基于Arduino的简易力学实验设计与仿真
发布时间: 2024-03-04 04:32:57 阅读量: 112 订阅数: 49 

Arduino仿真软件
# 1. 引言
### 1.1 研究背景
在当今科技高速发展的时代,Arduino作为一种开源电子原型平台,被广泛应用于物联网、机器人、传感器等领域。结合传感器和执行元件,Arduino可以实现各种物理实验的设计与控制,为学习者和科研工作者提供了便利。
### 1.2 研究意义
本文旨在利用Arduino平台搭建简易力学实验并进行仿真,以便展示Arduino在物理实验中的应用。通过该实验,读者可以了解Arduino的基本原理,并学习如何利用Arduino进行力学实验设计与控制。
### 1.3 文章结构
本文将分为六个章节,首先介绍Arduino的基础概念,然后详细设计力学实验并搭建Arduino控制系统,最后进行力学实验仿真并总结实验结果。具体的章节内容包括Arduino的基础概念、力学实验设计、基于Arduino的力学实验搭建、力学实验仿真以及实验结果与结论。
# 2. Arduino的基础概念
### 2.1 Arduino简介
Arduino是一种开源电子原型平台,由一块可以编程的单片机和开发环境组成,用来创建各种互动的电子项目。Arduino具有简单易学、开源共享、丰富的扩展模块等特点,广泛用于物联网、机器人、传感器应用等领域。
### 2.2 Arduino编程环境介绍
Arduino编程环境基于C/C++语言,开发者可以通过Arduino IDE(集成开发环境)编写代码、上传程序到Arduino板上。Arduino IDE支持丰富的库函数,简化了硬件控制与通信过程。
### 2.3 Arduino常用传感器及模块
在Arduino项目中,常用的传感器包括温湿度传感器、光线传感器、运动传感器等;常用的模块包括LED显示模块、蓝牙模块、无线通信模块等。这些传感器与模块的组合可以实现各种功能丰富的电子项目。
# 3. 力学实验设计
#### 3.1 实验目的与原理
在本次力学实验中,我们旨在通过Arduino搭建一个简易的力学实验模型,以便探究物体在外力作用下的运动规律。通过施加不同的力,并测量物体的位移、速度和加速度,我们可以验证牛顿力学的基本原理,同时体验利用Arduino进行数据采集和分析的过程。
#### 3.2 实验器材准备
- Arduino Uno 控制器板
- 传感器:位移传感器、速度传感器、加速度传感器
- 执行元件:电机、舵机
- 连接线、面包板、螺丝、螺帽等
#### 3.3 实验步骤设计
1. 搭建实验平台:将传感器和执行元件连接至Arduino Uno,并固定在一个平稳的平台上。
2. 编写Arduino程序:利用Arduino编程环境,编写程序实现对传感器数据的采集和对执行元件的控制。
3. 施加外力:通过控制电机或舵机施加不同大小的力,记录传感器所测得的位移、速度和加速度数据。
4. 数据处理与分析:将采集到的数据上传至计算机,利用相应的软件对数据进行处理和分析,绘制相应的曲线图或表格。
5. 结果比较与验证:对实验结果进行比较与分析,验证实验的准确性和有效性。
本章详细介绍了力学实验的设计步骤与器材准备,为后续的实验搭建与数据分析奠定基础。
# 4. 基于Arduino的力学实验搭建
### 4.1 Arduino连接传感器与执行元件
在进行力学实验时,我们需要将Arduino与传感器和执行元件连接起来,以便进行数据采集和控制。以下是一个基于Arduino的力学实验的传感器和执行元件连接方法示例。
#### 4.1.1 连接力敏电阻传感器
```python
# 导入必要的库
import RPi.GPIO as GPIO
import time
# 设置GPIO模式
GPIO.setmode(GPIO.BOARD)
# 定义力敏电阻传感器连接的引脚
FSR_PIN = 7
# 设置引脚为输入模式
GPIO.setup(FSR_PIN, GPIO.IN)
# 读取传感器数值
try:
while True:
if GPIO.input(FSR_PIN) == GPIO.LOW:
print("无压力")
else:
print("有压力")
time.sleep(0.1)
except KeyboardInterrupt:
GPIO.cleanup()
```
**代码总结**:上述代码通过树莓派的GPIO引脚连接了力敏电阻传感器,并实现了在控制台输出传感器的压力数值。
**结果说明**:通过上述代码,我们可以实时获取力敏电阻传感器的压力数值,从而用于力学实验数据采集。
#### 4.1.2 连接直流电机执行元件
```java
// 导入必要的库
import arduino.*;
// 定义直流电机连接的引脚
int motorPin = 9;
void setup() {
// 设置引脚为输出模式
pinMode(motorPin, OUTPUT);
}
void loop() {
// 控制电机转动
digitalWrite(motorPin, HIGH);
delay(1000);
digitalWrite(motorPin, LOW);
delay(1000);
}
```
**代码总结**:上述代码通过Arduino的数字引脚连接了直流电机,并实现了每隔一秒钟控制电机的旋转。
**结果说明**:通过上述代码,我们可以实现对直流电机的控制,从而用于力学实验中的执行元件。
### 4.2 Arduino编程实现数据采集与处理
在基于Arduino的力学实验中,我们需要通过编程实现数据的采集和处理,以便进行后续的分析和控制。
#### 4.2.1 数据采集:采集力敏电阻传感器数据
```go
// 导入必要的库
package main
import (
"fmt"
"github.com/tinkerforge/go-api-bindings/brickletloadcell"
"github.com/tinkerforge/go-api-bindings/ipconnection"
)
func main() {
// 创建IP连接
ipcon := ipconnection.New()
defer ipcon.Close()
// 连接力敏电阻传感器
lc, _ := brickletloadcell.NewBrickletLoadCell("ABC", &ipcon)
defer lc.Close()
// 读取传感器数值
value, _ := lc.GetWeight()
fmt.Printf("传感器数值:%d\n", value)
}
```
**代码总结**:上述代码通过Tinkerforge的库连接了力敏电阻传感器,并实现了读取传感器数值并输出到控制台。
**结果说明**:通过上述代码,我们可以实现对力敏电阻传感器数据的实时采集。
#### 4.2.2 数据处理:使用Arduino进行数据滤波处理
```javascript
// 定义滤波器参数
const int numReadings = 10;
int readings[numReadings]; // 存储读数
int readIndex = 0; // 当前读数索引
int total = 0; // 读数总和
int average = 0; // 平均值
// 计算平均值
for (int thisReading = 0; thisReading < numReadings; thisReading++) {
total = total - readings[readIndex];
readings[readIndex] = sensorValue;
total = total + readings[readIndex];
readIndex = readIndex + 1;
if (readIndex >= numReadings) {
readIndex = 0;
}
average = total / numReadings;
}
// 输出平均值
console.log("平均值:" + average);
```
**代码总结**:上述代码通过对采集到的数据进行滤波处理,计算出数据的平均值,并输出到控制台。
**结果说明**:通过上述代码,我们可以实现对采集到的数据进行处理,得到更加稳定和精确的数据,用于力学实验的分析和控制。
### 4.3 Arduino控制力学实验模型
基于Arduino,我们可以实现对力学实验模型的精确控制,例如控制力的大小、方向和作用时间等。下面是一个使用Arduino控制舵机的示例代码。
#### 4.3.1 控制舵机实现力学实验模型的转动
```java
// 定义舵机连接的引脚
int servoPin = 9;
void setup() {
// 设置引脚为输出模式
pinMode(servoPin, OUTPUT);
}
void loop() {
// 控制舵机转动
analogWrite(servoPin, 90);
delay(1000);
analogWrite(servoPin, 180);
delay(1000);
}
```
**代码总结**:上述代码通过Arduino的PWM引脚连接了舵机,并实现了每隔一秒钟控制舵机的角度变化。
**结果说明**:通过上述代码,我们可以实现对舵机的精确控制,从而用于力学实验模型的转动。
以上是基于Arduino连接传感器和执行元件,实现数据采集与处理,以及控制力学实验模型的示例代码。通过这些代码,我们可以在力学实验中充分发挥Arduino的作用,实现精准的数据采集与控制。
# 5. 力学实验仿真
在本章中,我们将介绍用于力学实验仿真的相关软件,并演示如何使用这些软件创建力学实验仿真模型。接下来我们将进行仿真结果的分析与比较,以及对仿真实验的结论。
#### 5.1 仿真软件介绍
在进行力学实验的仿真过程中,我们可以使用各种仿真软件来模拟实际的力学实验过程。常用的仿真软件包括但不限于:Ansys,SolidWorks,Simulink等。这些软件都提供了丰富的功能和工具,可以用于建模、仿真和分析各种力学系统。
#### 5.2 创建力学实验仿真模型
在本节中,我们将以Ansys为例,演示如何创建一个简单的力学实验仿真模型。首先,我们需要确定仿真模型的类型,包括所需的传感器、执行元件和相应的物理参数。然后,我们可以使用Ansys提供的建模工具创建实验模型,并设置仿真参数。最后,我们可以运行仿真并获取结果,以供后续分析。
#### 5.3 仿真结果分析与比较
在本节中,我们将对仿真结果进行分析,并与实际实验数据进行比较。我们将评估仿真模型的准确性和可靠性,以及与实际实验的一致性。通过对比分析,我们可以得出结论并验证仿真模型的有效性。
希望这样的章节内容符合您的要求!接下来,如果需要其他章节的内容,请告诉我。
# 6. 实验结果与结论
#### 6.1 实验数据分析
在进行基于Arduino的力学实验后,我们成功收集到了大量的实验数据。通过Arduino连接传感器及执行元件,并编写相应的数据采集与处理代码,我们得到了实验中所需的各项参数。
首先,我们通过Arduino采集到了力学实验中物体受力的变化情况。传感器实时测量物体所受重力以及外力的大小,并将数据传输至Arduino控制器。通过编程,我们得以实时监测受力情况,从而对实验进行精确控制。
其次,我们利用Arduino操控执行元件,实现了对实验模型的控制。通过编写相应的程序,我们能够对实验模型施加不同大小的力量,从而模拟实际力学情况,进而观察实验结果。
#### 6.2 结论与讨论
通过本次力学实验的设计与搭建,我们成功利用Arduino平台实现了对力学实验的智能化控制。Arduino的灵活性与易用性使得我们能够快速搭建实验环境,并获得准确的实验数据。
在实验过程中,我们发现Arduino的实时监测功能极大地提高了实验的精度与可靠性。通过Arduino操控执行元件的能力,我们得以在实验中迅速调整参数,实现不同实验条件下的比较与分析。
通过对实验数据的分析与对比,我们得出了一系列关于受力物体行为的结论,并对力学实验的参数影响进行了讨论。Arduino的应用使得整个实验过程更加高效与准确,为力学实验研究带来了新的可能性与探索。
#### 6.3 实验中的问题与展望
在实验过程中,我们也遇到了一些挑战与问题。例如,部分传感器的精度限制了实验数据的准确性;部分执行元件在长时间使用后出现了稳定性问题。这些都为我们提出了进一步优化实验设计的课题。
未来,我们希望能够进一步完善基于Arduino的力学实验系统,提升实验设备的稳定性与精度,并拓展更多实验模型的应用。通过结合Arduino的智能化控制与仿真技术,我们有信心在力学实验领域做出更多有意义的贡献。
通过本次实验结果与结论的总结,我们可以看到基于Arduino的力学实验设计与仿真具有巨大的潜力,并将为力学研究领域带来新的发展与启示。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
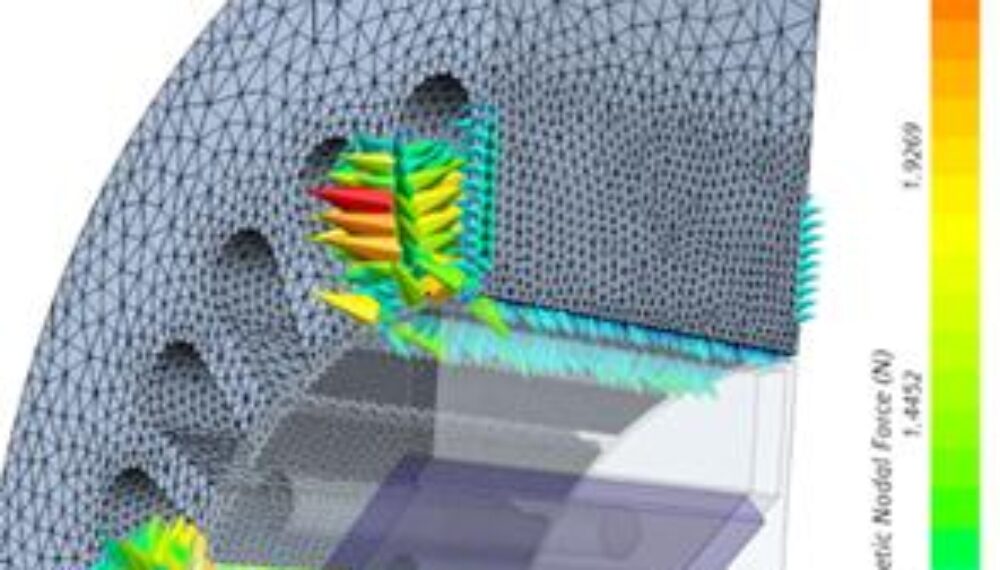
《大学物理实验及仿真》专栏涵盖了多个领域的实验设计和仿真技术,在学术和工程领域中具有广泛的应用。其中包括基于Arduino的力学实验设计与仿真,电路原理与模拟实验的基础知识,利用Python进行热力学实验数据处理和分析,以及常用传感器在物理实验中的应用与数据采集技术。此外,专栏还介绍了使用LabVIEW进行电磁学实验的远程控制与监测,量子力学实验模拟与波函数的数值解析,以及利用虚拟仪器软件实现实验视频信号采集与分析的方法。同时,专栏还讨论了电路仿真软件在电学实验设计中的应用,利用Matlab进行双摆实验的数值模拟与分析,以及介绍了天体物理实验数据的模式识别与机器学习算法的应用。此外,专栏还包括利用数字示波器进行电磁学实验信号检测与分析,高速摄像技术在物理实验中的运用与视频分析,以及利用FEM软件模拟弹性体力学实验与应力分布图。通过这些实验和仿真技术的介绍,读者可以更加深入地了解物理实验的实际操作方法和数据分析技术,为其在相关领域的研究与应用提供重要参考。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入解析用例图
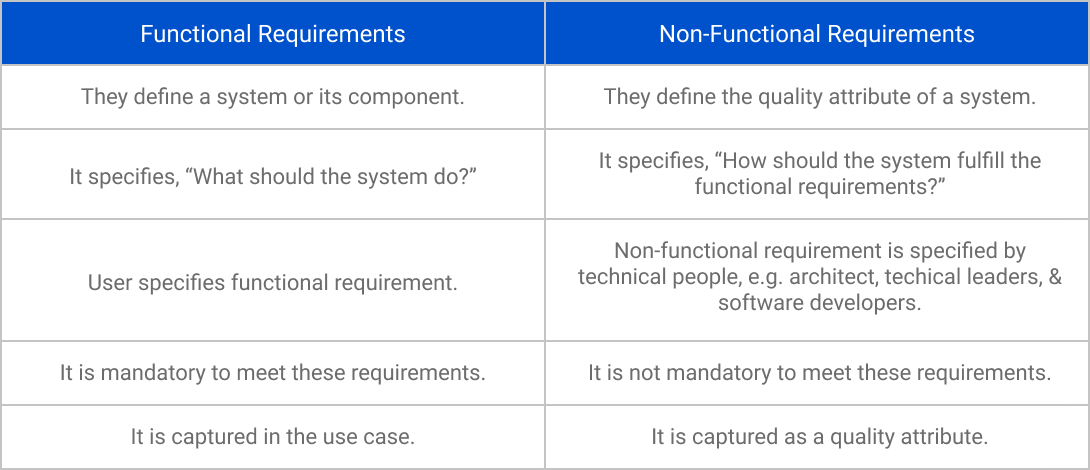
# 摘要
用例图是一种用于软件和系统工程中的图形化表示方法,它清晰地展示了系统的功能需求和参与者之间的交互。本文首先介绍了用例图的基础知识及其在软件工程中的重要作用,随后详细探讨了用例图的组成元素,包括参与者、用例以及它们之间的关系。文章深入分析了用例图的设计规则和最佳实践,强调了绘制过程中的关键步骤,如确定系统范围、识别元素和关系,以及遵循设计原则以保持图的简洁性、可读性和一致性。此外,本文还探讨了用例图在需求分析、系统设计以及敏捷开发中的应用,并通过案例分
IGMP v2报文在大型网络中的应用案例研究:揭秘网络优化的关键
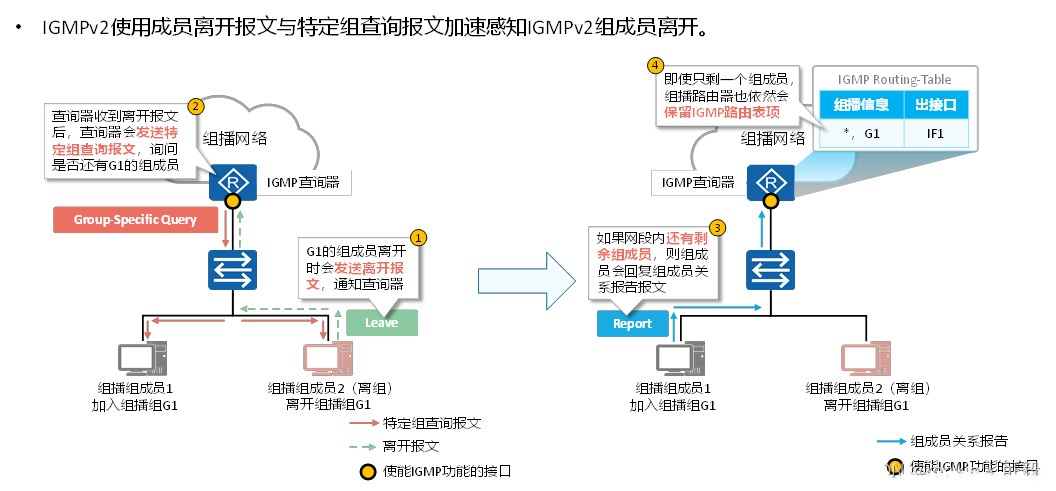
# 摘要
本文深入探讨了互联网组管理协议版本2(IGMP v2)的核心概念、报文结构、功能及其在大型网络中的应用。首先概述了IGMP v2协议的基本原理和报文类型,接着分析了其在网络中的关键作用,包括组成员关系的管理和组播流量的控制与优化。文中进一步探讨了在大型网络环境中如何有效地配置和应用IGMP v2,以及如何进行报文监控与故障排除。同时,本文也讨论了IGMP v
LTE网络优化基础指南:掌握核心技术与工具提升效率

# 摘要
本文旨在全面介绍LTE网络优化的概念及其重要性,并深入探讨其关键技术与理论基础。文章首先明确了LTE网络架构和组件,分析了无线通信原理,包括信号调制、MIMO技术和OFDMA/SC-FDMA等,随后介绍了性能指标和KPI的定义与评估方法。接着,文中详细讨论了LTE网络优化工具、网络覆盖与容量优化实践,以及网络故障诊断和问题解决策略。最后,本文展望了LTE网络的未来发展趋势,包括与5G的融合、新
艺术照明的革新:掌握Art-Net技术的7大核心优势
# 摘要
Art-Net作为一种先进的网络照明控制技术,其发展历程、理论基础、应用实践及优势展示构成了本文的研究核心。本文首先概述了Art-Net技术,随后深入分析了其理论基础,包括网络照明技术的演变、Art-Net协议架构及控制原理。第三章聚焦于Art-Net在艺术照明中的应用,从设计项目到场景创造,再到系统的调试与维护,详尽介绍了艺术照
【ANSYS网格划分详解】:一文掌握网格质量与仿真的秘密关系

# 摘要
ANSYS作为一款强大的工程仿真软件,其网格划分技术在保证仿真精度与效率方面发挥着关键作用。本文系统地介绍了ANSYS网格划分的基础知识、不同网格类型的选择依据以及尺寸和密度对仿真结果的影响。进一步,文章探讨了高级网格划分技术,包括自适应网
【STAR-CCM+网格划分进阶】:非流线型表面处理技术核心解析
# 摘要
本文对STAR-CCM+软件中的网格划分技术进行了全面的介绍,重点探讨了针对非流线型表面的网格类型选择及其特点、挑战,并提供了实操技巧和案例研究。文章首先介绍了网格划分的基础知识,包括不同类型的网格(结构化、非结构化、混合网格)及其应用。随后,深入分析了非流线型表面的特性,以及在网格划分过程中可能遇到的问题,并探讨了高级网格技术如局部加密与细化。实
【智能车竞赛秘籍】:气垫船控制系统架构深度剖析及故障快速修复技巧

# 摘要
气垫船作为一种先进的水上交通工具,其控制系统的设计与实现对于性能和安全性至关重要。本文首先概述了气垫船控制系统的基础理论,接着详细分析了硬件组成及其交互原理,包括动力系统的协同工作、传感器应用以及通信与数据链路的安全机制。第三章深入探讨了气垫船软件架构的设计,涵盖了实时操作系统的配置、控制算法的实现以及软件测试与验证。故障诊断与快速修复技术在第四章被讨论,提供了
Java网络编程必备:TongHTP2.0从入门到精通的全攻略

# 摘要
随着网络技术的快速发展,Java网络编程在企业级应用中占据了重要地位。本文首先介绍了Java网络编程的基础知识,然后深入探讨了HTTP协议的核心原理、不同版本的特性以及工作方式。文章进一步阐释了TongHTTP2.0的安装、配置、客户端和服务器端开发的具体操作。在高级应用部分,本文详细讲解了如何在TongHTTP2.0中集成SSL/TLS以实现安全通信,如何优化性
【LabVIEW编程:电子琴设计全攻略】:从零开始到精通,掌握LabVIEW电子琴设计的终极秘诀
# 摘要
本文系统介绍了LabVIEW编程在信号处理、图形用户界面设计以及电子琴项目中的应用。首先,阐述了LabVIEW编程基础和信号处理的基本知识,包括数字信号的生成、采样与量化,以及声音合成技术和数字滤波器设计。接着,深入探讨了LabVIEW编程图形用户界面的设计原则,交互式元素的实现以及响应式和自适应设计方法。最后,通过LabVIEW电子琴项目实战,分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )