【PyTorch强化学习:打造智能代理】:终极入门指南与实战案例
发布时间: 2024-12-11 21:55:57 阅读量: 8 订阅数: 7 

深度强化学习极简入门与Pytorch实战
# 1. PyTorch强化学习基础
## 简介
在本章中,我们将探讨PyTorch在强化学习中的应用和基础。强化学习是一种让机器通过与环境的交互学习最优策略的方法,而PyTorch作为一个动态的深度学习框架,提供了强大的工具来实现复杂的强化学习模型。我们将从最基础的概念开始,逐步深入到如何使用PyTorch实现强化学习算法。
## 强化学习概述
强化学习(Reinforcement Learning,RL)是人工智能领域的一个重要分支,它通过奖励机制引导智能体(Agent)在环境中进行探索,从而学习到能够最大化长期累积奖励的决策策略。这种方法模拟了生物进化和学习过程中的试错机制。
强化学习的基本组成元素包括:
- **智能体(Agent)**:作出决策并从环境接收反馈的实体。
- **环境(Environment)**:智能体所处并与其交互的外部世界。
- **状态(State)**:环境在某一时刻的描述。
- **动作(Action)**:智能体可以执行的操作。
- **奖励(Reward)**:智能体执行动作后从环境中获得的反馈。
- **策略(Policy)**:智能体基于当前状态选择动作的规则。
通过这种互动,智能体需要学会如何在各种状态下选择最优动作,以获得最大的累积奖励。这通常需要学习一个函数(价值函数或策略函数)来评估动作的好坏或直接指导动作选择。
## PyTorch在强化学习中的作用
PyTorch不仅提供了构建和训练复杂神经网络的工具,而且其动态计算图的特性非常适合用于实现强化学习中的策略网络和价值网络。此外,PyTorch的梯度计算和优化器使得强化学习的策略学习和价值函数更新变得简单直接。
在接下来的章节中,我们将深入探讨如何使用PyTorch来实现强化学习算法,以及如何构建一个从零开始学习的智能代理。我们会介绍关键的概念、技术和步骤,以及如何结合实际案例来优化和应用这些技术。
# 2. 强化学习理论与算法
### 2.1 马尔科夫决策过程(MDP)
#### 2.1.1 MDP的基本概念和组成
马尔科夫决策过程(Markov Decision Process, MDP)是一种数学框架,它用于描述一个决策者(agent)在环境(environment)中做出一系列决策的过程。MDP是一类随机过程,具有马尔科夫性质,即系统的未来状态仅依赖于当前状态,并与之前的状态无关。MDP由四个基本元素组成:
- **状态空间(S)**:代理可以处于的所有可能状态的集合。
- **动作空间(A)**:代理可以采取的所有可能动作的集合。
- **转移概率函数(P)**:描述了代理从一个状态转移到另一个状态的概率。具体地,P(s'|s,a)表示在当前状态下采取动作a后转移到状态s'的概率。
- **奖励函数(R)**:定义了代理采取特定动作后获得的即时奖励。
一个MDP可以用五元组(S, A, P, R, γ)表示,其中γ是折扣因子,它决定了未来奖励在当前的相对价值。
```python
# 一个简化的MDP定义示例(非可执行代码)
# 状态空间和动作空间
states = ['state1', 'state2', 'state3']
actions = ['action1', 'action2']
# 转移概率函数示例
transition_probabilities = {
'state1': {
'action1': {'state2': 0.7, 'state3': 0.3},
'action2': {'state1': 0.4, 'state3': 0.6},
},
'state2': {
'action1': {'state1': 0.5, 'state3': 0.5},
'action2': {'state3': 1.0},
},
# state3 ...
}
# 奖励函数示例
reward_function = {
'state1': {'action1': 1, 'action2': -1},
'state2': {'action1': 0, 'action2': 0},
# state3 ...
}
# 折扣因子
gamma = 0.95
```
在实际的强化学习应用中,MDP需要根据具体环境进行定义和建模,这是设计智能代理时一个非常重要的步骤。
#### 2.1.2 状态值函数与动作值函数
在MDP中,状态值函数(Value Function)和动作值函数(Action-Value Function)用于量化“好”的程度,分别表示在给定状态下采取特定策略的期望回报,以及在给定状态下采取特定动作并遵循策略的期望回报。
- **状态值函数(V(s))**:给定状态s下的期望回报。即从状态s开始,遵循策略π,预期可以获得的总奖励。
- **动作值函数(Q(s,a))**:给定状态s和动作a下的期望回报。即在状态s下采取动作a,然后遵循策略π的期望回报。
状态值函数和动作值函数之间的关系可以用贝尔曼方程来描述:
- **状态值函数的贝尔曼期望方程**:V(s) = Σ_a π(a|s) Σ_s' P(s'|s,a) [R(s,a,s') + γV(s')]
- **动作值函数的贝尔曼期望方程**:Q(s,a) = Σ_s' P(s'|s,a) [R(s,a,s') + γΣ_a' π(a'|s')Q(s',a')]
这两个函数是评估和改进策略的基础,也是强化学习算法设计的核心。
```python
# 计算状态值函数和动作值函数的伪代码
# V(s) = Σ_a π(a|s) Σ_s' P(s'|s,a) [R(s,a,s') + γV(s')]
# Q(s,a) = Σ_s' P(s'|s,a) [R(s,a,s') + γΣ_a' π(a'|s')Q(s',a')]
def calculate_value_function(P, R, policy, gamma, value_function=None):
"""
计算给定策略的状态值函数。
:param P: 转移概率函数
:param R: 奖励函数
:param policy: 代理的策略
:param gamma: 折扣因子
:param value_function: 初始值函数,如果没有则用0初始化
:return: 状态值函数
"""
# 实现细节略
pass
def calculate_action_value_function(P, R, gamma, Q):
"""
计算动作值函数。
:param P: 转移概率函数
:param R: 奖励函数
:param gamma: 折扣因子
:param Q: 动作值函数
:return: 动作值函数
"""
# 实现细节略
pass
```
了解和计算这些函数对于实现强化学习算法至关重要。在深度强化学习中,这些函数通常通过神经网络进行近似。
# 3. PyTorch在强化学习中的应用
强化学习作为人工智能的一个重要分支,与PyTorch等深度学习框架的结合产生了深度强化学习(Deep Reinforcement Learning, DRL),它通过深度神经网络学习最优策略,以解决传统强化学习中无法处理的高维观测数据问题。本章将深度解析PyTorch在强化学习中的具体应用,包括神经网络的构建、强化学习算法的实现以及构建智能代理的实战过程。
## 3.1 PyTorch的神经网络基础
### 3.1.1 神经网络模块的构建与优化
在深度强化学习中,神经网络扮演着价值函数或策略函数的角色。PyTorch作为Python语言的一个深度学习库,因其动态计算图和灵活的接口而受到开发者的青睐。
PyTorch的`torch.nn`模块提供了构建神经网络所需的所有基本组件。例如,`torch.nn.Linear`用来创建全连接层,`torch.nn.ReLU`则是一个激活函数。通过组合这些模块,我们可以构建复杂的神经网络结构。
下面是一个使用PyTorch创建简单神经网络的代码示例:
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
class SimpleNet(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(SimpleNet, self).__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
# 创建一个输入为10,隐藏层为30,输出为2的简单网络
net = SimpleNet(10, 30, 2)
```
在上述代码中,定义了一个包含单个隐藏层的简单前馈神经网络。首先继承`nn.Module`创建了一个类,然后定义了两个全连接层。`forward`方法定义了数据如何通过网络前向传播。
### 3.1.2 自动微分与梯度下降机制
PyTorch的核心优势之一是自动微分机制,这对于深度强化学习的训练过程至关重要。自动微分可以自动计算梯度,这极大地简化了梯度下降优化算法的实现。
以一个简单的梯度下降为例:
```python
# 假设我们有一个简单的损失函数
def compute_loss(x):
return x ** 2
# 初始化参数
x = torch.randn(1, requires_grad=True)
lr = 0.1 # 学习率
steps = 100 # 训练步数
# 梯度下降
for i in range(steps):
loss = compute_loss(x)
loss.backward() # 反向传播计算梯度
with torch.no_grad(): # 暂时禁用梯度计算,防止追踪
x -= lr * x.grad # 更新参数
x.grad.zero_() # 清空梯度
print(f'最终参数值: {x.item()}')
```
通过`backward()`方法,PyTorch自动计算损失函数关于参数的梯度,然后通过梯度下降更新参数。`zero_()`方法用于将梯度清零,防止梯度累加。
## 3.2 使用PyTorch构建强化学习算法
### 3.2.1 DQN算法的PyTorch实现
深度Q网络(Deep Q-Network, DQN)是将深度学习应用于强化学习的里程碑式工作,它通过学习一个Q值函数来代替传统的Q表,从而处理高维的观测数据。
以下是DQN算法的PyTorch实现的一个简化示例:
```python
import random
from collections import deque
class DQN:
def __init__(self, state_size, action_size):
self.state_size = state_size
self.action_size = action_size
self.memory = deque(maxlen=10000)
self.gamma = 0.95 # 折扣因子
self.epsilon = 1.0 # 探索参数
# ... 其他初始化代码 ...
def act(self, state):
if random.random() <= self.epsilon:
return random.randrange(self.action_size)
state = torch.from_numpy(state).float().unsqueeze(0)
q_values = self.q_net(state)
return q_values.max(1)[1].item()
def replay(self, batch_size):
minibatch = random.sample(self.memory, batch_size)
for state, action, reward, next_state, done in minibatch:
# ... 计算目标和损失 ...
self.optimizer.zero_grad()
loss = ... # 损失函数
loss.backward()
self.optimizer.step()
if self.epsilon > 0.01:
self.epsilon *= 0.995
# 神经网络实现Q函数
class QNetwork(nn.Module):
def __init__(self, state_size, action_size):
super(QNetwork, self).__init__()
self.fc1 = nn.Linear(state_size, 64)
self.fc2 = nn.Linear(64, action_size)
def forward(self, state):
x = F.relu(self.fc1(state))
return self.fc2(x)
# 创建DQN和Q网络实例
state_size = 4
action_size = 2
dqn = DQN(state_size, action_size)
q_net = QNetwork(state_size, action_size)
dqn.q_net = q_net
```
### 3.2.2 策略梯度方法的PyTorch实现
策略梯度方法直接对策略函数进行优化,通过对策略函数的对数进行梯度上升,直接优化期望回报。
策略梯度的PyTorch实现示例如下:
```python
class PolicyNet(nn.Module):
def __init__(self, state_size, action_size):
super(PolicyNet, self).__init__()
self.fc1 = nn.Linear(state_size, 64)
self.fc2 = nn.Linear(64, action_size)
def forward(self, state):
x = torch.tanh(self.fc1(state))
return F.softmax(self.fc2(x), dim=0)
# 策略梯度方法类
class PolicyGradient:
def __init__(self, state_size, action_size):
self.policy_net = PolicyNet(state_size, action_size)
self.optimizer = torch.optim.Adam(self.policy_net.parameters(), lr=1e-2)
def select_action(self, state):
state = torch.from_numpy(state).float().unsqueeze(0)
probs = self.policy_net(state)
m = torch.distributions.Categorical(probs)
action = m.sample()
return action.item(), probs
def step(self, state, action, reward, next_state, done):
# ... 策略梯度更新步骤 ...
pg = PolicyGradient(state_size, action_size)
```
## 3.3 实战:构建一个PyTorch智能代理
### 3.3.1 环境设置与智能代理的基本框架
为了构建一个智能代理,我们需要设置环境并定义智能代理的基本框架。在PyTorch中,我们可以使用OpenAI Gym环境,它提供了大量的模拟环境用于强化学习训练。
```python
import gym
import time
# 创建环境
env = gym.make('CartPole-v0')
state_size = env.observation_space.shape[0]
action_size = env.action_space.n
# 训练设置
num_episodes = 1000
max_timesteps = 200
# 创建智能代理
# ... 根据DQN或策略梯度方法创建代理 ...
start_time = time.time()
for i_episode in range(num_episodes):
state = env.reset()
for t in range(max_timesteps):
action = agent.select_action(state)
next_state, reward, done, _ = env.step(action)
# ... 保存经验、更新网络 ...
state = next_state
if done:
break
# ... 每隔一定周期更新目标网络 ...
print("训练完成,总耗时:{:.2f}秒".format(time.time() - start_time))
```
### 3.3.2 训练和评估智能代理的性能
训练智能代理的核心是对经验进行采样,并利用这些经验来更新网络参数。评估智能代理的性能通常涉及到在测试环境中的表现。
```python
# 评估智能代理
def evaluate_agent(agent, env, num_episodes=100):
rewards = []
for i_episode in range(num_episodes):
state = env.reset()
episode_reward = 0
for _ in range(max_timesteps):
action = agent.select_action(state)
state, reward, done, _ = env.step(action)
episode_reward += reward
if done:
break
rewards.append(episode_reward)
return rewards
# 使用训练好的智能代理评估性能
training_rewards = evaluate_agent(agent, env, num_episodes=100)
print("平均奖励:{:.2f}".format(np.mean(training_rewards)))
```
在上述代码中,我们定义了评估智能代理性能的函数`evaluate_agent`。在训练完成后,我们调用此函数进行性能评估,并打印出平均奖励值。
至此,我们已经演示了如何使用PyTorch构建强化学习算法,并通过智能代理的构建与训练来解决实际问题。在本章的后续部分,我们将继续深入探讨实战案例分析以及强化学习的调试、测试与优化。
在下一节中,我们将继续深入分析强化学习在不同类型的应用案例中的实战表现,探索如何解决真实世界中的复杂问题,并提供详细的代码示例和操作步骤。
# 4. 强化学习实战案例分析
## 4.1 游戏环境中的智能代理开发
强化学习在游戏领域中的应用是一个研究热点,它能够训练出能在复杂环境中自主学习并作出决策的智能代理。智能代理在游戏环境中的行为可以不断通过强化学习算法进行优化,从而提高游戏表现。下面我们深入探讨如何在Atari游戏中开发出一个高性能的智能玩家。
### 4.1.1 打造Atari游戏的智能玩家
Atari游戏因其环境的复杂性、状态空间的连续性和奖励机制的多样性,成为强化学习领域研究的理想平台。我们需要使用深度强化学习模型,特别是结合卷积神经网络(CNN)的深度Q网络(DQN),来提取游戏画面中的信息并作出决策。
在构建Atari智能玩家时,我们通常需要以下步骤:
1. **环境准备**:使用像OpenAI Gym这样的环境来提供 Atari 游戏接口。
2. **模型搭建**:构建一个DQN模型,用CNN来处理视觉输入。
3. **学习过程**:通过与环境交互,使用epsilon-greedy策略来平衡探索和利用。
4. **训练优化**:引入经验回放和目标网络等技术,避免训练过程中的不稳定性。
以下是一个简化的DQN实现示例代码:
```python
import torch
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
class DQN(nn.Module):
def __init__(self, num_inputs, num_actions):
super(DQN, self).__init__()
self.layers = nn.Sequential(
nn.Linear(num_inputs, 128),
nn.ReLU(),
nn.Linear(128, 128),
nn.ReLU(),
nn.Linear(128, num_actions)
)
def forward(self, x):
return self.layers(x)
class Agent(object):
def __init__(self, num_inputs, num_actions):
self.q_net = DQN(num_inputs, num_actions)
self.target_q_net = DQN(num_inputs, num_actions)
self.optimizer = optim.Adam(self.q_net.parameters())
# 这里省略了其它必要的初始化代码
def act(self, state):
# 根据当前模型输出的action值进行选择
pass
def learn(self, experiences):
# 更新模型的逻辑
pass
# 这里省略了环境设置和训练循环等代码
```
在此代码段中,我们定义了一个简单的DQN模型,以及一个智能代理类,该类负责模型的选择和学习。需要注意的是,在实际的模型训练中,还需要添加损失函数、梯度裁剪、目标网络同步等细节,以确保训练过程的稳定和收敛。
### 4.1.2 分析智能代理的决策过程
理解智能代理在游戏中的决策过程,对于研究者来说至关重要。通过分析智能代理的策略,我们可以调整模型结构或训练方法,以优化其性能。研究者经常使用可视化技术来帮助理解复杂的决策过程。
下表描述了智能代理在Atari游戏中的决策过程分析的几个关键点:
| 关键点 | 说明 |
| ------ | ---- |
| 观测输入 | 智能代理首先会观测游戏画面,提取出当前的视觉状态。 |
| 状态表示 | 使用CNN对视觉状态进行处理,得到一个高维度的特征表示。 |
| 选择动作 | 根据DQN模型输出的动作值函数Q,智能代理会选择最优的动作。 |
| 执行与反馈 | 智能代理执行选定的动作,并根据环境反馈得到奖励。 |
| 更新策略 | 利用收集到的转移经验来更新DQN模型,强化其选择最优动作的能力。 |
要深入分析智能代理的决策过程,我们还需结合具体的游戏环境,进行以下活动:
1. **记录游戏画面**:在智能代理玩游戏时,记录每帧的游戏画面。
2. **动作选择可视化**:分析智能代理在特定状态下选择的动作,以及相应的Q值。
3. **奖励回溯**:将收集到的奖励数据进行可视化,了解智能代理如何响应奖励。
4. **策略调整**:根据收集到的反馈,调整智能代理的策略以优化性能。
通过以上分析,我们可以深入理解智能代理的策略,并进一步优化智能代理的性能。例如,我们可能会发现,智能代理在某些复杂场景下决策不佳,这可能需要我们在模型结构或训练方法上做进一步优化。
# 5. 强化学习的调试、测试与优化
## 5.1 调试和监控强化学习过程
调试强化学习模型往往比传统机器学习模型更为复杂,因为强化学习涉及到模型与环境的交互,以及随时间累积的奖励信号。因此,调试和监控强化学习过程需要一系列的工具和策略。
### 5.1.1 日志记录与可视化
在调试强化学习模型时,日志记录和可视化是最基本的工具之一。良好的日志记录能够提供关键信息,帮助开发者了解模型的学习过程,例如:
```python
import logging
# 配置日志记录器
logging.basicConfig(level=logging.DEBUG, format='%(asctime)s - %(levelname)s - %(message)s')
# 训练过程中的日志记录示例
for i in range(100):
loss = train_step() # 假设这是一个训练步骤
logging.debug(f'Epoch {i}: loss = {loss}')
```
日志的每个记录通常包含时间戳、日志级别和实际消息,方便后期审查。
可视化工具如TensorBoard、Visdom等,可以帮助直观地展示训练曲线、权重分布、梯度流动等。以TensorBoard为例,可以如下使用:
```python
from torch.utils.tensorboard import SummaryWriter
# 创建一个SummaryWriter实例
writer = SummaryWriter(log_dir='runs/experiment1')
for step in range(100):
loss = train_step() # 同样假设这是一个训练步骤
writer.add_scalar('loss', loss, step)
```
这段代码会在指定的`log_dir`路径下创建TensorBoard的事件文件,并记录损失值,之后可以在TensorBoard的界面中进行查看。
### 5.1.2 超参数调整和性能瓶颈诊断
超参数的选择对强化学习模型的性能至关重要。调整超参数包括学习率、折扣因子等,通常需要多次实验。而性能瓶颈诊断通常涉及到识别模型中导致训练效率低下的部分,比如过拟合或过慢的收敛速度。
- **超参数调整**可以采用网格搜索、随机搜索或使用贝叶斯优化方法。
- **性能瓶颈诊断**包括监控训练损失和评估奖励,以及使用梯度规范化、正则化方法等。
## 5.2 强化学习算法的测试和评估
评估强化学习算法的性能需要一系列客观的指标和测试方法,以及对抗性测试来评估模型的鲁棒性。
### 5.2.1 评估指标和测试方法
评估指标包括平均奖励、胜利次数、策略的稳定性和收敛速度等。测试方法则可以分为离线测试和在线测试:
- **离线测试**通常在模型训练完成后进行,评估模型在一个确定的或预设的环境中表现。
- **在线测试**则是在模型部署后实时进行的,更多地关注模型在真实世界或实时环境中的表现。
### 5.2.2 对抗性测试与模型鲁棒性分析
在强化学习中,对策略的鲁棒性进行测试是一个特别重要的方面。对抗性测试通过引入对抗样本或策略,来测试模型在异常条件下的表现。例如,在Atari游戏中,可以通过改变游戏规则或加入随机干扰来测试智能代理的鲁棒性。
## 5.3 优化强化学习模型的性能
为了提升训练效率,强化学习模型需要进行优化,这些优化可能包括算法、计算和数据层面的改进。
### 5.3.1 提升训练效率的技术
- **经验回放(Experience Replay)**:通过存储历史经验并随机抽取来打破样本之间的相关性,提高训练稳定性和效率。
- **目标网络(Target Network)**:在DQN中,目标网络用于产生稳定的目标Q值,以减少训练过程中的波动。
### 5.3.2 部署和在线学习的策略
部署强化学习模型时,特别是在在线学习环境中,需要考虑以下因素:
- **可伸缩性**:模型需要能够应对不同规模的问题,包括数据和计算资源。
- **实时反馈**:在线学习需要实时收集反馈并进行调整。
- **安全性和隐私**:确保在学习过程中,策略不会无意中泄露敏感数据或采取危险行动。
以上章节内容展示了强化学习过程中的调试、测试和优化方法,为读者提供了一种系统性的视角来分析和改进强化学习模型的性能。
# 6. 未来趋势与前沿研究
随着计算能力的不断提升和算法的日益完善,强化学习技术正逐步渗透到各个领域,展现出巨大的应用潜力。本章节将探讨强化学习的未来发展与前沿研究方向,包括与深度学习的融合、伦理责任以及在新兴领域的应用。
## 6.1 强化学习与深度学习的融合趋势
强化学习(Reinforcement Learning, RL)与深度学习(Deep Learning, DL)的结合,为复杂问题的解决带来了新思路。深度强化学习(Deep Reinforcement Learning, DRL)通过结合深度神经网络强大的特征提取能力,使得智能体在复杂的环境中能做出更准确的决策。
### 6.1.1 模型预测控制(MPC)与强化学习
模型预测控制(Model Predictive Control, MPC)作为一种先进的控制策略,已经在工业界得到了广泛的应用。结合强化学习,MPC可以利用学习到的环境模型进行预测,并基于预测结果进行决策优化。这种融合使得系统可以在面对不确定性时,通过与环境的持续交互来优化性能。
### 6.1.2 强化学习在多智能体系统中的应用
多智能体系统(Multi-Agent Systems, MAS)涉及多个交互的智能体,这为强化学习提出了新的挑战,例如智能体间的合作与竞争。通过深度学习,尤其是图神经网络(Graph Neural Networks, GNNs),强化学习算法能够更好地处理多智能体间的复杂交互,实现高效的协同或对抗策略。
## 6.2 强化学习的伦理和责任
强化学习在解决实际问题中,不可避免地会遇到伦理和责任问题。智能体的决策可能会带来意料之外的后果,因此探讨强化学习的伦理问题变得尤为重要。
### 6.2.1 机器决策的道德问题
智能体的自主决策可能与人类的价值观发生冲突,尤其是在涉及公平性、隐私保护和安全性等敏感问题时。设计道德的强化学习算法需要综合考虑多个维度的伦理原则,并在设计和训练过程中加以体现。
### 6.2.2 强化学习在现实世界中的约束和挑战
在现实世界中应用强化学习,面临的约束和挑战包括但不限于有限的数据、动态变化的环境、不确定性和安全性问题。为了使强化学习在现实世界中更加可靠和安全,需要对其进行严格的设计、测试和监管。
## 6.3 未来研究方向与潜力应用领域
深度强化学习的未来研究方向和潜在的应用领域广泛,以下是一些主要的研究趋势和应用前景。
### 6.3.1 无监督和半监督强化学习的发展
无监督学习和半监督学习提供了处理未标记数据的方法,这对于标注成本高昂的环境尤其有价值。通过无监督或半监督强化学习,智能体能够在没有明确奖励的情况下自主学习策略,这将大大扩展强化学习的应用范围。
### 6.3.2 强化学习在医疗、金融等领域的探索
在医疗领域,强化学习可以帮助设计个性化治疗方案,并优化医疗资源配置。在金融领域,强化学习能够用于算法交易、风险管理和欺诈检测等。这些应用不仅要求算法的高效性,还要求算法的透明度和可解释性。
本章节通过介绍强化学习与深度学习的融合趋势、强化学习面临的伦理问题,以及未来可能的研究方向和应用领域,旨在为读者提供一个全面的视角来理解强化学习的未来发展趋势。随着技术的不断进步和应用的日益深入,强化学习将在解决现实世界问题中扮演越来越重要的角色。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
这个专栏提供了 PyTorch 框架中强化学习的全面指南。从入门到高级技术,它涵盖了打造智能代理、环境搭建、策略梯度方法、实战案例、优化策略、状态表示和特征提取等方面。通过深入的分析和实战案例,这个专栏旨在帮助读者掌握 PyTorch 强化学习的精髓,并将其应用于解决实际问题。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PSS_E高级应用:专家揭秘模型构建与仿真流程优化
参考资源链接:[PSS/E程序操作手册(中文)](https://wenku.csdn.net/doc/6401acfbcce7214c316eddb5?spm=1055.2635.3001.10343)
# 1. PSS_E模型构建的理论基础
在探讨PSS_E模型构建的理论基础之前,首先需要理解其在电力系统仿真中的核心作用。PSS_E模型不仅是一个分析工具,它还是一种将理论与实践相结合、指导电力系统设计与优化的方法论。构建PSS_E模型的理论基础涉及多领域的知识,包括控制理论、电力系统工程、电磁学以及计算机科学。
## 1.1 PSS_E模型的定义和作用
PSS_E(Power Sys
【BCH译码算法深度解析】:从原理到实践的3步骤精通之路

参考资源链接:[BCH码编解码原理详解:线性循环码构造与多项式表示](https://wenku.csdn.net/doc/832aeg621s?spm=1055.2635.3001.10343)
# 1. BCH译码算法的基础理论
## 1.1
DisplayPort 1.4线缆和适配器选择秘籍:专家建议与最佳实践
参考资源链接:[display_port_1.4_spec.pdf](https://wenku.csdn.net/doc/6412b76bbe7fbd1778d4a3a1?spm=1055.2635.3001.10343)
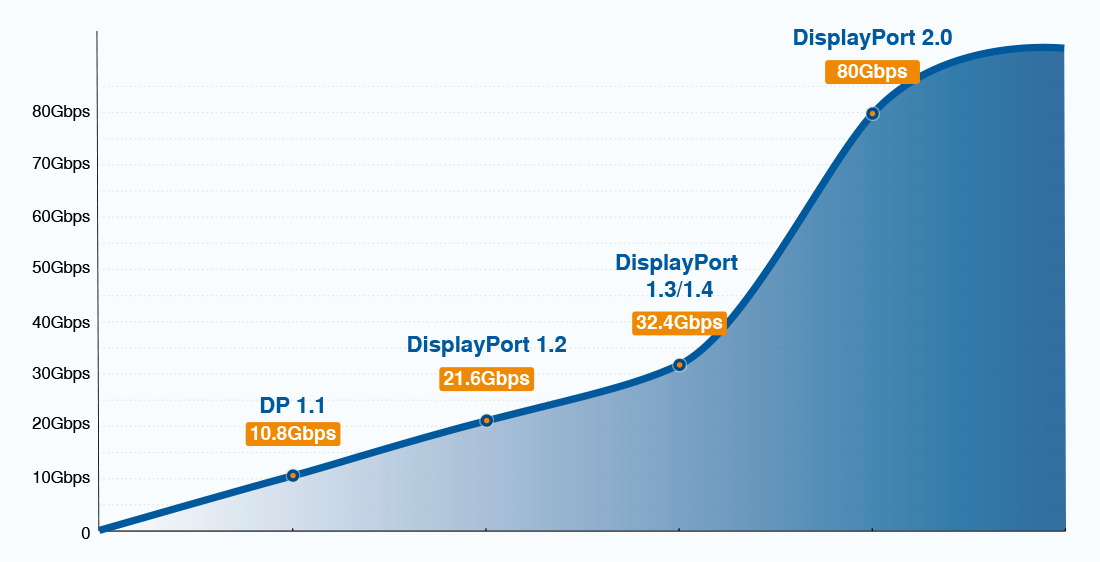
# 1. DisplayPort 1.4技术概述
随着显示技术的不断进步,DisplayPort 1.4作为一项重要的接
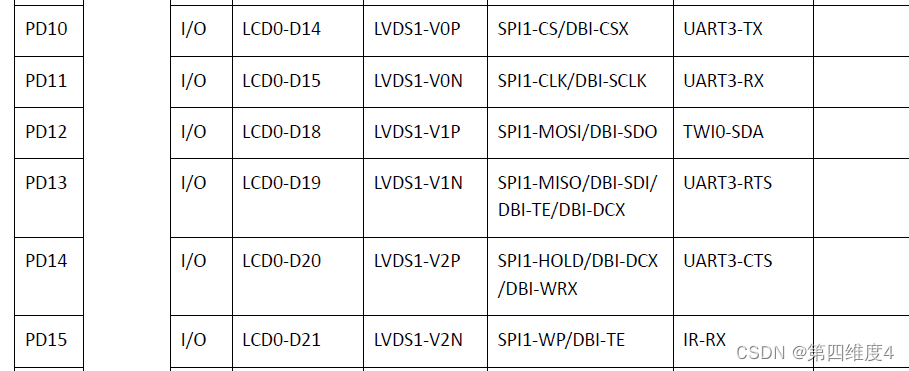
全志F133+JD9365液晶屏驱动配置入门指南:新手必读
参考资源链接:[全志F133+JD9365液晶屏驱动配置操作流程](https://wenku.csdn.net/doc/1fev68987w?spm=1055.2635.3001.10343)
# 1. 全志F133与JD9365液晶屏驱动概览
液晶屏作为现代显示设备的重要组成部分,其驱动程序的开发与优化直接影响到设备的显示效果和用户交互体验。全志F133处理器与JD9365液晶屏的组合,是工
【C语言输入输出高效实践】:提升用户体验的技巧大公开
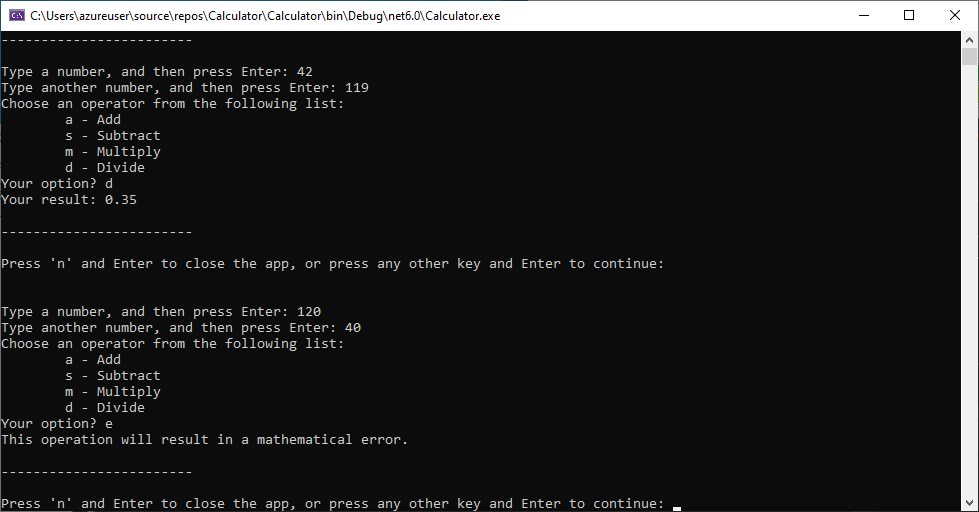
参考资源链接:[编写一个支持基本运算的简单计算器C程序](https://wenku.csdn.net/doc/4d7dvec7kx?spm=1055.2635.3001.10343)
# 1. C语言输入输出基础与原理
## 1.1 C语言输入输出概述
PowerBuilder性能优化全攻略:6.0_6.5版本性能飙升秘籍
参考资源链接:[PowerBuilder6.0/6.5基础教程:入门到精通](https://wenku.csdn.net/doc/6401abbfcce7214c316e959e?spm=1055.2635.3001.10343)
# 1. PowerBuilder基础与性能挑战
## 简介
PowerBuilder,一个由Sybase公司开发的应用程序开发工具,以其快速应用开发(RAD)的特性,成为了许多开发者的首选。然而
【体系结构与编程协同】:系统软件与硬件协同工作第六版指南
参考资源链接:[量化分析:计算机体系结构第六版课后习题解答](https://wenku.csdn.net/doc/644b82f6fcc5391368e5ef6b?spm=1055.2635.3001.10343)
# 1. 系统软件与硬件协同的基本概念
## 1.1 系统软件与硬件协同的重要性
在现代计算机系统中,系统软件与硬件的协同工作是提高计算机性能和效率的关键。系统软件包括操作系统、驱动
【故障排查大师】:FatFS错误代码全解析与解决指南

参考资源链接:[FatFS文件系统模块详解及函数用法](https://wenku.csdn.net/doc/79f2wogvkj?spm=1055.263
从零开始:构建ANSYS Fluent UDF环境的最佳实践
参考资源链接:[2020 ANSYS Fluent UDF定制手册(R2版)](https://wenku.csdn.net/doc/50fpnuzvks?spm=1055.2635.3001.10343)
# 1. ANSYS Fluent UDF基础知识概述
## 1.1 UDF的定义与用途
ANSYS Fluent UDF(User-Defined Functions)是一种允许用户通
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )