【步进电机控制秘笈】:单片机驱动步进电机实战指南
发布时间: 2024-07-15 09:47:38 阅读量: 138 订阅数: 36 
# 1. 步进电机基础理论**
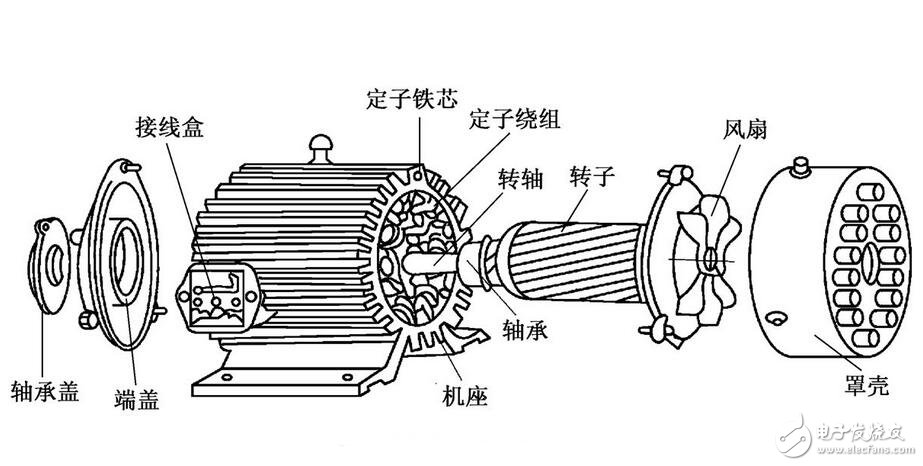
步进电机是一种将电脉冲信号转换为角位移或线位移的执行器。它具有步距角小、精度高、响应快、控制方便等优点。
步进电机的基本原理是基于电磁感应。当电流通过电机线圈时,会在线圈周围产生磁场。当改变线圈中的电流方向或大小时,磁场也会随之改变。通过改变线圈中的电流顺序,可以控制电机的转子旋转。
# 2. 单片机步进电机驱动技术
### 2.1 单片机控制原理
#### 2.1.1 步进电机驱动原理
步进电机是一种将电脉冲信号转换为机械角位移的电机。其工作原理是:当向步进电机线圈组输入脉冲信号时,线圈组会产生磁场,并与转子上的永磁体相互作用,从而产生转矩,使转子按一定角度旋转。
#### 2.1.2 单片机驱动架构
单片机驱动步进电机通常采用以下架构:
- 单片机:负责生成控制脉冲信号和执行控制算法。
- 驱动器:负责放大单片机输出的脉冲信号,并驱动步进电机。
- 电机:将电脉冲信号转换为机械角位移。
### 2.2 单片机驱动算法
#### 2.2.1 步进脉冲生成
步进脉冲生成算法负责产生驱动步进电机所需的脉冲信号。常见的算法有:
- 全步进:每一步脉冲使电机转动一个步距角。
- 半步进:每一步脉冲使电机转动半个步距角,精度更高。
#### 2.2.2 电流控制算法
电流控制算法负责控制流过步进电机线圈的电流,从而实现对电机转矩的控制。常见的算法有:
- 恒流控制:保持流过线圈的电流恒定,从而获得稳定的转矩。
- 斩波控制:通过周期性地切换线圈电流,降低电机发热和噪音。
#### 2.2.3 速度控制算法
速度控制算法负责控制步进电机的转速。常见的算法有:
- 开环控制:根据给定的脉冲频率直接控制电机转速,精度较低。
- 闭环控制:使用速度传感器反馈实际转速,并调整脉冲频率以实现精确的转速控制。
### 代码示例
以下代码示例演示了单片机生成步进脉冲的算法:
```c
#define STEP_COUNT 200 // 步进数
int main() {
// 初始化单片机引脚
...
// 循环生成步进脉冲
for (int i = 0; i < STEP_COUNT; i++) {
// 根据步进算法生成脉冲信号
...
// 输出脉冲信号
...
// 延时一段时间
...
}
return 0;
}
```
**逻辑分析:**
该代码循环生成指定数量的步进脉冲。首先初始化单片机引脚,然后根据步进算法生成脉冲信号并输出。最后,延时一段时间以确保电机有足够的时间响应脉冲。
**参数说明:**
- `STEP_COUNT`:要生成的步进脉冲数。
# 3. 步进电机驱动实战
### 3.1 硬件电路设计
#### 3.1.1 电机驱动电路
电机驱动电路主要负责为步进电机提供驱动电流,实现电机的转动。常见的电机驱动电路有:
- **H桥驱动电路:**使用四个功率MOSFET或IGBT组成H桥结构,通过控制MOSFET的导通和关断,实现电机的正反转和制动。
- **全桥驱动电路:**使用四个功率MOSFET或IGBT组成全桥结构,比H桥驱动电路具有更高的效率和更小的发热。
- **单极性驱动电路:**使用单极性电源供电,通过控制一个MOSFET的导通和关断,实现电机的正反转。
**代码块:**
```c++
// H桥驱动电路代码示例
void Hbridge_Drive(int dir, int speed)
{
if (dir == 0) // 正转
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); // IN1置高
GPIO_ResetBits(GPIOB, GPIO_Pin_13); // IN2置低
}
else if (dir == 1) // 反转
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); // IN1置低
GPIO_SetBits(GPIOB, GPIO_Pin_13); // IN2置高
}
else // 制动
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); // IN1置低
GPIO_ResetBits(GPIOB, GPIO_Pin_13); // IN2置低
}
TIM_SetCompare1(TIM3, speed); // 设置PWM占空比控制电机速度
}
```
**逻辑分析:**
该代码实现了H桥驱动电路的控制,根据输入的dir(方向)和speed(速度)参数,控制电机的正反转和制动。TIM_SetCompare1函数用于设置PWM占空比,从而控制电机的速度。
#### 3.1.2 单片机接口电路
单片机接口电路负责将单片机与电机驱动电路连接起来,实现单片机对电机驱动电路的控制。常见的单片机接口电路有:
- **GPIO接口:**使用单片机的GPIO引脚直接控制电机驱动电路的输入输出信号。
- **UART接口:**使用单片机的UART接口与电机驱动电路进行串行通信。
- **I2C接口:**使用单片机的I2C接口与电机驱动电路进行串行通信。
**代码块:**
```c++
// GPIO接口控制电机驱动电路代码示例
void GPIO_Control_Motor(int dir, int speed)
{
if (dir == 0) // 正转
{
GPIO_SetBits(GPIOB, GPIO_Pin_12); // IN1置高
}
else // 反转
{
GPIO_ResetBits(GPIOB, GPIO_Pin_12); // IN1置低
}
TIM_SetCompare1(TIM3, speed); // 设置PWM占空比控制电机速度
}
```
**逻辑分析:**
该代码实现了GPIO接口控制电机驱动电路,根据输入的dir(方向)和speed(速度)参数,控制电机的正反转。TIM_SetCompare1函数用于设置PWM占空比,从而控制电机的速度。
# 4. 步进电机应用拓展
### 4.1 位置控制技术
#### 4.1.1 光电编码器原理
光电编码器是一种将电机轴的转动位置转换为电信号的传感器。它由一个光源、一个光电接收器和一个带有刻度的编码盘组成。当编码盘旋转时,光源发出的光线会被编码盘上的刻度遮挡,从而产生周期性的光电信号。通过对这些信号进行计数和处理,可以得到电机轴的转动位置。
#### 4.1.2 位置闭环控制算法
位置闭环控制算法是一种通过反馈电机轴的实际位置来调整电机驱动信号,从而实现精确位置控制的算法。其基本原理是:
1. **测量电机轴的实际位置:**使用光电编码器或其他位置传感器测量电机轴的实际位置。
2. **计算位置误差:**将实际位置与目标位置进行比较,计算出位置误差。
3. **调整电机驱动信号:**根据位置误差调整电机驱动信号,使电机轴的实际位置逐渐接近目标位置。
### 4.2 速度控制技术
#### 4.2.1 速度传感器原理
速度传感器是一种将电机轴的转速转换为电信号的传感器。它有各种类型,如霍尔传感器、磁阻传感器和光电传感器。这些传感器通过检测电机轴上的磁场或光学信号的变化来产生与转速成正比的电信号。
#### 4.2.2 速度闭环控制算法
速度闭环控制算法是一种通过反馈电机轴的实际速度来调整电机驱动信号,从而实现精确速度控制的算法。其基本原理是:
1. **测量电机轴的实际速度:**使用速度传感器测量电机轴的实际速度。
2. **计算速度误差:**将实际速度与目标速度进行比较,计算出速度误差。
3. **调整电机驱动信号:**根据速度误差调整电机驱动信号,使电机轴的实际速度逐渐接近目标速度。
**代码块:**
```python
# 位置闭环控制算法
def position_control(target_position, current_position):
"""
位置闭环控制算法
Args:
target_position: 目标位置
current_position: 当前位置
"""
error = target_position - current_position
control_signal = PID_controller(error)
return control_signal
# 速度闭环控制算法
def speed_control(target_speed, current_speed):
"""
速度闭环控制算法
Args:
target_speed: 目标速度
current_speed: 当前速度
"""
error = target_speed - current_speed
control_signal = PID_controller(error)
return control_signal
```
**代码逻辑分析:**
* `position_control()` 函数实现了位置闭环控制算法。它首先计算目标位置和当前位置之间的误差,然后使用 PID 控制器生成控制信号。
* `speed_control()` 函数实现了速度闭环控制算法。它首先计算目标速度和当前速度之间的误差,然后使用 PID 控制器生成控制信号。
**参数说明:**
* `target_position`:目标位置
* `current_position`:当前位置
* `target_speed`:目标速度
* `current_speed`:当前速度
**表格:**
| 控制类型 | 原理 | 优点 | 缺点 |
|---|---|---|---|
| 开环控制 | 不使用反馈 | 简单易实现 | 精度低 |
| 闭环控制 | 使用反馈 | 精度高 | 复杂度高 |
**Mermaid 流程图:**
```mermaid
graph LR
subgraph 位置闭环控制
A[测量实际位置] --> B[计算位置误差] --> C[调整电机驱动信号]
end
subgraph 速度闭环控制
D[测量实际速度] --> E[计算速度误差] --> F[调整电机驱动信号]
end
```
# 5. 步进电机故障诊断与维护
### 5.1 常见故障现象
步进电机在运行过程中可能会出现各种故障现象,常见的故障现象包括:
- **丢步:**电机未能响应所有控制脉冲,导致实际转角与期望转角不一致。
- **振动:**电机在运行时产生异常振动,影响运行平稳性。
- **异响:**电机在运行时发出异常响声,如异响、摩擦声等。
### 5.2 故障诊断与维护
**5.2.1 故障原因分析**
步进电机故障的原因可能是多方面的,常见的原因包括:
- **控制脉冲异常:**控制脉冲频率、脉宽或相序不正确,导致电机无法正常运行。
- **驱动电路故障:**驱动电路损坏或参数设置不当,导致电机无法获得足够的驱动电流。
- **电机本身故障:**电机内部绕组断线、短路或磁极退磁,导致电机性能下降。
- **负载过大:**电机负载过大,超过电机额定扭矩,导致电机丢步或振动。
- **环境因素:**电机工作环境温度过高、湿度过大或灰尘过多,影响电机正常运行。
**5.2.2 维护措施**
针对不同的故障原因,需要采取不同的维护措施:
- **控制脉冲异常:**检查控制脉冲源,确保脉冲频率、脉宽和相序正确。
- **驱动电路故障:**检查驱动电路的供电电压、驱动电流和参数设置,必要时更换损坏的元件。
- **电机本身故障:**检查电机绕组电阻、绝缘电阻和磁极磁通量,必要时更换损坏的电机。
- **负载过大:**减小电机负载或更换更大扭矩的电机。
- **环境因素:**改善电机工作环境,降低温度、湿度和灰尘,必要时采取防尘措施。
**定期维护:**
除了故障诊断与维护外,定期维护对于延长步进电机使用寿命至关重要。定期维护措施包括:
- **清洁:**定期清洁电机表面和内部,清除灰尘和异物。
- **润滑:**根据电机使用说明书,定期给电机轴承和齿轮添加润滑剂。
- **检查:**定期检查电机绕组绝缘电阻和磁极磁通量,及时发现潜在故障。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨单片机步进电机控制的方方面面,从基础概念到高级技术,为读者提供全面的指南。专栏文章涵盖步进电机控制的秘诀、细分驱动和闭环控制的奥秘、步进电机控制算法的精解、单片机步进电机控制的实战宝典、步进电机控制故障排除指南、步进电机控制系统的设计与优化、步进电机控制在工业自动化中的应用案例、步进电机控制在航空航天领域的突破、步进电机控制在消费电子产品中的普及、步进电机控制在汽车工业中的变革、步进电机控制在半导体制造中的精髓、步进电机控制在食品加工工业中的自动化、步进电机控制在印刷工业中的精细、步进电机控制在物流工业中的智能等主题。通过深入浅出的讲解和丰富的实战经验分享,本专栏旨在帮助读者掌握步进电机控制的知识和技能,提升系统性能,解决常见问题,并推动步进电机控制在各个领域的应用和创新。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
SaTScan软件的扩展应用:与其他统计软件的协同工作揭秘
# 1. SaTScan软件概述
SaTScan是一种用于空间、时间和空间时间数据分析的免费软件,它通过可变动的圆形窗口统计分析方法来识别数据中的异常聚集。本章将简要介绍SaTScan的起源、功能及如何在不同领域中得到应用。SaTScan软件特别适合公共卫生研究、环境监测和流行病学调查等领域,能够帮助研究人员和决策者发现数据中的模式和异常,进行预防和控制策略的制定。
在
雷达数据压缩技术突破:提升效率与存储优化新策略

# 1. 雷达数据压缩技术概述
在现代军事和民用领域,雷达系统产生了大量的数据,这些数据的处理和存储是技术进步的关键。本章旨在对雷达数据压缩技术进行简要
Java SPI与依赖注入(DI)整合:技术策略与实践案例
# 1. Java SPI机制概述
## 1.1 SPI的概念与作用
Service Provider Interface(SPI)是Java提供的一套服务发现机制,允许我们在运行时动态地提供和替换服务实现。它主要被用来实现模块之间的解耦,使得系统更加灵活,易于扩展。通过定义一个接口以及一个用于存放具体服务实现类的配置文件,我们可以轻松地在不修改现有代码的情况下,增加或替换底
【矩阵求逆的历史演变】:从高斯到现代算法的发展之旅

# 1. 矩阵求逆概念的起源与基础
## 1.1 起源背景
矩阵求逆是线性代数中的一个重要概念,其起源可以追溯到19世纪初,当时科学家们开始探索线性方程组的解法。早期的数学家如高斯(Carl Friedrich Gauss)通过消元法解决了线性方程组问题,为矩阵求逆奠定了基础。
原型设计:提升需求沟通效率的有效途径

# 1. 原型设计概述
在现代产品设计领域,原型设计扮演着至关重要的角色。它不仅是连接设计与开发的桥梁,更是一种沟通与验证设计思维的有效工具。随着技术的发展和市场对产品快速迭代的要求不断提高,原型设计已经成为产品生命周期中不可或缺的一环。通过创建原型,设计师能够快速理解用户需求,验证产品概念,及早发现潜在问题,并有效地与项目相关方沟通想法,从而推动产品向前发展。本章将对原型设计的必要性、演变以及其在产品开发过程中的作
Python环境监控高可用构建:可靠性增强的策略

# 1. Python环境监控高可用构建概述
在构建Python环境监控系统时,确保系统的高可用性是至关重要的。监控系统不仅要在系统正常运行时提供实时的性能指标,而且在出现故障或性能瓶颈时,能够迅速响应并采取措施,避免业务中断。高可用监控系统的设计需要综合考虑监控范围、系统架构、工具选型等多个方面,以达到对资源消耗最小化、数据准确性和响应速度最优化的目
【信号异常检测法】:FFT在信号突变识别中的关键作用
# 1. 信号异常检测法基础
## 1.1 信号异常检测的重要性
在众多的IT和相关领域中,从工业监控到医疗设备,信号异常检测是确保系统安全和可靠运行的关键技术。信号异常检测的目的是及时发现数据中的不规则模式,这些模式可能表明了设备故障、网络攻击或其他需要立即关注的问题。
## 1.2 信号异常检测方法概述
信号异常检测的方法多种多样,包括统计学方法、机器学习方法、以及基于特定信号
社交网络分析工具大比拼:Gephi, NodeXL, UCINET优劣全面对比
# 1. 社交网络分析概述
社交网络分析是理解和揭示社会结构和信息流的一种强有力的工具,它跨越了人文和社会科学的边界,找到了在计算机科学中的一个牢固立足点。这一分析不仅限于对人际关系的研究,更扩展到信息传播、影响力扩散、群体行为等多个层面。
## 1.1 社交网络分析的定义
社交网络分析(Social Network Analysis,简称SNA)是一种研究社会结构的方法论
【EDEM仿真非球形粒子专家】:揭秘提升仿真准确性的核心技术

# 1. EDEM仿真软件概述与非球形粒子的重要性
## 1.1 EDEM仿真软件简介
EDEM是一种用于粒子模拟的仿真工具,能够准确地模拟和分析各种离散元方法(Discrete Element Method, DEM)问题。该软件广泛应用于采矿
SGMII传输层优化:延迟与吞吐量的双重提升技术

# 1. SGMII传输层优化概述
在信息技术不断发展的今天,网络传输的效率直接影响着整个系统的性能。作为以太网物理层的标准之一,SGMII(Serial Gigabit Media Independent Interface)在高性能网络设计中起着至关重要的作用。SGMII传输层优化,就是通过一系列手段来提高数据传输效率,减少延迟,提升吞吐量,从而达到优化整个网络性能的目
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )