【LINUXCNC故障排除手册】:快速解决常见问题
发布时间: 2025-01-04 14:40:27 阅读量: 24 订阅数: 12 
# 摘要
LinuxCNC是应用于数控机床和机器人控制的开源软件,具备强大的故障排除能力。本文从LinuxCNC的基本概念出发,详细介绍了系统的安装、配置、操作界面以及程序执行过程中的故障排除方法。通过对系统配置要点、操作界面与命令行操作的深入分析,以及程序执行和硬件故障的诊断案例,本文为读者提供了一个全面的LinuxCNC故障排除指南。同时,本文还强调了预防性维护和硬件升级策略的重要性,以及通过综合演练提升故障排除技巧的实践意义,旨在帮助技术人员高效管理和维护LinuxCNC系统,确保数控设备的稳定运行。
# 关键字
LinuxCNC;故障排除;系统安装;配置错误;程序执行;硬件维护
参考资源链接:[LINUXCNC源代码结构解析与学习指南](https://wenku.csdn.net/doc/6412b77cbe7fbd1778d4a772?spm=1055.2635.3001.10343)
# 1. LinuxCNC概述与故障排除基础
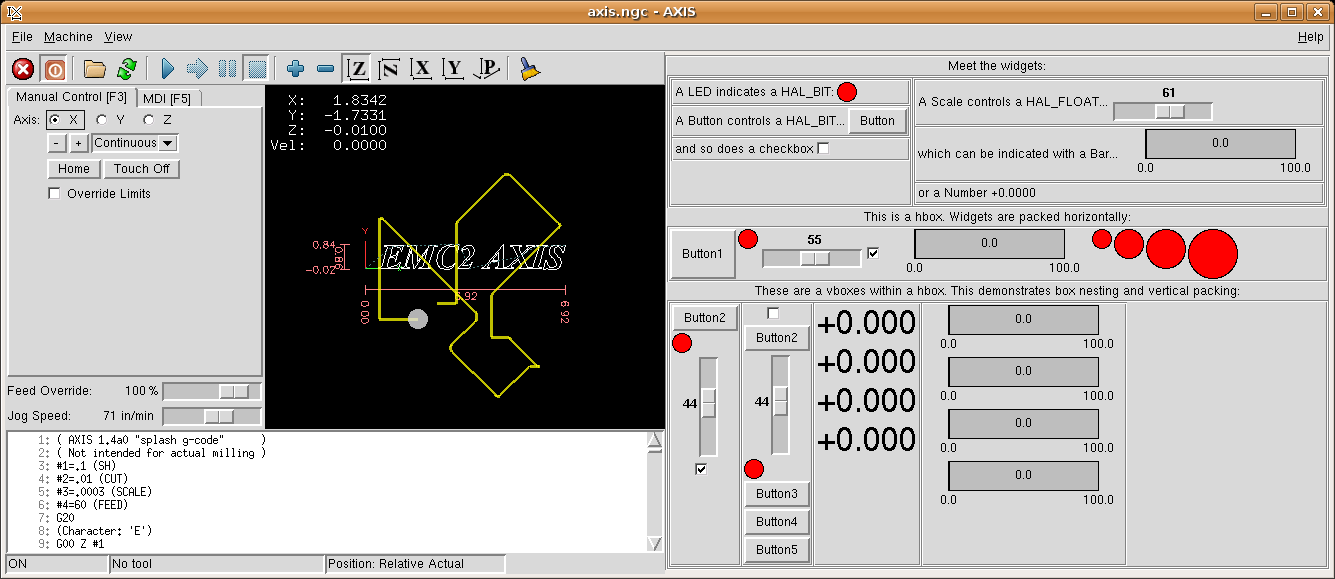
LinuxCNC是一个开源的数控系统,为机器运动控制提供了强大的软件解决方案。它是基于RTAI或Linux内核,能够控制机床和机器人。LinuxCNC广泛应用于学术研究、工业生产和DIY爱好者中,因其灵活性和成本效益而受到推崇。
在故障排除方面,基础是理解和诊断问题的来源。我们将会从LinuxCNC的工作原理入手,讨论一些基本的故障排除技术和思路。这些基础知识能够帮助您迅速定位问题,从而提高生产效率和机器的可靠性。
## 1.1 LinuxCNC的工作原理
LinuxCNC利用实时操作系统(RTOS)来确保运动控制的精确性和可靠性。RTOS能在预定时间内响应事件或信号,这使得LinuxCNC能够实时控制机器的运动,同时处理来自传感器和操作员的输入。其核心是执行G代码程序,将操作员的指令转换为机器能够理解的运动信号。
## 1.2 故障排除的基本步骤
进行故障排除时,首先需要观察系统的当前状态,比如机床是否在预定的路径上移动,或者是否有错误提示出现。接下来,根据现象查找可能的原因,例如检查输入输出信号是否正常,或者配置文件是否有误设置。最后,通过逐步测试和调整来解决问题。
在下一章中,我们将深入探讨LinuxCNC的安装和配置过程,并介绍如何解决常见的系统配置错误。
# 2. LinuxCNC系统安装与配置问题
### 2.1 LinuxCNC的安装过程
#### 2.1.1 系统要求与兼容性分析
LinuxCNC系统对硬件的要求相对较高,特别是在实时性能方面。为了确保系统运行流畅,我们需要在具备一定配置的计算机上安装LinuxCNC。操作系统通常采用Debian、Ubuntu等基于Linux的发行版,这些发行版对硬件的支持较好,并且易于安装和配置。
在选择硬件时,需特别关注CPU的性能,因为LinuxCNC对实时性要求很高,较新且性能强劲的处理器能提供更好的实时响应能力。此外,还需要考虑主板的USB接口数量和质量,因为这将影响到与外部设备,如步进电机驱动器、I/O设备等的连接。
对于兼容性,要确保所选用的硬件与LinuxCNC支持的硬件列表相符,尤其是查看LinuxCNC支持的主板芯片组和步进电机驱动器的型号。
```mermaid
graph TD
A[开始安装LinuxCNC] --> B[检查系统兼容性]
B --> C[确认硬件兼容性]
C --> D[确认操作系统兼容性]
D --> E[下载LinuxCNC安装包]
E --> F[安装LinuxCNC系统]
```
#### 2.1.2 安装步骤详解
安装LinuxCNC之前,需要确保操作系统已经安装在计算机上。下面是安装LinuxCNC的详细步骤:
1. 更新操作系统软件包列表:
```bash
sudo apt-get update
```
2. 安装LinuxCNC所需的依赖包:
```bash
sudo apt-get install build-essential linux-headers-$(uname -r) libncurses5-dev
```
3. 下载LinuxCNC源码包:
```bash
wget http://linuxcnc.org/downloads/stable/LinuxCNC-2.8.0.tar.gz
```
4. 解压下载的源码包:
```bash
tar -xzvf LinuxCNC-2.8.0.tar.gz
```
5. 进入解压后的目录并编译安装LinuxCNC:
```bash
cd LinuxCNC-2.8.0
./configure
make
sudo make install
```
6. 完成安装后,运行LinuxCNC的测试程序以确保安装正确:
```bash
linuxcnc
```
### 2.2 LinuxCNC的配置要点
#### 2.2.1 配置文件结构与编辑技巧
LinuxCNC通过配置文件来定义机器的行为和操作参数。这些配置文件包含大量的模块化指令,需要根据实际的硬件配置进行相应的修改。一个标准的LinuxCNC配置文件包含了轴定义、IO配置、运动控制器设置等多个部分。
编辑技巧方面,推荐使用文本编辑器的语法高亮功能,以便于区分不同的配置指令和参数。例如,使用带有LinuxCNC语言语法支持的编辑器,如Vim或者Emacs。此外,配置文件应谨慎修改,并在每次修改后使用LinuxCNC提供的诊断工具进行检查,确保配置文件没有语法错误。
```bash
linuxcnc -dryrun your_configuration_file
```
上述命令将会检查配置文件中的语法错误而不启动机器。
#### 2.2.2 硬件抽象层(HAL)设置
硬件抽象层(HAL)是LinuxCNC的一个核心组件,它允许用户定义输入输出(I/O)和运动控制的软逻辑。HAL使得LinuxCNC能够与各种硬件设备进行交互。配置HAL涉及定义组件(如步进电机驱动器、限位开关、传感器等)的参数和连接。
一个典型的HAL配置文件可能包含如下内容:
```hal
# 定义步进电机组件
loadrt stepgen step_type=0,0,0,0,0,0,0,0
addf stepgen.0 servo-thread
net X-step => stepgen.0.ena
net X-dir => stepgen.0.dir
net X-step => stepgen.0.stp[0]
net X-speed => stepgen.0.speed[0]
# 定义限位开关组件
loadrt limit2 count=2
addf limit2.0 read-vl
addf limit2.1 read-vl
# 连接组件和轴
setp limit2.0.in0 true
setp limit2.0.in1 true
setp limit2.1.in0 false
setp limit2.1.in1 false
```
HAL文件的编辑需要对LinuxCNC的HAL组件有深入的理解,可以通过查阅LinuxCNC的官方文档来了解每个组件的功能和参数。
### 2.3 系统配置错误诊断与修复
#### 2.3.1 常见配置错误案例
在LinuxCNC的配置过程中,经常会出现一些常见的错误。例如,步进电机参数配置错误,导致步进电机响应不正常,或是I/O端口映射错误,致使外部设备无法正确响应控制指令。此外,还有一个常见的问题就是轴的运动参数设置不准确,这会造成机器运行时的抖动或者超程。
#### 2.3.2 错误修复方法与预防策略
遇到上述问题,首先应该通过查看日志文件来确定错误发生的位置和类型。LinuxCNC的日志文件通常位于系统的日志目录下,并以`.log`为后缀。错误诊断可以使用如下命令:
```bash
tail -f /var/log/linuxcnc.log
```
修复错误时,需要根据日志文件提供的错误信息,回溯到配置文件中对应的设置部分进行调整。例如,如果发现步进电机控制指令未正确发送,可能需要调整步进电机的

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0

专栏简介
LINUXCNC源程序原理说明专栏深入剖析了LINUXCNC源程序的各个方面,从编译与调试、实时性能优化、代码可维护性提升、故障排除到性能监控与优化,全面阐述了LINUXCNC源程序的原理和应用。专栏还提供了从零开始的开发环境搭建、多线程并发控制、网络通信设计、硬件交互、运动控制数据管理、事件驱动模型、日志系统和操作安全性等方面的详细指南,帮助读者深入理解和应用LINUXCNC源程序,提高其开发和维护能力,从而打造稳定高效的LINUXCNC系统。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
天地图API新手入门:7个注意事项助你快速上手地图操作

# 摘要
本文全面介绍了天地图API的使用方法和高级应用技巧,涵盖了从基础配置到高级功能开发的各个方面。首先,本文对天地图API进行了基础介绍,并详细说明了账号注册、开发环境搭建以及基础知识点的掌握。随后,文章深入探讨了天地图API的基本操作,包括地图的展示与控制、元素的添加与管理以及事件的监听与交互。在此基础上,本文进一步讨论了天地图API在地理查询、数据分析以及数据可视化等高级应用中的技巧。最后,通过具体的实践案例分析,
【考务系统组件功能分析】:数据流图中的关键模块解读,提升系统效能的秘诀
# 摘要
考务系统是教育和考试管理的核心,其高效运作对于确保考试的公正性和效率至关重要。本文首先概述了考务系统的定义、作用、主要功能和基本架构。接着,详细分析了系统各组件的功能,包括前端用户交互、后端业务逻辑、数据存储以及报表与分析组件的详细功能和特点。文章第三章深入探讨了数据流图的构建和应用,以及通过数据流分析识别和优化系统性能瓶颈。第四章通过案例
【MCGS数据管理秘法】:优化数据处理,提升HMI性能
# 摘要
本文详细探讨了MCGS(监视控制和数据采集系统)中的数据管理技术,以及其对HMI(人机界面)性能优化的影响。首先介绍了数据管理基础和与HMI性能优化相关的理论,强调了数据流的重要性
揭秘中国移动用户卡技术规范V2.0.0:如何达到硬件兼容性与性能巅峰

# 摘要
本文全面分析了中国移动用户卡技术的发展现状,包括硬件兼容性原理、用户卡性能调优、安全技术以及新兴技术趋势等关键领域。在硬件兼容性方面,探讨了用户卡硬件接口标准、组件功能及其通信机制,并提出了优化策略。性能调优章节着重分析了用户卡性能指标、调优技术以及高性能设计原则。安全技术分析章节涵盖了安全架构、安全威胁的防御机制和安全策略实施。最后,讨论了新兴技术对用户卡的影响、标准化
【理论到实践】深入解析:拉丁超立方抽样原理与应用

# 摘要
拉丁超立方抽样是一种高效的统计模拟技术,广泛应用于工程、经济、金融和生物统计等多个领域。本文首先概述了拉丁超立方抽样的基础知识,然后详细介绍了其数学原理,包括统计抽样理论基础、拉丁超立方抽样的定义和原理、抽样均匀性以及与其它抽样方法的比较。接着,本文阐述了拉丁超立方抽样的实现技术,包括离散和连续空间的抽样算法及其优化策略,并讨论了软件实现中的相关问题。文章第四章通过具体的应用案例分析,展示了拉丁超立方
高速精确控制:STSPIN32G4驱动器,步进电机的终极解决方案

# 摘要
本文全面介绍了STSPIN32G4驱动器及其在步进电机系统中的应用。第一章概述了STSPIN32G4驱动器的基本概念,第二章则详细探讨了步进电机的工作原理、驱动原理以及其应用领域。第三章深入分析了STSPIN32G4的技术细节,包括硬件架构、软件集成和性能参数。第四章讨论了驱动器的配置与优化方法,包含
Python坐标获取与图像处理:结合Graphics和PIL库自动化标注图像
# 摘要
随着图像处理技术在多个领域中的广泛应用,Python语言因其强大的库支持和简洁的语法,已经成为处理图像和坐标获取的热门选择。本文首先概述了Python在坐标获取与图像处理中的应用,随后详细介绍了Graphics库和PIL库的基础知识,以及它们在坐标提取和图像处理中的具体实践。通过分析自动化标注图像的流程设计、坐标与图像的结合处理及性能优化,本文旨在提供一套完整的图
提升坐标转换效率:ArcGIS中80西安到2000国家坐标系转换性能优化指南

# 摘要
本论文系统地探讨了坐标转换在GIS系统中的重要性、基础理论、实际操作方法以及性能优化策略。首先,介绍了坐标系的定义、分类和在GIS中的应用,并分析了坐标转换的数学原理,包括七参数转换模型、高斯-克吕格投影理论,以及误差分析与处理方法。随后,文中详细阐述了ArcGIS中坐标转换工具的种类、操作流程,并通过实践案例展示了如何使用ArcToolbox和脚本自动化进行坐标转换。接着,本研究聚焦于坐标
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )