STM32单片机最小系统原理图与应用实践:从原理到实践,探索单片机系统应用
发布时间: 2024-07-05 06:30:14 阅读量: 92 订阅数: 33 

stm32单片机最小系统原理图
# 1. STM32单片机最小系统原理
### 1.1 STM32单片机简介
STM32单片机是意法半导体(STMicroelectronics)公司生产的一系列32位微控制器,基于ARM Cortex-M内核。STM32单片机具有高性能、低功耗、丰富的外设和广泛的应用领域等特点。
### 1.2 最小系统硬件组成
STM32单片机最小系统通常由以下硬件组成:
- STM32单片机
- 电源模块
- 复位电路
- 晶振
- LED指示灯
- 按键
- 串口接口
### 1.3 最小系统工作原理
STM32单片机最小系统的工作原理如下:
1. 电源模块为单片机供电。
2. 复位电路复位单片机,使单片机进入初始状态。
3. 晶振为单片机提供时钟信号,保证单片机正常工作。
4. LED指示灯用于指示单片机的工作状态。
5. 按键用于输入控制信号。
6. 串口接口用于与外部设备通信。
# 2. STM32单片机最小系统编程
### 2.1 C语言基础
C语言是一种通用的高级编程语言,广泛应用于嵌入式系统开发。STM32单片机最小系统编程主要使用C语言。
### 2.2 STM32单片机开发环境
STM32单片机开发环境主要包括编译器、调试器和集成开发环境(IDE)。常用的IDE有Keil MDK、IAR Embedded Workbench和STM32CubeIDE。
### 2.3 最小系统程序开发
#### 2.3.1 初始化函数
最小系统程序开发的第一步是初始化函数,通常在`main`函数中调用。初始化函数负责配置时钟、外设和变量。
```c
void SystemInit(void)
{
// 时钟配置
RCC_DeInit();
RCC_HSEConfig(RCC_HSE_ON);
while(RCC_GetFlagStatus(RCC_FLAG_HSERDY) == RESET);
RCC_PLLConfig(RCC_PLLSource_HSE, RCC_PLLMul_9);
RCC_HCLKConfig(RCC_SYSCLK_Div1);
RCC_PCLK2Config(RCC_HCLK_Div1);
RCC_PCLK1Config(RCC_HCLK_Div2);
// 外设配置
GPIO_DeInit(GPIOA);
GPIO_Init(GPIOA, GPIO_PIN_5, GPIO_MODE_OUT_PP, GPIO_SPEED_LOW, GPIO_PUPD_NOPULL);
// 变量初始化
ledState = 0;
}
```
#### 2.3.2 外设配置
外设配置函数负责配置STM32单片机的各个外设,如GPIO、定时器、串口等。
```c
void GPIO_Init(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_Mode_TypeDef GPIO_Mode, GPIO_Speed_TypeDef GPIO_Speed, GPIO_PuPd_TypeDef GPIO_PuPd)
{
// 检查GPIOx是否有效
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
// 检查GPIO_Pin是否有效
assert_param(IS_GPIO_PIN(GPIO_Pin));
// 检查GPIO_Mode是否有效
assert_param(IS_GPIO_MODE(GPIO_Mode));
// 检查GPIO_Speed是否有效
assert_param(IS_GPIO_SPEED(GPIO_Speed));
// 检查GPIO_PuPd是否有效
assert_param(IS_GPIO_PUPD(GPIO_PuPd));
// 配置GPIOx的模式、速度和上拉/下拉
GPIOx->MODER = (GPIOx->MODER & ~(0x3 << (GPIO_Pin * 2))) | (GPIO_Mode << (GPIO_Pin * 2));
GPIOx->OSPEEDR = (GPIOx->OSPEEDR & ~(0x3 << (GPIO_Pin * 2))) | (GPIO_Speed << (GPIO_Pin * 2));
GPIOx->PUPDR = (GPIOx->PUPDR & ~(0x3 << (GPIO_Pin * 2))) | (GPIO_PuPd << (GPIO_Pin * 2));
}
```
#### 2.3.3 主循环
主循环是程序的入口点,不断执行,直到系统复位。
```c
int main(void)
{
// 初始化系统
SystemInit();
// 主循环
while (1)
{
// LED控制
if (ledState == 0)
{
GPIO_SetBits(GPIOA, GPIO_PIN_5);
ledState = 1;
}
else
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 STM32 单片机最小系统原理图的设计和实现,旨在帮助开发者从零构建稳定高效的单片机系统。专栏内容涵盖了从原理讲解到实战指南,从常见问题解答到应用实践,从嵌入式操作系统到云端连接。通过深入剖析单片机架构、外设接口、系统时钟、存储器、中断处理、通信接口和调试技巧,读者可以全面掌握最小系统原理图的设计精髓,避免陷阱,确保系统稳定运行。专栏还提供了仿真实战案例和项目实战指南,帮助读者将理论知识转化为实际应用,打造出完整的单片机系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘雷达信号处理:从脉冲到频谱的魔法转换
# 摘要
本文对雷达信号处理技术进行了全面概述,从基础理论到实际应用,再到高级实践及未来展望进行了深入探讨。首先介绍了雷达信号的基本概念、脉冲编码以及时间域分析,然后深入研究了频谱分析在雷达信号处理中的基础理论、实际应用和高级技术。在高级实践方面,本文探讨了雷达信号的采集、预处理、数字化处理以及模拟与仿真的相关技术。最后,文章展望了人工智能、新兴技术对雷达信号处理带来的影响,以及雷达系统未来的发展趋势。本论文旨在为雷
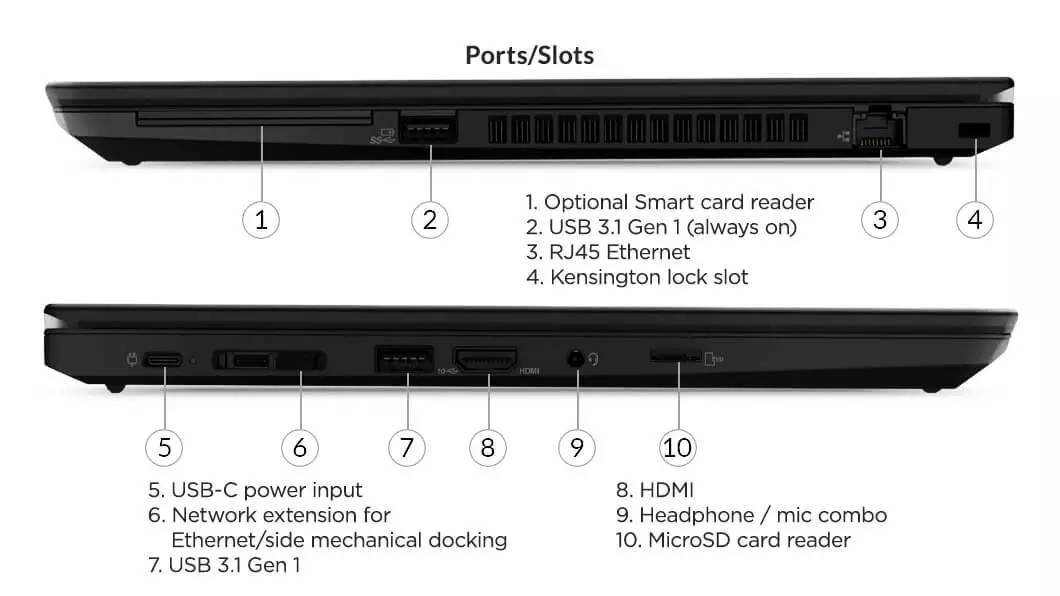
【ThinkPad T480s电路原理图深度解读】:成为硬件维修专家的必备指南
# 摘要
本文对ThinkPad T480s的硬件组成和维修技术进行了全面的分析和介绍。首先,概述了ThinkPad T480s的硬件结构,重点讲解了电路原理图的重要性及其在硬件维修中的应用。随后,详细探讨了电源系统的工作原理,主板电路的逻辑构成,以及显示系统硬件的组成和故障诊断。文章最后针对高级维修技术与工具的应用进行了深入讨论,包括
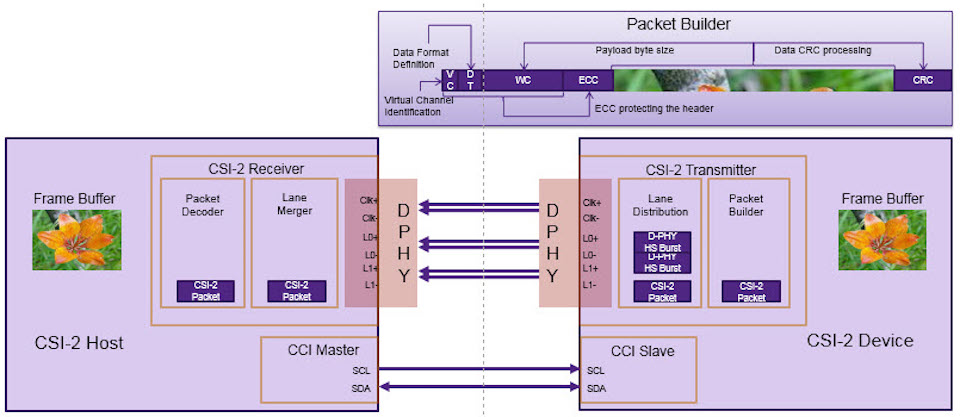
【移动行业处理器接口核心攻略】:MIPI协议全景透视
# 摘要
本文详细介绍了移动行业处理器接口(MIPI)协议的核心价值和技术原理,强调了其在移动设备中应用的重要性和优势。通过对MIPI协议标准架构、技术特点以及兼容性与演进的深入分析,本文展示了MIPI在相机、显示技术以及无线通信等方面的实用性和技术进步。此外,本文还探讨了MIPI协议的测试与调试方法,以及在智能穿戴设备、虚拟现实和增强
【编译器调优攻略】:深入了解STM32工程的编译优化技巧
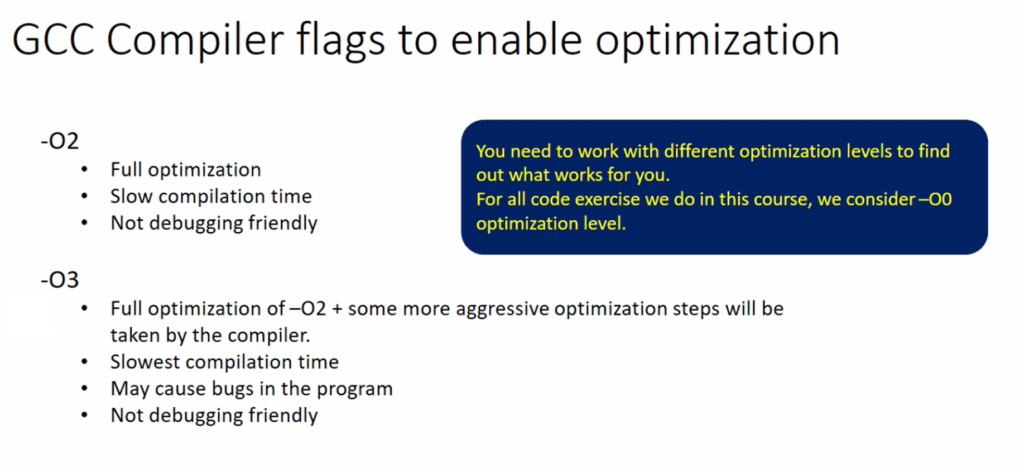
# 摘要
本文深入探讨了STM32工程优化的各个方面,从编译器调优的理论基础到具体的编译器优化选项,再到STM32平台的特定优化。首先概述了编译器调优和STM32工程优化的理论基础,然后深入到代码层面的优化策略,包括高效编程实践、数据存取优化和预处理器的巧妙使用。接着,文章分析了编译器优化选项的重要性,包括编译器级别和链接器选项的影响,以及如何在构建系统中集成这些优化。最后,文章详
29500-2标准成功案例:组织合规性实践剖析

# 摘要
本文全面阐述了29500-2标准的内涵、合规性概念及其在组织内部策略构建中的应用。文章首先介绍了29500-2标准的框架和实施原则,随后探讨了
S7-1200_S7-1500故障排除宝典:维护与常见问题的解决方案

# 摘要
本文综述了S7-1200/S7-1500 PLC的基础知识和故障诊断技术。首先介绍PLC的硬件结构和功能,重点在于控制器核心组件以及I/O模块和接口类型。接着分析电源和接地问题,探讨其故障原因及解决方案。本文详细讨论了连接与接线故障的诊断方法和常见错误。在软件故障诊断方面,强调了程序错误排查、系统与网络故障处理以及数
无人机精准控制:ICM-42607在定位与姿态调整中的应用指南
# 摘要
无人机精准控制对于飞行安全与任务执行至关重要,但面临诸多挑战。本文首先分析了ICM-42607传感器的技术特点,探讨了其在无人机控制系统中的集成与通信协议。随后,本文深入阐述了定位与姿态调整的理论基础,包括无人机定位技术原理和姿态估计算法。在此基础上,文章详细讨论了ICM-42607在无人机定位与姿态调整中的实际应用,并通
易语言与FPDF库:错误处理与异常管理的黄金法则

# 摘要
易语言作为一门简化的编程语言,其与FPDF库结合使用时,错误处理变得尤为重要。本文旨在深入探讨易语言与FPDF库的错误处理机制,从基础知识、理论与实践,到高级技术、异常管理策略,再到实战演练与未来展望。文章详细介绍了错误和异常的概念、重要性及处理方法,并结合FPDF库的特点,讨论了设计时与运行时的错误类型、自定义与集成第三方的异常处理工具,以及面向对象中的错误处理。此外,本文还强
Linux下EtherCAT主站igh程序同步机制:实现与优化指南
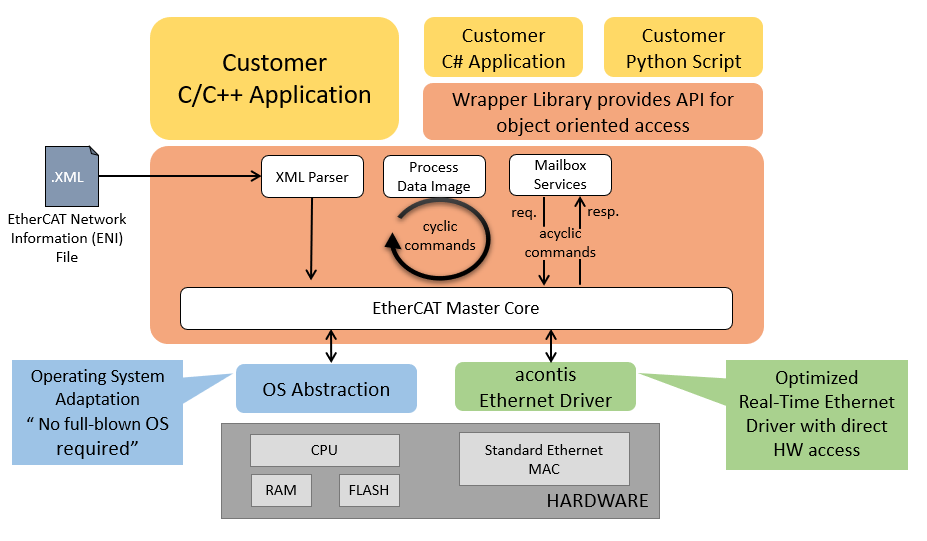
# 摘要
本文首先概述了EtherCAT技术及其同步机制的基本概念,随后详细介绍了在Linux环境下开发EtherCAT主站程序的基础知识,包括协议栈架构和同步机制的角色,以及Linux环境下的实时性强化和软件工具链安装。在此基础上,探讨了同步机制在实际应用中的实现、同步误差的控制与测量,以及同步优化策略。此外,本文还讨论了多任务同步的高级应用、基于时间戳的同步实现、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )