CAN总线通信的拓展性与可靠性优化方法
发布时间: 2024-04-12 18:12:34 阅读量: 73 订阅数: 96 

CAN总线远程传输可靠性的设计方法和实现

# 1. CAN总线通信基础
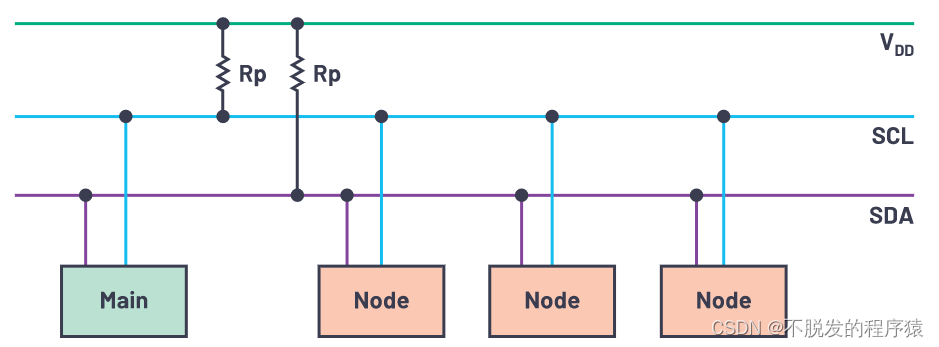
CAN总线通信作为一种广泛应用于实时控制领域的通信方式,具有高效、实时、可靠的特点。CAN总线通信协议定义了数据的传输格式,包括CAN帧结构、标识符和数据传输方式等,这些都是实现通信的基础。CAN总线通信的特点包括双线制、差分信号传输、优先级和冲突处理机制等。对于CAN总线通信的应用领域,主要涵盖了汽车领域和工控领域。在汽车电子系统中,CAN总线被广泛应用于车辆控制系统和行驶安全系统中。而在工控系统中,CAN总线则具有稳定性要求高、抗干扰能力强的特点。因此,了解CAN总线通信的基础知识对今后的深入学习和应用至关重要。
# 2. CAN总线通信的应用领域
CAN总线作为一种高效可靠的通信协议,在汽车和工控领域得到广泛应用。本章将深入探讨CAN总线在这两大领域中的具体应用场景和优势。
### 2.1 汽车领域中的CAN总线应用
在现代汽车中,CAN总线已成为连接各种电子控制单元的主要通信方式。它不仅提升了汽车系统之间的数据交换效率,也增强了车辆的智能化和安全性。以下将详细介绍CAN总线在汽车领域的应用情况。
#### 2.1.1 CAN总线在汽车电子系统中的作用
CAN总线在汽车电子系统中扮演着重要的角色,例如发动机控制单元、制动系统、空调系统等各个模块通过CAN总线实现数据传输和控制,使得这些模块之间可以实现高效协同工作。
```python
# 示例代码: 汽车发动机控制单元通过CAN总线发送引擎转速信息
def send_engine_speed():
engine_speed = get_engine_speed()
can_bus.send_message(ENGINE_CONTROL_UNIT_ID, engine_speed)
```
#### 2.1.2 汽车中常见的CAN总线网络拓扑结构
在汽车中,常见的CAN总线网络拓扑结构包括星型结构、总线结构和混合结构。其中,星型结构适用于多模块独立通信的场景,总线结构适用于同一总线上多个模块共享信息的场景,混合结构则结合了两者的优点。
```mermaid
graph LR
A[Engine Control Unit] -- CAN Bus --> B{Gateway}
B -- CAN Bus --> C[Body Control Module]
B -- CAN Bus --> D[Infotainment System]
```
#### 2.1.3 CAN总线在汽车行驶安全系统中的应用
在汽车行驶安全系统中,CAN总线承担着重要的安全监控和控制功能。例如,ABS、ESP等系统通过CAN总线实时获取车辆状态信息,并及时作出相应的控制动作,确保驾驶安全。
### 2.2 工控领域中的CAN总线应用
在工业控制系统中,CAN总线同样发挥着重要作用。工控系统对数据传输的稳定性和实时性要求较高,而CAN总线正是满足这些需求的理想选择。下面将深入探讨CAN总线在工控领域中的应用情况。
#### 2.2.1 工控系统中CAN总线的数据传输稳定性要求
工控系统通常对数据的传输稳定性要求极高,任何延迟或数据丢失都可能导致严重后果。CAN总线采用了差分信号传输和硬件层面的错误校验,保证了数据传输的可靠性和稳定性。
```python
# 示例代码: 工控系统中CAN总线数据发送函数
def send_can_data():
data = generate_data()
if can_bus.is_bus_off():
can_bus.recover_bus()
can_bus.send_data(data)
```
#### 2.2.2 CAN

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 CAN 协议的方方面面,从基本工作原理到高级特性。它涵盖了 CAN 数据帧的结构和解析、CAN 标识符的作用、CAN 仲裁过程、CRC 校验、CAN 控制器类型、CAN 总线速率设置、帧同步机制、错误处理策略、网络拓扑结构、在汽车电子系统中的应用、CAN FD 协议、消息过滤技术、远程帧和数据帧的应用场景、时间戳制度、速率自协商机制、CAN FD 与 ISO 11898-1 标准的关系、安全性分析和加密机制、通信拓展性和可靠性优化方法,以及与其他工控通信协议的比较和应用场景选择。本专栏旨在为读者提供对 CAN 协议的全面理解,使其能够在实际应用中有效地使用和部署 CAN 总线。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
掌握高效:洛雪音乐助手六音音源接口的5个实用技巧
# 摘要
洛雪音乐助手和六音音源接口是现代数字音乐体验的重要组成部分。本文全面概述了洛雪音乐助手及其六音音源接口的基础架构,详细解读了该接口的工作原理,包括其音频处理技术、核心功能和高级特性。此外,本文探讨了六音音源接口的配置与优化方法,实用技巧,以及如何在不同场景中应用。最后,文章展望了六音音源接口的未来创新方向、面临的挑战及机遇,并分析了其对
【HFSS仿真技巧】:传输线损耗计算的效率与精度提升
# 摘要
本文全面介绍了HFSS仿真软件在传输线损耗计算中的应用。首先概述了传输线损耗的理论基础,包括导体、介质和辐射损耗的类型及其影响因素。接着,详细探讨了HFSS仿真软件的工作原理和如何通过精确的参数设置来提高计算效率和精度。通过案例研究,分析了传统方法的局限性和实施高效仿真策略的必要性,并展示了精度验证与实际应用。最后,文章探索了进阶仿真技巧,如参数化建模、高级仿真功能以及人工智能和虚拟现实技术在仿真
【掌握CAN通讯协议】:为Windows 10_11驱动安装打下坚实基础
# 摘要
本论文深入探讨了CAN通讯协议的基础知识及其在不同平台下的实现方法。首先,本文阐述了CAN通讯协议的基本概念,随后详细介绍在Windows系统下CAN控制器的安装、配置和CAN接口编程的过程。其次,文章深入分析了CAN协议的数据封装、网络同步、时间管理以及网络管理策略,并针对常见错误提供了解决方案。此外,本文通过在汽车行业、工业控制和智能家居等不同领域的应用案例,展示了CA
【报警码快速解读】:汇川IS620P(N)系列伺服系统常见报警码解析与问题定位
# 摘要
本文对汇川IS620P(N)系列伺服系统进行了全面的概述,并详细介绍了报警码的基础知识。从报警码的定义、分类、生成机制,到报警码的显示与通知,本文系统地阐述了与报警码相关的各项核心内容。在此基础上,通过对常见报警码的解析和案例分析,提出了针对性的问题定位与解决策略,进而讨论了报警码管理的最佳实践。通过优化报警码记录与追踪,结合预防性维护,提出了系统优化的建议,旨在帮助工程师更高效地使用报警码功能,确保伺服系统的稳定运行。
# 关键字
伺服系统;报警码;故障诊断;参数管理;预防性维护;系统优化
参考资源链接:[汇川IS620P/N伺服系统故障排查与处理手册](https://wen
弱电数据中心季度巡检记录表:专家教你如何填写
# 摘要
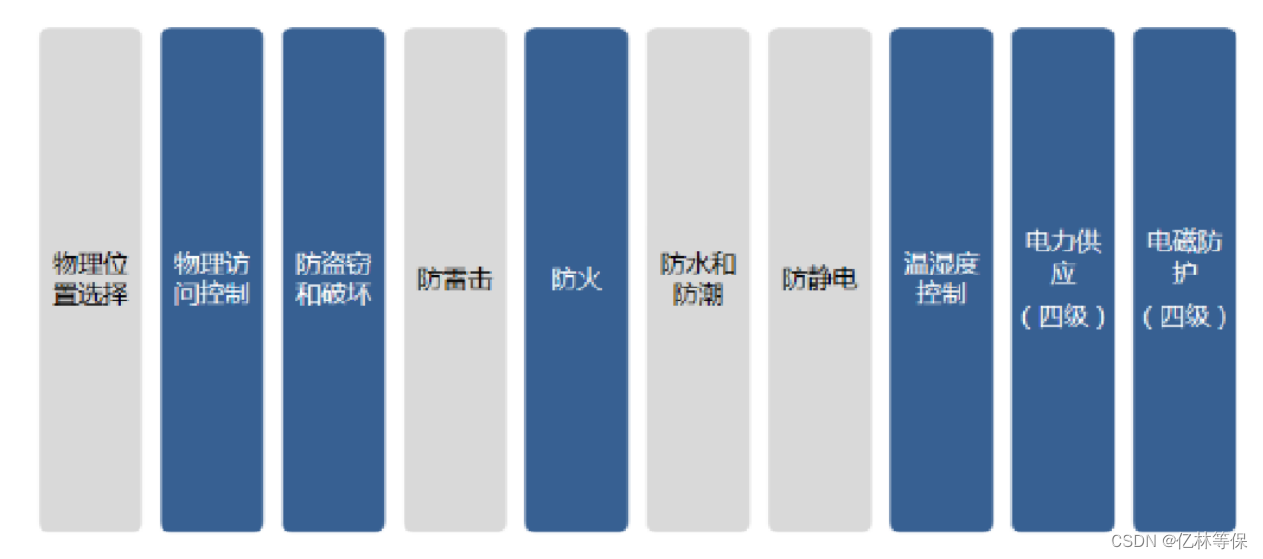
弱电数据中心巡检是确保数据处理和存储稳定运行的重要环节。本文首先概述了弱电数据中心巡检的重要性、目的和基本概念。接着,详细介绍了巡检前的准备工作,包括巡检工具与设备的准备、巡检人员的组织与培训,以及巡检计划的制定。然后,本文阐述了巡检内容的理论基础,涵盖了弱电系统的基础知识、数据中心的关键性能指标,以及巡检记录表的构成要素。随后,本文讨论了巡检记录表的填写实践,包括现场巡检流程操作、记录
【DAvE软件高级功能全攻略】:解锁隐藏潜力的终极指南
# 摘要
本文全面介绍了DAvE软件的各个方面,从基础概览、核心功能到集成、扩展应用,以及未来趋势。DAvE软件凭借其项目管理、代码编辑与调试、以及插件生态系统等功能,成为开发者不可或缺的工具。本文深入讨论了DAvE的安装配置、高级代码编辑技巧、依赖管理、性能分析优化,以及插件管理的最佳实践。同时,还探讨了如何搭建集成开发环境,实现自动化构建、部署和持续集成/持续部署(CI/CD)。高级测试、文档自动化、安全性强
绿联USB转RS232驱动安装优化手册:打造最兼容的系统设置

# 摘要
随着计算机硬件和软件技术的快速发展,USB转RS232适配器在多种应用场景中扮演着关键角色。本文首先介绍了USB转RS232适配器的基本概念和驱动程序的安装与配置方法,然后深入探讨了系统兼容性问题的诊断与解决,以及性能优化与故障排除的策略。通过理论分析和
【EDA软件蓝桥应用攻略】:设计流程优化,一步到位
# 摘要
本文全面介绍了EDA软件领域中蓝桥软件的应用,从软件概述到具体的设计流程及高级应用技巧进行了详尽分析。蓝桥软件的设计流程涉及前期准备工作、布局布线技术、多用户协作环境、实时数据同步与版本控制,以及自动化脚本的编写和流程优化。通过对电路设计、PCB设计和FPGA开发中的应用分析,展示了蓝桥软件在数据管理、布局布线策略及外部工具集成方
【Hibernate动态查询解决之道】:提升数据检索的敏捷性

# 摘要
Hibernate动态查询技术为Java持久层提供了强大的数据库交互能力,本论文详细介绍了Hibernate动态查询的基础理论、实践技巧及优化策略。文章首先概述了Hibernate框架和动态查询的基本概念,接着深入探讨了HQL和Criteria API的使用及其性能考量。实践技巧章节分享了基于这两种查询语言的实现方法和结果动态
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )