自适应控制技术:适应系统变化的先进控制方法
发布时间: 2024-12-19 21:14:06 阅读量: 3 订阅数: 6 

# 摘要
自适应控制技术是一种使控制系统能够自动调整其性能以适应未知或变化的环境的技术。本文首先概述了自适应控制技术的发展背景和理论基础,接着深入分析了自适应控制系统的分类和设计方法。在实现方法部分,本文详细介绍了自适应控制算法的实现以及仿真平台的使用和步骤。通过对工业过程控制和机器人自动化技术中自适应控制的实际案例进行分析,本文指出了目前该技术所面临的挑战与未来的发展趋势,并提出了可能的研究方向,如互联网+自适应控制融合、跨学科研究趋势以及机器学习技术的融入。通过这些讨论,本文旨在为自适应控制技术的深入研究和实际应用提供参考和启示。
# 关键字
自适应控制技术;系统建模;稳定性与收敛性;自适应控制器设计;仿真与实际应用;跨学科融合
参考资源链接:[浙江大学控制理论课程用书CAI教程答案及习题解析](https://wenku.csdn.net/doc/6xz2sgqoh2?spm=1055.2635.3001.10343)
# 1. 自适应控制技术概述
## 1.1 自适应控制技术的定义
自适应控制是一种先进的控制方法,它允许控制系统的参数或结构根据被控对象和环境的变化进行自动调整。这种技术的核心在于它的自适应性,即通过实时的学习和评估过程,系统能够自我优化以适应未知或变化的外部条件。
## 1.2 自适应控制技术的发展历程
自适应控制技术的发展始于20世纪50年代,起初用于航空航天领域,以解决飞行器在飞行过程中的动态变化问题。随着时间的推移,其应用范围逐步扩大,现在已经广泛应用于工业自动化、机器人技术、生物医学工程等多个领域。
## 1.3 自适应控制技术的重要性
在现代复杂的工业环境中,系统的不确定性和外部环境的多变性使得传统的固定参数控制方法难以适应。自适应控制技术的重要性在于其能够提供一种灵活的解决方案,确保控制系统的性能在各种条件下保持最优或近似最优,从而提高了整个系统的可靠性和效率。
# 2. 自适应控制系统的基本理论
### 2.1 自适应控制的数学基础
在自适应控制系统的设计与实现过程中,数学基础是不可或缺的支撑。理解这些数学工具不仅可以帮助工程师们构建更加精确的控制模型,还能优化控制策略,实现对复杂动态系统的有效控制。
#### 2.1.1 系统建模和参数估计
系统建模是将实际系统转换为数学模型的过程,它是自适应控制技术的基础。根据控制目标和系统特性,模型可以分为线性模型和非线性模型。对于线性系统,常用的是传递函数模型和状态空间模型。而对于非线性系统,需要采用更为复杂的数学工具,如泛函分析、微分几何等。
参数估计指的是从输入输出数据中估计出系统的参数,这在自适应控制中尤为重要,因为系统的参数可能会因为外部环境和内部状态的变化而发生变化。常见的参数估计方法有最小二乘法、极大似然估计等。这些方法可以帮助控制工程师获取系统动态特性的精确信息,并据此设计控制策略。
```mermaid
graph TD
A[开始系统建模] --> B[选择模型类型]
B --> C[线性模型]
B --> D[非线性模型]
C --> E[传递函数模型]
C --> F[状态空间模型]
D --> G[泛函分析方法]
D --> H[微分几何方法]
E --> I[模型验证与优化]
F --> I
G --> I
H --> I
```
#### 2.1.2 稳定性和收敛性理论
在自适应控制系统中,系统的稳定性和收敛性是衡量控制性能的重要指标。稳定性的理论基础来自于拉普拉斯变换和李亚普诺夫稳定性理论。通过这些理论,可以分析系统在受到扰动或参数变化时的稳定性边界,并且确定系统是否会在自适应律的作用下趋于稳定。
收敛性指的是随着控制器学习和适应过程的进行,控制误差会逐渐减小,系统性能逐步提高。在实际应用中,通常需要证明参数估计的收敛性,并确保控制算法能够在线性或非线性系统中保持收敛。
### 2.2 自适应控制的分类
自适应控制技术可以根据不同的应用背景和系统特性分为几种不同的类型。每种类型都有其特定的设计方法和应用场景。
#### 2.2.1 参数自适应控制
参数自适应控制主要侧重于对系统内部参数的调整,以应对系统特性随时间变化的问题。在这种控制策略中,控制器会实时地测量系统输出,并与期望输出进行比较,然后调整内部参数来减小误差。参数自适应控制的算法通常基于模型参考自适应控制(MRAC)和最小方差控制等原理。
```mermaid
graph TD
A[参数自适应控制] --> B[系统输出测量]
B --> C[误差计算]
C --> D[参数调整]
D --> E[控制器性能提升]
```
#### 2.2.2 模型参考自适应控制(MRAC)
MRAC是一种自适应控制策略,其中控制系统的性能是通过与一个给定的参考模型相比较来评估的。如果系统的输出与参考模型的输出之间存在差异,控制器会自动调整,以确保系统输出能够跟踪参考模型的输出。MRAC特别适用于那些具有不确定动态特性的系统。
#### 2.2.3 直接自适应控制
直接自适应控制是指控制器直接利用测量得到的输入输出数据来调整控制参数,无需一个预设的参考模型。这类控制策略通常用于那些难以建立精确数学模型的系统。
### 2.3 自适应控制器的设计方法
设计自适应控制器的目标是实现对系统行为的有效控制,同时保证系统的稳定性和收敛性。这一过程中,设计者需要选择合适的控制算法,并对控制器参数进行精确的配置。
#### 2.3.1 最小方差控制
最小方差控制是一种性能指标,用于衡量控制策略的效果。其核心思想是通过调整控制输入,使得系统的输出方差达到最小。这种方法特别适用于那些输出与控制输入之间存在时间延迟的系统。
#### 2.3.2 极点配置和状态反馈
极点配置是自适应控制中的一项技术,它允许控制工程师通过改变系统的极点位置来改善系统的动态响应。而状态反馈控制则是利用系统内部状态信息来设计控制器,使得系统具有期望的动态特性。这两种方法都需要精确的系统建模和参数估计作为基础。
以上章节中涉及的理论知识,是设计和实现自适应控制系统的前提,它们相互依存、相互促进。掌握好这些基础知识,是进一步深入自适应控制技术领域的关键。
# 3. 自适应控制技术的实现方法
## 3.1 自适应控制算法的实现
在自适应控制技术中,算法的实现是核

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏题为“控制理论答案”,深入探讨了控制理论的各个方面。它涵盖了从基本概念到先进技术的一系列主题,包括:
* 控制系统的稳定性分析,提供稳定性判据的深入解析。
* PID控制器原理与实践,从理论到应用的全面指南。
* 现代控制理论与应用,扩展至状态空间方法。
* 非线性控制系统的挑战与机遇,探索非线性动力学。
* 控制理论在机器人技术中的应用,理论与实践的结合。
* 滤波器设计与实现,控制理论中的关键环节。
* 预测控制策略,前瞻性和实时性的结合。
* 自适应控制技术,适应系统变化的先进控制方法。
* 鲁棒控制理论,确保系统性能在不确定性中的稳定性。
* 控制理论在电力系统中的应用,稳定性与经济性的平衡。
* 多变量控制系统设计,处理复杂系统交互的策略。
* 控制理论在航空航天领域的应用,精确制导与稳定控制。
* 控制理论在化学工程中的应用,过程控制的精确调控。
* 控制系统的故障诊断与容错控制,提高系统可靠性。
* 控制理论在生物医学工程中的应用,生命支持系统的设计。
* 控制理论在交通系统中的应用,提高运输效率与安全性。
本专栏为控制理论领域的专业人士、研究人员和学生提供了宝贵的见解和实用指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
IPD研发流程风险管理全攻略:识别、评估与应对策略
# 摘要
本文综合介绍了集成产品开发(IPD)研发流程中的风险管理和应对策略。首先概述了IPD流程和风险识别的重要性,接着详细探讨了风险识别的方法和工具,如头脑风暴、SWOT分析和故障树分析。文章深入分析了风险评估模型和策略,包括定量与定性评估方法及其在实际项目中的应用。此外,本文还讨论了多种风险应对策略和计划制定,并强调了风险监控与控制的重要性。最后,探讨了风险管理工具和最佳实践,以及人工智能在风
【PID巡线算法全解析】:24个实用技巧助您快速精通

# 摘要
本文介绍了PID巡线算法的基本概念及其在各种应用场景中的应用。首先,阐述了PID巡线算法的理论基础,涵盖PID控制原理、控制器设计与调整,以及数学模型。随后,详细描述了该算法的实践应用,包括实现步骤、优化技巧和针对不同环境的策略。最后,探讨了PID巡线算法的高级技巧和进阶应用,如自适应PID控制器、与其他算法的结合以及未来发展趋势。本文旨在为机器人巡线技术提供全面的理论和实践指导,推动自动化和智
分布式系统设计原则:如何构建可扩展的架构
# 摘要
分布式系统作为一种高级的计算架构,其设计和实现涉及到复杂的概念与原则,包括可扩展性、容错性、一致性模型以及数据管理等。本文深入探讨了分布式系统的基础知识和核心设计原则,分析了一致性模型中的强一致性与最终一致性,并解读了CAP定理在实际应用中的含义。此外,本文还介绍了服务发现与注册机制、微服务架构的应用以及负载均衡与弹性伸缩的实践技巧,并通过案例分析,探讨了大规模分布式系统的构建、故障应对策略以及性能优化方
【Overture中文版快捷键大公开】:音乐制作速度提升10倍的秘诀

# 摘要
本文详细介绍了Overture中文版中的快捷键使用方法,并对其在音乐制作中的应用进行了深入探讨。文章从基础操作快捷键开始,涵盖了窗口管理、音轨编辑、常用工具等方面。随后,文章深入高级操作快捷键,包括调色板、音量调整、音效应用及乐谱编辑等。接着,文章探讨了快捷键映射、设置、高级操作技巧以及自定义快捷键的方法,旨在提高用户工作效率。最后,通过实例分析展示了快捷键
R422与MAX488:如何在24小时内优化你的串行通信体验

# 摘要
本文系统性地介绍了串行通信的基础知识,重点关注了R422和MAX488两种广泛应用于串行通信中的接口技术。首先,文章阐述了串行通信的工作原理及在数据传输中的关键作用,并对R422与MAX488的技术特性和应用场景进行了深入分析。随后,通过实践应用案例,探讨了如何搭建R422的实际应用环境,并分析了MAX488网络构建及故障排除技巧,同时提供了提升通信效
【掌握G711编解码:10分钟精通alaw与ulaw】:立竿见影的转换技巧及应用案例
# 摘要
G711编解码技术是通信领域中广泛使用的一种音频数据压缩与解压缩标准。本文首先对G711编解码的基础概念、ALaw与ULaw编码原理进行了概述,并深入分析了编码转换的数学基础。接着,文章探讨了G711在实践应用中的编程技巧、音频处理案例,以及跨平台实现方法。文章还详细介绍了提高编解码转换效率的技术和针对不同应
【性能提升秘籍】:Matrix 210N关键设置优化,效率飞升!
# 摘要
本文旨在探讨Matrix 210N的性能优化需求与实现方法。首先介绍Matrix 210N的基本概念,随后分别从硬件层和软件层对关键性能参数进行解析,着重阐述CPU和内存的优化策略、存储系统和网络性能的调优方法。进一步,在软件层面上,本研究通过操作系统监控、应用程序优化以及虚拟化环境下的性能调优,深入分析性能瓶颈并提出解
【Intel G4560显卡驱动终极安装指南】:一站式解决所有安装难题
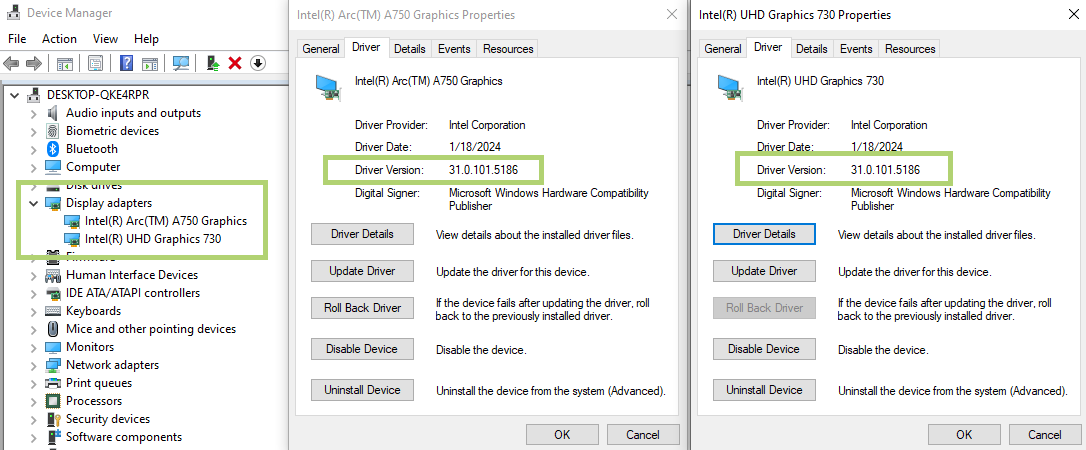
# 摘要
本文深入探讨了Intel G4560显卡及其驱动安装的重要性、理论基础、具体安装流程以及高级配置和监控。首先概述了Intel G4560显卡的重要性和应用场景,随后介绍了显卡驱动的工作原理以及在不同系统类型下安装前的理论基础。接着,详细阐述了Windows和Linux系统下显卡驱动的具体安装步骤、常见问题的解决方案以及性能优化技巧。文章还探讨了显
无缝集成的秘密:Sumo和MATLAB跨平台协作技巧全解
# 摘要
随着技术的不断发展,跨平台协作已成为现代科技项目成功的关键。本文首先强调了跨平台协作的重要性,并介绍了其基础。接着,详细探讨了Sumo与MATLAB基础集成的各个方面,包括数据交换机制、集成环境配置和优化,以及集成中所采用的高级技术应用。通过模型构建、信号处理和自动化测试的案例,本文展示了如何实现有效的跨平台协作。第四章分析了集成过程中可能遇到的问题及其解决方案。最后一章展望了跨平台技术的发展前景,讨
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )