OpenCV图像识别进阶指南:图像分割、特征提取与目标检测
发布时间: 2024-08-07 04:05:36 阅读量: 95 订阅数: 26 

免费的防止锁屏小软件,可用于域统一管控下的锁屏机制
# 1. OpenCV图像识别概述
OpenCV(Open Source Computer Vision Library)是一个开源计算机视觉库,提供广泛的图像处理和分析算法。图像识别是计算机视觉的一个分支,它涉及识别和理解图像中的对象。OpenCV提供了强大的工具和函数,使开发人员能够构建复杂的图像识别系统。
图像识别在各种应用中发挥着至关重要的作用,例如人脸识别、物体检测、场景理解和医疗成像。通过利用OpenCV的强大功能,开发人员可以创建高效且准确的图像识别系统,从而推动各个行业的创新。
# 2. 图像分割技术
### 2.1 图像分割的基本概念
图像分割是将图像分解为具有相似特征的独立区域的过程。这些区域可以基于颜色、纹理、强度或其他视觉特性。图像分割对于许多计算机视觉任务至关重要,例如目标检测、图像分类和场景理解。
### 2.2 基于阈值的分割
基于阈值的分割是最简单、最常用的图像分割技术之一。它通过将图像像素的强度与给定的阈值进行比较来工作。
#### 2.2.1 全局阈值分割
全局阈值分割使用单个阈值将图像中的所有像素分为两类:前景和背景。前景像素的强度高于阈值,而背景像素的强度低于阈值。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值
threshold = 127
# 执行全局阈值分割
ret, thresh = cv2.threshold(gray, threshold, 255, cv2.THRESH_BINARY)
# 显示分割后的图像
cv2.imshow('Segmented Image', thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.threshold()` 函数使用 `THRESH_BINARY` 阈值类型,将高于阈值的像素设置为 255(白色),低于阈值的像素设置为 0(黑色)。
* `ret` 变量存储阈值操作的返回值,`thresh` 变量存储分割后的图像。
#### 2.2.2 局部阈值分割
局部阈值分割使用图像中不同区域的动态阈值。它考虑了图像的局部特性,例如照明变化。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 计算局部阈值
local_thresh = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2)
# 显示分割后的图像
cv2.imshow('Segmented Image', local_thresh)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.adaptiveThreshold()` 函数使用 `ADAPTIVE_THRESH_GAUSSIAN_C` 方法计算局部阈值。它考虑了图像的局部均值和标准差。
* `blockSize` 参数指定了计算局部阈值时使用的邻域大小。
* `C` 参数指定了从局部均值中减去的常数。
### 2.3 基于区域的分割
基于区域的分割将图像分割为具有相似特征的连接区域。这些区域通常基于颜色、纹理或强度相似性。
#### 2.3.1 连通域分割
连通域分割将图像中的相邻像素分组为连通域。连通域是具有相同特征的像素组,它们在水平、垂直或对角线上相邻。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 执行连通域分割
segmented, labels = cv2.connectedComponents(gray)
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.connectedComponents()` 函数将图像分割为连通域,并返回分割后的图像和每个连通域的标签。
* `segmented` 变量存储分割后的图像,`labels` 变量存储每个连通域的标签。
#### 2.3.2 分水岭分割
分水岭分割将图像视为地形,其中像素强度表示高度。它将图像分割为不同高度区域的流域。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 执行分水岭分割
segmented = cv2.watershed(gray)
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.watershed()` 函数使用分水岭算法将图像分割为流域。
* `segmented` 变量存储分割后的图像,其中每个流域由不同的标签表示。
### 2.4 基于边缘的分割
基于边缘的分割将图像分割为具有不同强度梯度的区域。它检测图像中的边缘,并将图像分割为这些边缘之间的区域。
#### 2.4.1 Canny边缘检测
Canny边缘检测是一种流行的边缘检测算法,它使用高斯滤波器平滑图像,然后使用 Sobel 算子计算图像梯度。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 执行 Canny 边缘检测
edges = cv2.Canny(gray, 100, 200)
# 显示边缘检测后的图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.Canny()` 函数使用 Canny 算法检测图像中的边缘。
* `100` 和 `200` 是 Canny 算法中使用的两个阈值。
* `edges` 变量存储检测到的边缘图像。
#### 2.4.2 Sobel边缘检测
Sobel边缘检测是一种边缘检测算法,它使用卷积核来计算图像梯度。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 执行 Sobel 边缘检测
sobelx = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=5)
sobely = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=5)
# 计算边缘幅度
edges = np.sqrt(sobelx**2 + sobely**2)
# 显示边缘检测后的图像
cv2.imshow('Edges', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.Sobel()` 函数使用 Sobel 算子计算图像梯度。
* `ksize` 参数指定了 Sobel 算子的大小。
* `sobelx` 和 `sobely` 变量分别存储水平和垂直梯度图像。
* `edges` 变量存储计算出的边缘幅度图像。
# 3. 特征提取技术
### 3.1 特征提取概述
特征提取是计算机视觉中至关重要的一步,其目的是从图像中提取出能够有效表征其内容的特征。这些特征可以用来进行图像匹配、分类、检测和识别等任务。
### 3.2 局部特征描述子
局部特征描述子专注于提取图像中特定区域的特征。它们通常对图像的局部变化(如光照、旋转和尺度)具有鲁棒性。
#### 3.2.1 SIFT特征
尺度不变特征变换(SIFT)是一种广泛使用的局部特征描述子。它通过在图像中检测关键点(即兴趣点)并计算其周围区域的梯度方向直方图来工作。SIFT特征对尺度和旋转变化具有鲁棒性,使其适用于各种图像识别任务。
**代码块:**
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 创建SIFT特征提取器
sift = cv2.SIFT_create()
# 检测关键点和描述子
keypoints, descriptors = sift.detectAndCompute(image, None)
# 可视化关键点
cv2.drawKeypoints(image, keypoints, image)
cv2.imshow('SIFT Keypoints', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.SIFT_create()`创建SIFT特征提取器。
* `detectAndCompute()`函数检测图像中的关键点并计算其描述子。
* `drawKeypoints()`函数可视化关键点。
#### 3.2.2 SURF特征
加速稳健特征(SURF)是一种SIFT的变体,它通过使用积分图像和近似近邻搜索来提高计算效率。SURF特征也对尺度和旋转变化具有鲁棒性。
**代码块:**
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 创建SURF特征提取器
surf = cv2.SURF_create()
# 检测关键点和描述子
keypoints, descriptors = surf.detectAndCompute(image, None)
# 可视化关键点
cv2.drawKeypoints(image, keypoints, image)
cv2.imshow('SURF Keypoints', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**逻辑分析:**
* `cv2.SURF_create()`创建SURF特征提取器。
* `detectAndCompute()`函数检测图像中的关键点并计算其描述子。
* `drawKeypoints()`函数可视化关键点。
### 3.3 全局特征描述子
全局特征描述子提取整个图像的特征,而不是特定区域。它们通常用于图像分类和检索任务。
#### 3.3.1 HOG特征
直方图梯度(HOG)特征是一种基于图像梯度方向直方图的全局特征描述子。它对图像的形状和纹理具有鲁棒性。HOG特征广泛用于行人检测和车辆识别等任务。
**代码块:**
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 创建HOG特征提取器
hog = cv2.HOGDescriptor()
# 计算HOG描述子
descriptor = hog.compute(image)
# 打印HOG描述子
print(descriptor)
```
**逻辑分析:**
* `cv2.HOGDescriptor()`创建HOG特征提取器。
* `compute()`函数计算图像的HOG描述子。
#### 3.3.2 LBP特征
局部二值模式(LBP)特征是一种基于图像像素值局部比较的全局特征描述子。它对图像的纹理和形状具有鲁棒性。LBP特征广泛用于人脸识别和纹理分析等任务。
**代码块:**
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 创建LBP特征提取器
lbp = cv2.xfeatures2d.LBP_create()
# 计算LBP描述子
descriptor = lbp.compute(image)
# 打印LBP描述子
print(descriptor)
```
**逻辑分析:**
* `cv2.xfeatures2d.LBP_create()`创建LBP特征提取器。
* `compute()`函数计算图像的LBP描述子。
### 3.4 特征匹配与相似性度量
特征提取后,需要进行特征匹配以确定图像之间的相似性。常用的相似性度量包括:
* 欧氏距离
* 曼哈顿距离
* 余弦相似度
**代码块:**
```python
import numpy as np
# 计算欧氏距离
def euclidean_distance(feature1, feature2):
return np.sqrt(np.sum((feature1 - feature2) ** 2))
# 计算曼哈顿距离
def manhattan_distance(feature1, feature2):
return np.sum(np.abs(feature1 - feature2))
# 计算余弦相似度
def cosine_similarity(feature1, feature2):
return np.dot(feature1, feature2) / (np.linalg.norm(feature1) * np.linalg.norm(feature2))
```
**逻辑分析:**
* `euclidean_distance()`函数计算两个特征之间的欧氏距离。
* `manhattan_distance()`函数计算两个特征之间的曼哈顿距离。
* `cosine_similarity()`函数计算两个特征之间的余弦相似度。
# 4. 目标检测技术
### 4.1 目标检测概述
目标检测是计算机视觉中的一项基本任务,其目的是在图像或视频中定位和识别感兴趣的对象。与图像分类不同,目标检测需要同时确定对象的类别和位置。
目标检测算法通常分为两类:
- **两阶段检测器:**首先生成候选区域,然后对每个候选区域进行分类。
- **单阶段检测器:**直接从图像中预测对象的类别和位置。
### 4.2 滑动窗口检测器
#### 4.2.1 传统滑动窗口检测器
传统滑动窗口检测器使用一个预定义大小的窗口在图像上滑动。对于每个窗口位置,提取特征并将其输入分类器以确定窗口是否包含对象。如果包含,则输出窗口的位置和对象的类别。
**优点:**
- 简单且易于实现。
- 对于形状规则的对象效果良好。
**缺点:**
- 计算成本高,因为需要对图像中的每个位置进行特征提取和分类。
- 对于形状不规则或大小差异较大的对象效果不佳。
#### 4.2.2 滑动窗口检测器的改进
为了解决传统滑动窗口检测器的缺点,提出了各种改进方法:
- **金字塔滑动窗口:**使用不同大小的滑动窗口来处理不同大小的对象。
- **选择性搜索:**使用图像分割算法生成候选区域,然后在候选区域上应用滑动窗口检测器。
- **深度学习特征提取:**使用卷积神经网络(CNN)从图像中提取特征,从而提高检测精度。
### 4.3 基于区域的检测器
#### 4.3.1 R-CNN检测器
R-CNN检测器是一种两阶段检测器,它首先使用选择性搜索算法生成候选区域。然后,对每个候选区域提取特征并输入到分类器中以确定其类别。最后,使用回归器微调候选区域的位置。
**优点:**
- 检测精度高。
- 能够处理形状不规则和大小差异较大的对象。
**缺点:**
- 计算成本非常高。
- 训练过程复杂且耗时。
#### 4.3.2 Fast R-CNN检测器
Fast R-CNN检测器对R-CNN检测器进行了改进,它使用共享卷积层同时提取所有候选区域的特征。这大大降低了计算成本。
**优点:**
- 比R-CNN检测器快得多。
- 仍然保持较高的检测精度。
**缺点:**
- 训练过程仍然复杂且耗时。
#### 4.3.3 Faster R-CNN检测器
Faster R-CNN检测器进一步改进了Fast R-CNN检测器,它使用区域提议网络(RPN)生成候选区域。RPN是一个轻量级网络,可以快速高效地生成候选区域。
**优点:**
- 比Fast R-CNN检测器快得多。
- 仍然保持较高的检测精度。
- 训练过程更加简单。
### 4.4 单次镜头检测器
#### 4.4.1 YOLO检测器
YOLO检测器是一种单阶段检测器,它直接从图像中预测对象的类别和位置。YOLO检测器使用一个卷积神经网络来处理整个图像,并输出一个特征图,其中每个单元格包含一个对象的类别和位置信息。
**优点:**
- 非常快,可以实时处理图像。
- 能够检测多个对象。
**缺点:**
- 检测精度低于两阶段检测器。
- 对于小对象或重叠对象效果不佳。
#### 4.4.2 SSD检测器
SSD检测器也是一种单阶段检测器,它使用一系列卷积层和池化层来处理图像。每个卷积层输出一个特征图,其中每个单元格包含一个对象的类别和位置信息。
**优点:**
- 比YOLO检测器快。
- 检测精度高于YOLO检测器。
**缺点:**
- 检测精度低于两阶段检测器。
- 对于小对象或重叠对象效果不佳。
# 5.1 人脸识别
人脸识别是图像识别领域中的一项重要应用,它涉及到人脸检测和人脸识别两个主要步骤。
### 5.1.1 人脸检测
人脸检测的目标是确定图像中是否存在人脸,以及人脸的位置。OpenCV提供了多种人脸检测算法,其中最常用的算法是Haar级联分类器。
```python
import cv2
# 加载Haar级联分类器
face_cascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
# 读取图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 人脸检测
faces = face_cascade.detectMultiScale(gray, 1.1, 4)
# 绘制矩形框
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示图像
cv2.imshow('Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 5.1.2 人脸识别
人脸识别是指识别图像中特定个体身份的过程。OpenCV提供了多种人脸识别算法,其中最常用的算法是局部二值模式直方图(LBP)。
```python
import cv2
import numpy as np
# 加载LBP人脸识别器
recognizer = cv2.face.LBPHFaceRecognizer_create()
# 训练人脸识别器
recognizer.train(faces, np.array(labels))
# 识别图像中的人脸
label, confidence = recognizer.predict(gray)
# 显示识别结果
print("识别结果:", label)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《OpenCV图像识别》专栏是一份全面的指南,涵盖图像识别的各个方面。它从入门指南开始,逐步指导读者掌握图像识别黑科技。进阶指南深入探讨图像分割、特征提取和目标检测。此外,专栏还提供了优化算法、医疗、安防、工业、交通、零售、金融、农业、教育、游戏、机器人、生物识别、遥感和文物保护等领域的实际应用。通过学习本专栏,读者将获得在各种行业中利用OpenCV图像识别技术的知识和技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
FA-M3 PLC程序优化秘诀:提升系统性能的10大策略
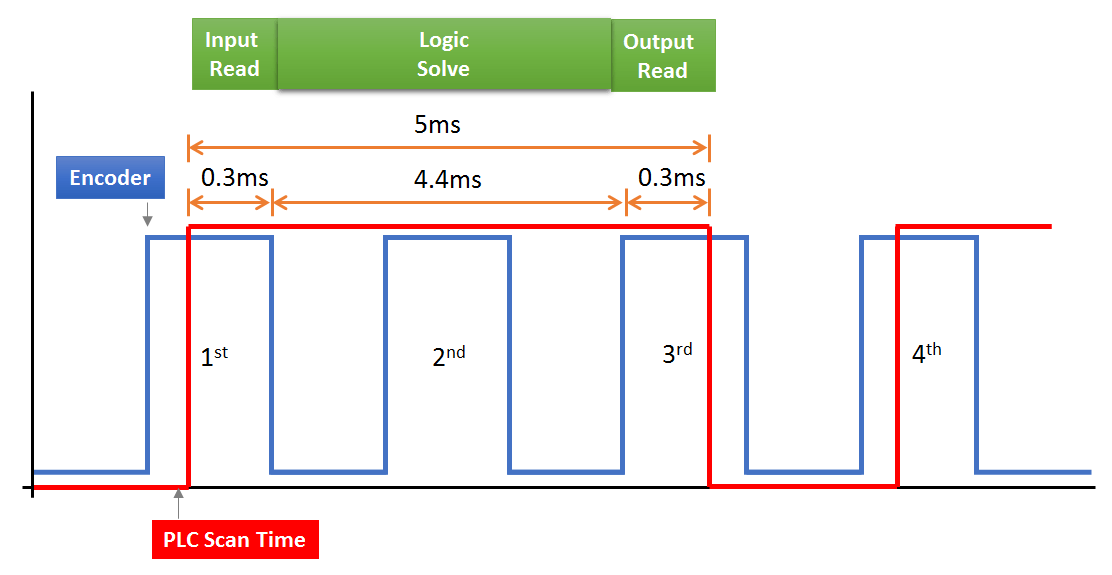
# 摘要
本文对FA-M3 PLC的基础性能标准和优化方法进行了全面探讨。首先介绍了PLC的基本概念和性能指标,随后深入分析了程序结构优化策略,包括模块化设计、逻辑编程改进以及规范化和标准化过程。在数据处理与管理方面,讨论了数据管理策略、实时数据处理技术和数据通讯优化。此外,还探讨了系统资源管理,涵盖硬件优化、软件资源分配和能效优化。最后,文章总结了PLC的维护与故障诊断策
【ZYNQ_MPSoc启动秘籍】:深入解析qspi+emmc协同工作的5大原理
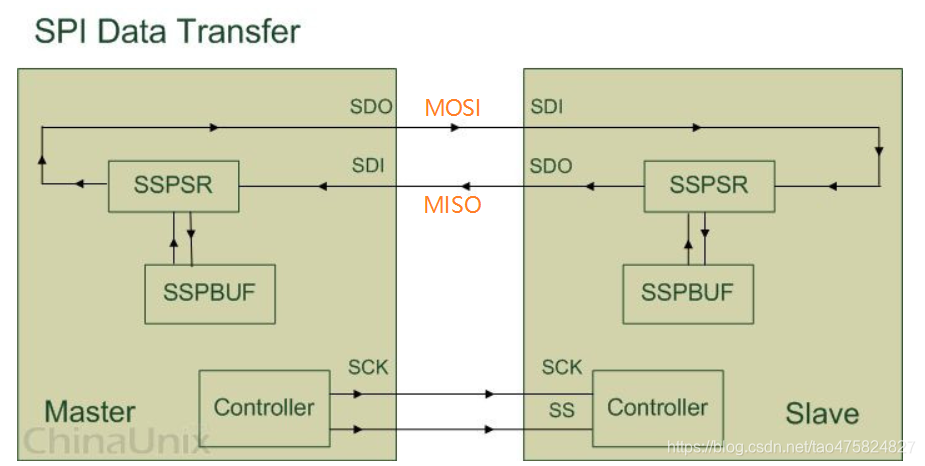
# 摘要
本文介绍了ZYNQ MPSoc的启动过程以及QSPI闪存和EMMC存储技术的基础知识和工作原理。在对QSPI闪
深入解析Saleae 16:功能与应用场景全面介绍
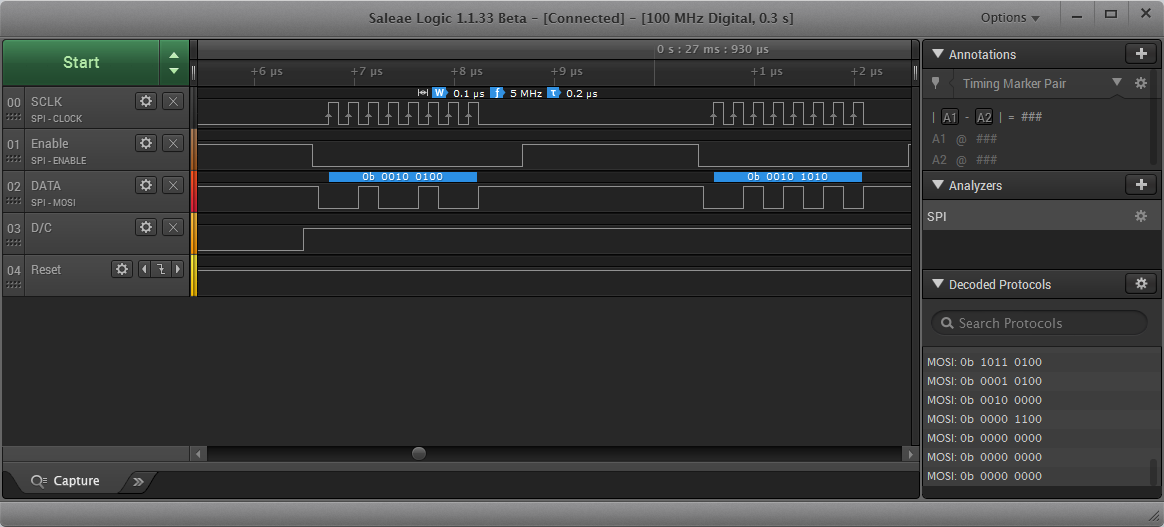
# 摘要
本文对Saleae 16这一多功能逻辑分析仪进行了全面介绍,重点探讨了其硬件规格、技术细节以及软件使用和分析功能。通过深入了解Saleae 16的物理规格、支持的协议与接口,以及高速数据捕获和信号完整性等核心特性,本文提供了硬件设备在不同场景下应用的案例分析。此外,本文还涉及了设备的软件界面、数据捕获与分析工具,并展望了Saleae 16在行业特定解决方案中的应用及
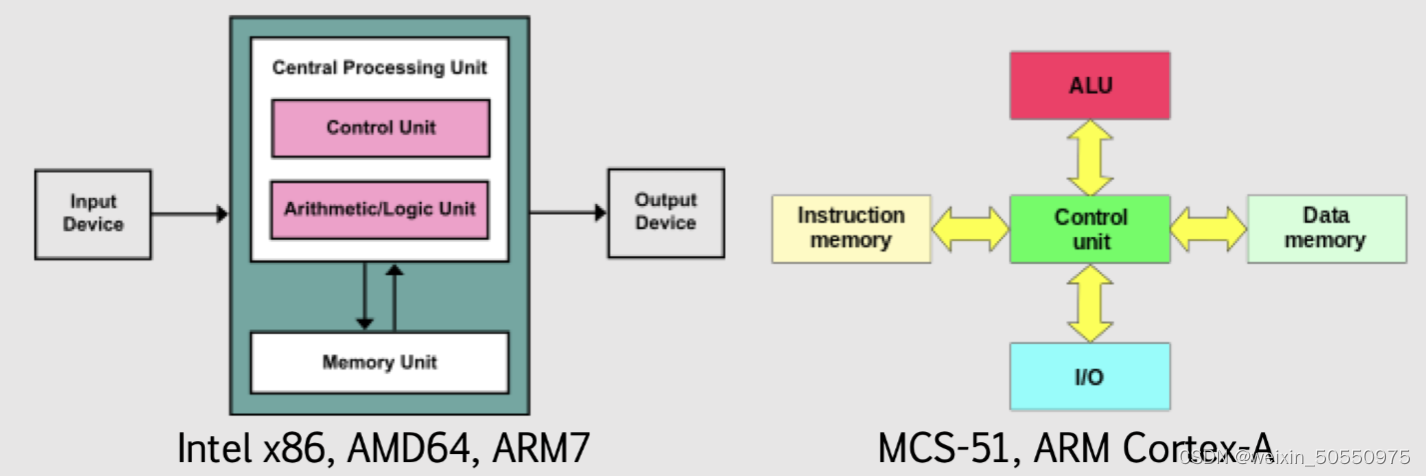
【计算机组成原理精讲】:从零开始深入理解计算机硬件
# 摘要
本文全面介绍了计算机组成的原理、数据的表示与处理、存储系统、中央处理器(CPU)设计以及系统结构与性能优化的现代技术。从基本的数制转换到复杂的高速缓冲存储器设计,再到CPU的流水线技术,文章深入阐述了关键概念和设计要点。此外,本文还探讨了现代计算机体系结构的发展,性能评估标准,以及如何通过软硬件协同设计来优化系统性能。计算机组成原理在云计算、人工智能和物联网等现代技术应用中的角色也被分析,旨在展示其在支撑未来技术进
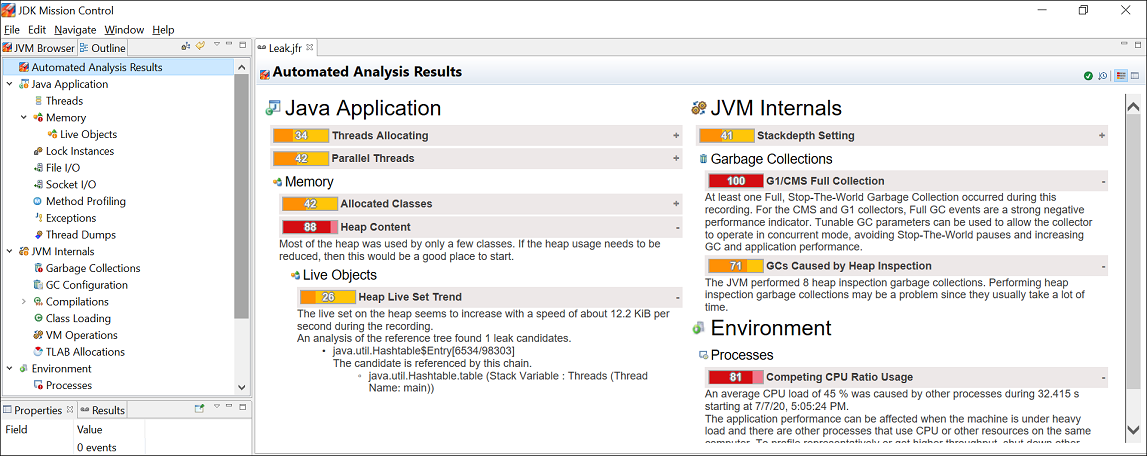
ObjectArx内存管理艺术:高效技巧与防泄漏的最佳实践
# 摘要
本文主要对ObjectArx的内存管理进行了全面的探讨。首先介绍了内存管理的基础知识,包括内存分配与释放的机制、常见误区以及内存调试技术。接着,文章深入讨论了高效内存管理技巧,如内存池、对象生命周期管理、内存碎片优化和内存缓存机制。在第四章,作者分享了防止内存泄漏的实践技巧,涉及设计模式、自动内存管理工具和面
【IT系统性能优化全攻略】:从基础到实战的19个实用技巧

# 摘要
随着信息技术的飞速发展,IT系统性能优化成为确保业务连续性和提升用户体验的关键因素。本文首先概述了性能优化的重要性与基本概念,然后深入探讨了
【C++ Builder 6.0 语法速成】:2小时快速掌握C++编程关键点

# 摘要
本文全面介绍C++ Builder 6.0的开发环境设置、基础语法、高级特性、VCL组件编程以及项目实战应用,并对性能优化与调试技巧进行
【FFT实战案例】:MATLAB信号处理中FFT的成功应用
# 摘要
快速傅里叶变换(FFT)是数字信号处理领域的核心技术,它在理论和实践上都有着广泛的应用。本文首先介绍了FFT的基本概念及其数学原理,探讨了其算法的高效性,并在MATLAB环境下对FFT函数的工作机制进行了详细阐述。接着,文章深入分析了FFT在信号处理中的实战应用,包括信号去噪、频谱分析以及调制解调技术。进一步地,本文探讨了FF
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )