**在程序中使能全局中断,允许中断发生。
**代码块 5.1:外部中断配置和 ISR**
```c
// 配置外部中断 INT0
INTCONbits.INT0IE = 1; // 使能 INT0 中断
INTCON2bits.INTEDG0 = 0; // 设置 INT0 为下降沿触发
// 外部中断 INT0 的 ISR
void interrupt isr_int0() {
// 中断处理代码
}
```
**逻辑分析:**
* `INTCONbits.INT0IE = 1;`:使能 INT0 中断。
* `INTCON2bits.INTEDG0 = 0;`:设置 INT0 为下降沿触发。
* `void interrupt isr_int0()`:外部中断 INT0 的 ISR。
**表格 5.1:PIC 单片机中断类型**
| 中断类型 | 触发方式 |
|---|---|
| 外部中断 | 上升沿、下降沿、变化沿 |
| 定时器中断 | 定时器溢出 |
| ADC 转换中断 | ADC 转换完成 |
| EUSART 中断 | 数据接收、数据发送完成 |
## 5.2 ADC 编程
### 5.2.1 ADC 的基本原理
**模数转换器 (ADC)** 将模拟信号(如电压)转换为数字信号(如二进制数)。PIC 单片机内置 10 位 ADC,可将 0-5V 的模拟电压转换为 0-1023 的数字值。
### 5.2.2 ADC 的配置和使用
要使用 ADC,需要执行以下步骤:
1. **配置 ADC:**设置 ADC 的参考电压、采样时间和转换时钟。
2. **启动转换:**通过软件或硬件触发 ADC 转换。
3. **读取转换结果:**从 ADC 数据寄存器中读取转换结果。
**代码块 5.2:ADC 配置和转换**
```c
// 配置 ADC
ADCON0bits.CHS = 0b0000; // 选择 AN0 引脚作为模拟输入
ADCON0bits.ADON = 1; // 使能 ADC
// 启动 ADC 转换
ADCON0bits.GO_DONE = 1; // 启动 ADC 转换
// 读取转换结果
uint16_t adc_result = ADRESH << 8 | ADRESL; // 读取高 8 位和低 8 位结果
```
**逻辑分析:**
* `ADCON0bits.CHS = 0b0000;`:选择 AN0 引脚作为模拟输入。
* `ADCON0bits.ADON = 1;`:使能 ADC。
* `ADCON0bits.GO_DONE = 1;`:启动 ADC 转换。
* `uint16_t adc_result = ADRESH << 8 | ADRESL;`:读取高 8 位和低 8 位结果。
## 5.3 EEPROM 编程
### 5.3.1 EEPROM 的特性和功能
**EEPROM (电可擦除可编程只读存储器)** 是一种非易失性存储器,即使在断电后也能保留数据。PIC 单片机内置 EEPROM,可用于存储配置数据、校准值或其他需要长期保存的数据。
### 5.3.2 EEPROM 的读写操作
要使用 EEPROM,需要执行以下步骤:
1. **配置 EEPROM:**设置 EEPROM 的读写时钟和保护机制。
2. **写入 EEPROM:**使用 `EEPGWR` 指令将数据写入 EEPROM。
3. **读取 EEPROM:**使用 `EEPGFR` 指令从 EEPROM 中读取数据。
**代码块 5.3:EEPROM 写入和读取**
```c
// 写入 EEPROM
EECON1bits.WREN = 1; // 使能 EEPROM 写入
EEADR = 0x00; // 设置 EEPROM 地址
EEDATA = 0x55; // 写入数据
EECON1bits.WR = 1; // 执行写入操作
// 读取 EEPROM
EECON1bits.RD = 1; // 执行读取操作
uint8_t eeprom_data = EEDATA; // 读取数据
```
**逻辑分析:**
* `EECON1bits.WREN = 1;`:使能 EEPROM 写入。
* `EEADR = 0x00;`:设置 EEPROM 地址为 0x00。
* `EEDATA = 0x55;`:写入数据 0x55。
* `EECON1bits.WR = 1;`:执行写入操作。
* `EECON1bits.RD = 1;`:执行读取操作。
* `uint8_t eeprom_data = EEDATA;`:读取数据并存储在变量 `eeprom_data` 中。
# 6. PIC单片机C语言项目实战
### 6.1 数字时钟项目
#### 6.1.1 项目需求分析
数字时钟项目旨在设计一个基于PIC单片机的数字时钟,能够显示时、分、秒,并具有以下功能:
- **时钟显示:**显示当前时间,格式为“hh:mm:ss”。
- **时间设置:**允许用户通过按键设置时、分、秒。
- **闹钟功能:**设置闹钟时间,当时间到达时触发闹铃。
#### 6.1.2 程序设计和实现
**硬件电路设计:**
- PIC单片机
- LED显示器
- 按键
- 实时时钟模块(可选)
**软件程序设计:**
**主程序框架:**
```c
#include <pic.h>
// 定义按键引脚
#define KEY1 PORTBbits.RB0
#define KEY2 PORTBbits.RB1
// 定义LED显示器引脚
#define LED1 PORTCbits.RC0
#define LED2 PORTCbits.RC1
#define LED3 PORTCbits.RC2
#define LED4 PORTCbits.RC3
// 定义闹钟时间
unsigned char alarm_hour = 10;
unsigned char alarm_minute = 30;
unsigned char alarm_second = 0;
// 定义当前时间
unsigned char hour = 0;
unsigned char minute = 0;
unsigned char second = 0;
void main() {
// 初始化IO口
TRISB = 0xFF;
TRISC = 0x00;
// 初始化实时时钟模块(可选)
// 主循环
while (1) {
// 获取当前时间
// ...
// 显示时间
// ...
// 检测按键
// ...
// 设置时间
// ...
// 设置闹钟
// ...
// 触发闹铃
// ...
}
}
```
**时间获取:**
```c
void get_time() {
// 从实时时钟模块获取时间(可选)
// ...
// 或者从内部寄存器获取时间
hour = TMR0;
minute = TMR1;
second = TMR2;
}
```
**时间显示:**
```c
void display_time() {
// 将时间转换为BCD码
// ...
// 显示时
LED1 = (hour & 0x10) >> 4;
LED2 = hour & 0x0F;
// 显示分
LED3 = (minute & 0x10) >> 4;
LED4 = minute & 0x0F;
// 显示秒
// ...
}
```
**按键检测:**
```c
void check_key() {
// 检测按键1
if (KEY1 == 0) {
// ...
}
// 检测按键2
if (KEY2 == 0) {
// ...
}
}
```
**时间设置:**
```c
void set_time() {
// ...
}
```
**闹钟设置:**
```c
void set_alarm() {
// ...
}
```
**闹铃触发:**
```c
void trigger_alarm() {
// ...
}
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 PIC 单片机程序设计专栏,这里为您提供从入门到精通的全面指南。专栏涵盖了 PIC 单片机程序设计的各个方面,包括汇编语言、C 语言编程、外设接口、中断处理、定时器应用、串口通信、SPI 总线、CAN 总线、实时操作系统、物联网应用、故障诊断、常见问题解答、性能提升秘籍和安全设计。无论您是初学者还是经验丰富的程序员,本专栏都能为您提供宝贵的见解和实用技巧,帮助您开发高效、可靠且安全的 PIC 单片机程序。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
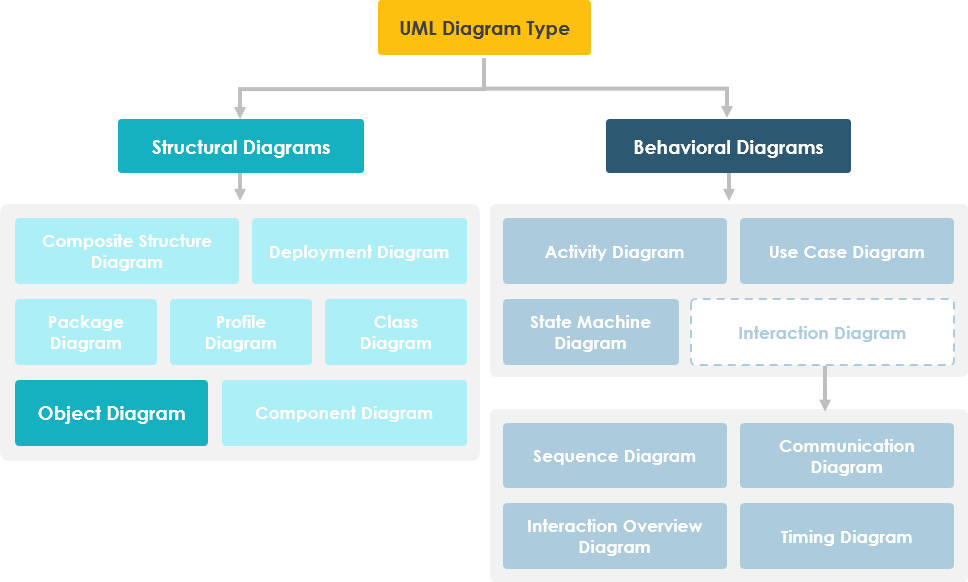
【银行系统建模基础】:UML图解入门与实践,专业破解建模难题
# 摘要
本文系统地介绍了UML在银行系统建模中的应用,从UML基础理论讲起,涵盖了UML图解的基本元素、关系与连接,以及不同UML图的应用场景。接着,本文深入探讨了银行系统用例图、类图的绘制与分析,强调了绘制要点和实践应用。进一步地,文章阐释了交互图与活动图在系统行为和业务流程建模中的设
深度揭秘:VISSIM VAP高级脚本编写与实践秘籍
# 摘要
本文详细探讨了VISSIM VAP脚本的编程基础与高级应用,旨在为读者提供从入门到深入实践的完整指导。首先介绍了VAP脚本语言的基础知识,包括基础语法、变量、数据类型、控制结构、类与对象以及异常处理,为深入编程打下坚实的基础。随后,文章着重阐述了VAP脚本在交通模拟领域的实践应用,包括交通流参数控制、信号动态管理以及自定义交通规则实现等。本文还提供了脚本优化和性能提升的策略,以及高级数据可视化技术和大规模模拟中的应用。最
【软件实施秘籍】:揭秘项目管理与风险控制策略
# 摘要
软件实施项目管理是一个复杂的过程,涉及到项目生命周期、利益相关者的分析与管理、风险管理、监控与控制等多个方面。本文首先介绍了项目管理的基础理论,包括项目定义、利益相关者分析、风险管理框架和方法论。随后,文章深入探讨了软件实施过程中的风险控制实践,强调了风险预防、问题管理以及敏捷开发环境下的风险控制策略。在项目监控与控制方面,本文分析了关键指标、沟通管理与团队协作,以及变
RAW到RGB转换技术全面解析:掌握关键性能优化与跨平台应用策略

# 摘要
本文系统地介绍了RAW与RGB图像格式的基础知识,深入探讨了从RAW到RGB的转换理论和实践应用。文章首先阐述了颜色空间与色彩管理的基本概念,接着分析了RAW
【51单片机信号发生器】:0基础快速搭建首个项目(含教程)

# 摘要
本文系统地介绍了51单片机信号发生器的设计、开发和测试过程。首先,概述了信号发生器项目,并详细介绍了51单片机的基础知识及其开发环境的搭建,包括硬件结构、工作原理、开发工具配置以及信号发生器的功能介绍。随后,文章深入探讨了信号发生器的设计理论、编程实践和功能实现,涵盖了波形产生、频率控制、编程基础和硬件接口等方面。在实践搭建与测试部分,详细说明了硬件连接、程序编写与上传、以
深入揭秘FS_Gateway:架构与关键性能指标分析的五大要点

# 摘要
FS_Gateway作为一种高性能的系统架构,广泛应用于金融服务和电商平台,确保了数据传输的高效率与稳定性。本文首先介绍FS_Gateway的简介与基础架构,然后深入探讨其性能指标,包括吞吐量、延迟、系统稳定性和资源使用率等,并分析了性能测试的多种方法。针对性能优化,本文从硬件和软件优化、负载均衡及分布式部署角度提出策略。接着,文章着重阐述了高可用性架构设计的重要性和实施策略,包括容错机制和故障恢复流程。最后,通过金
ThinkServer RD650故障排除:快速诊断与解决技巧

# 摘要
本文全面介绍了ThinkServer RD650服务器的硬件和软件故障诊断、解决方法及性能优化与维护策略。首先,文章对RD650的硬件组件进行了概览,随后详细阐述了故障诊断的基础知识,包括硬件状态的监测、系统日志分析、故障排除工具的使用。接着,针对操作系统级别的问题、驱动和固件更新以及网络与存储故障提供了具体的排查和处理方法。文章还探讨了性能优化与
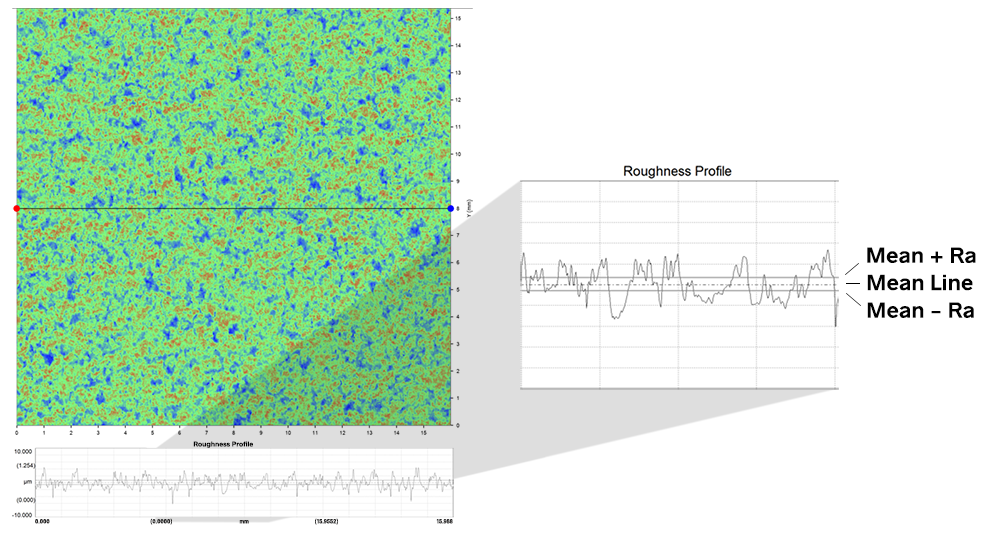
CATIA粗糙度参数实践指南:设计师的优化设计必修课
# 摘要
本文详细探讨了CATIA软件中粗糙度参数的基础知识、精确设定及其在产品设计中的综合应用。首先介绍了粗糙度参数的定义、分类、测量方法以及与材料性能的关系。随后,文章深入解析了如何在CATIA中精确设定粗糙度参数,并阐述了这些参数在不同设计阶段的优化作用。最后,本文探讨了粗糙度参数在机械设计、模具设计以及质量控制中的应用,提出了管理粗糙度参数的高级策略,包括优化技术、自动化和智能
TeeChart跨平台部署:6个步骤确保图表控件无兼容问题
# 摘要
本文介绍TeeChart图表控件的跨平台部署与兼容性分析。首先,概述TeeChart控件的功能、特点及支持的图表类型。接着,深入探讨TeeChart的跨平台能力,包括支持的平台和部署优势。第三章分析兼容性问题及其解决方案,并针对Windows、Linux、macOS和移动平台进行详细分析。第四章详细介绍TeeChart部署的步骤,包括前期准备、实施部署和验证测试。第五
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )