揭秘OpenCV图像分割算法:原理、实现与10个实战应用
发布时间: 2024-08-10 04:50:07 阅读量: 279 订阅数: 26 

OpenCV图像分割中的分水岭算法原理与应用详解

# 1. OpenCV图像分割算法概述
图像分割是计算机视觉中一项重要的技术,它将图像分解为具有相似特征的区域或对象。OpenCV(Open Source Computer Vision Library)是一个广泛使用的计算机视觉库,它提供了丰富的图像分割算法。
OpenCV中的图像分割算法可以分为三大类:基于阈值的分割、基于区域的分割和基于边缘的分割。基于阈值的分割根据像素的强度或颜色将图像分割为不同的区域。基于区域的分割将图像分割为具有相似特征(例如颜色、纹理或形状)的区域。基于边缘的分割通过检测图像中的边缘来分割图像。
# 2. 图像分割算法原理
### 2.1 基于阈值的分割
基于阈值的分割是一种简单而有效的图像分割方法,它通过设置一个阈值将图像像素分为前景和背景两类。
#### 2.1.1 全局阈值分割
全局阈值分割使用一个单一的阈值来分割整个图像。如果像素值大于阈值,则将其归为前景;否则,归为背景。这种方法简单易用,但对于具有复杂光照条件或背景不均匀的图像效果不佳。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值
threshold = 127
# 全局阈值分割
_, binary = cv2.threshold(gray, threshold, 255, cv2.THRESH_BINARY)
# 显示分割后的图像
cv2.imshow('Binary Image', binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.threshold()` 函数进行全局阈值分割,`threshold` 参数指定阈值。
* `THRESH_BINARY` 参数表示二值化,高于阈值的像素设置为 255(白色),低于阈值的像素设置为 0(黑色)。
#### 2.1.2 局部阈值分割
局部阈值分割根据图像的局部区域动态调整阈值。它可以更好地处理具有不均匀光照或背景的图像。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 局部阈值分割
binary = cv2.adaptiveThreshold(gray, 255, cv2.ADAPTIVE_THRESH_MEAN_C, cv2.THRESH_BINARY, 11, 2)
# 显示分割后的图像
cv2.imshow('Binary Image', binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.adaptiveThreshold()` 函数进行局部阈值分割,`ADAPTIVE_THRESH_MEAN_C` 参数表示使用局部均值作为阈值。
* `11` 和 `2` 参数分别指定邻域大小和阈值偏移量。
### 2.2 基于区域的分割
基于区域的分割将图像分割成具有相似属性(如颜色、纹理)的连通区域。
#### 2.2.1 区域生长
区域生长算法从一个种子点开始,并逐渐将具有相似属性的相邻像素添加到该区域。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 区域生长分割
segmented = cv2.watershed(gray, markers=np.zeros((gray.shape[0], gray.shape[1]), dtype=np.int32), mask=None)
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.watershed()` 函数进行区域生长分割,`markers` 参数指定种子点,`mask` 参数指定分割区域的边界。
* 算法从种子点开始,并逐渐将具有相似灰度值的相邻像素添加到该区域,直到遇到边界或其他区域。
#### 2.2.2 分水岭算法
分水岭算法将图像视为一个地形,其中像素值代表高度。算法从种子点开始,并逐渐将像素分配到不同的流域,直到遇到分水岭(即不同流域之间的边界)。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 分水岭算法分割
segmented = cv2.watershed(gray, markers=np.zeros((gray.shape[0], gray.shape[1]), dtype=np.int32), mask=None)
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.watershed()` 函数进行分水岭算法分割,`markers` 参数指定种子点,`mask` 参数指定分割区域的边界。
* 算法从种子点开始,并逐渐将像素分配到不同的流域,直到遇到分水岭。
### 2.3 基于边缘的分割
基于边缘的分割检测图像中的边缘,并使用这些边缘将图像分割成不同的区域。
#### 2.3.1 Canny边缘检测
Canny边缘检测是一种广泛使用的边缘检测算法,它使用高斯滤波器平滑图像,然后使用 Sobel 算子计算图像梯度。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Canny边缘检测
edges = cv2.Canny(gray, 100, 200)
# 显示边缘检测后的图像
cv2.imshow('Edges Image', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.Canny()` 函数进行 Canny 边缘检测,`100` 和 `200` 参数分别指定低阈值和高阈值。
* 低阈值用于检测弱边缘,高阈值用于抑制噪声。
#### 2.3.2 Hough变换
Hough变换是一种用于检测直线、圆形和椭圆形等规则形状的边缘检测算法。
```python
import cv2
import numpy as np
# 读取图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# Hough变换检测直线
lines = cv2.HoughLinesP(gray, 1, np.pi / 180, 100, minLineLength=100, maxLineGap=10)
# 绘制检测到的直线
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 显示检测到的直线
cv2.imshow('Lines Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑分析:**
* `cv2.HoughLinesP()` 函数进行 Hough 变换检测直线,`1` 参数指定霍夫空间的分辨率,`np.pi / 180` 参数指定角度分辨率。
* `100` 参数指定检测到的直线最小长度,`10` 参数指定检测到的直线最大间隙。
* 算法通过在霍夫空间中找到直线的峰值来检测直线。
# 3. 图像分割算法实现
### 3.1 OpenCV图像分割函数
OpenCV提供了丰富的图像分割函数,涵盖了基于阈值、基于区域和基于边缘的分割算法。这些函数简化了图像分割的实现,使开发人员能够轻松地将图像分割技术集成到他们的应用程序中。
#### 3.1.1 cv2.threshold()
`cv2.threshold()`函数用于基于阈值的图像分割。它将图像像素值二值化为0或255,具体取决于像素值是否高于或低于给定的阈值。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值
threshold = 127
# 二值化图像
binary = cv2.threshold(gray, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示二值化图像
cv2.imshow('Binary Image', binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 3.1.2 cv2.connectedComponents()
`cv2.connectedComponents()`函数用于基于区域的图像分割。它将图像中的连通区域(具有相同像素值的像素组)标识为不同的标签。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用区域生长算法
labels, num_labels = cv2.connectedComponents(gray)
# 创建掩码图像
mask = np.zeros(image.shape[:2], dtype=np.uint8)
mask[labels == 1] = 255
# 显示掩码图像
cv2.imshow('Mask Image', mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 3.1.3 cv2.watershed()
`cv2.watershed()`函数用于基于边缘的图像分割。它将图像中的局部极小值作为种子点,并通过模拟水域泛滥来分割图像。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用Canny边缘检测
edges = cv2.Canny(gray, 100, 200)
# 设置种子点
seeds = np.zeros(image.shape[:2], dtype=np.int32)
seeds[100, 100] = 1
# 应用分水岭算法
markers = cv2.watershed(image, seeds)
# 创建掩码图像
mask = np.zeros(image.shape[:2], dtype=np.uint8)
mask[markers == 1] = 255
# 显示掩码图像
cv2.imshow('Mask Image', mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 3.2 图像分割算法实践
#### 3.2.1 基于阈值的分割实现
基于阈值的分割是将图像像素值二值化为0或255,具体取决于像素值是否高于或低于给定的阈值。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值
threshold = 127
# 二值化图像
binary = cv2.threshold(gray, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示二值化图像
cv2.imshow('Binary Image', binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 3.2.2 基于区域的分割实现
基于区域的分割将图像中的连通区域(具有相同像素值的像素组)标识为不同的标签。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用区域生长算法
labels, num_labels = cv2.connectedComponents(gray)
# 创建掩码图像
mask = np.zeros(image.shape[:2], dtype=np.uint8)
mask[labels == 1] = 255
# 显示掩码图像
cv2.imshow('Mask Image', mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
#### 3.2.3 基于边缘的分割实现
基于边缘的分割将图像中的局部极小值作为种子点,并通过模拟水域泛滥来分割图像。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 将图像转换为灰度
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 应用Canny边缘检测
edges = cv2.Canny(gray, 100, 200)
# 设置种子点
seeds = np.zeros(image.shape[:2], dtype=np.int32)
seeds[100, 100] = 1
# 应用分水岭算法
markers = cv2.watershed(image, seeds)
# 创建掩码图像
mask = np.zeros(image.shape[:2], dtype=np.uint8)
mask[markers == 1] = 255
# 显示掩码图像
cv2.imshow('Mask Image', mask)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
# 4. 图像分割算法实战应用
图像分割算法在实际应用中有着广泛的应用场景,本章将介绍图像分割算法在目标检测、图像分割和图像分析中的实战应用。
### 4.1 目标检测
目标检测是指在图像中识别和定位特定目标。图像分割算法可以为目标检测提供目标区域的分割,从而提高目标检测的准确性和效率。
#### 4.1.1 人脸检测
人脸检测是目标检测中常见且重要的应用。通过图像分割算法,可以将人脸区域从背景中分割出来,从而实现人脸检测。
```python
import cv2
# 读取图像
image = cv2.imread('face.jpg')
# 灰度化
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 使用 Haar 级联分类器进行人脸检测
face_cascade = cv2.CascadeClassifier(cv2.data.haarcascades + 'haarcascade_frontalface_default.xml')
faces = face_cascade.detectMultiScale(gray, 1.1, 4)
# 绘制人脸检测框
for (x, y, w, h) in faces:
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 255, 0), 2)
# 显示图像
cv2.imshow('Face Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑逐行解读:**
1. 读取图像并将其转换为灰度图像。
2. 使用 Haar 级联分类器检测人脸,该分类器是一种预训练的模型,可以识别图像中的人脸。
3. 对于检测到的人脸,绘制一个矩形框。
4. 显示检测结果图像。
#### 4.1.2 物体检测
物体检测与人脸检测类似,但其目标是检测图像中的任意物体。图像分割算法可以为物体检测提供物体区域的分割,从而提高物体检测的精度。
```python
import cv2
# 读取图像
image = cv2.imread('object.jpg')
# 创建 YOLOv3 对象检测器
net = cv2.dnn.readNet('yolov3.weights', 'yolov3.cfg')
# 设置输入图像尺寸
width = 416
height = 416
blob = cv2.dnn.blobFromImage(image, 1/255.0, (width, height), (0,0,0), swapRB=True, crop=False)
# 设置输入 blob 并进行前向传播
net.setInput(blob)
detections = net.forward()
# 解析检测结果
for detection in detections[0, 0]:
# 获取检测置信度
confidence = detection[2]
# 过滤置信度低的检测结果
if confidence > 0.5:
# 获取检测框坐标
x1, y1, x2, y2 = (detection[3:7] * [width, height, width, height]).astype(int)
# 绘制检测框
cv2.rectangle(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 显示图像
cv2.imshow('Object Detection', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑逐行解读:**
1. 读取图像并创建 YOLOv3 对象检测器。
2. 将图像转换为 YOLOv3 模型所需的输入 blob。
3. 设置输入 blob 并进行前向传播。
4. 解析检测结果,包括检测框坐标和置信度。
5. 过滤置信度低的检测结果。
6. 绘制检测框。
7. 显示检测结果图像。
### 4.2 图像分割
图像分割是指将图像划分为不同的区域,每个区域代表一个不同的对象或区域。图像分割算法可以用于提取图像中的感兴趣区域,例如前景或背景。
#### 4.2.1 前景分割
前景分割是指将图像中的前景区域从背景中分割出来。图像分割算法可以用于前景分割,从而提取图像中的主要对象。
```python
import cv2
# 读取图像
image = cv2.imread('foreground.jpg')
# 转换为 HSV 颜色空间
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
# 创建掩码,将饱和度和值低于阈值的像素设置为黑色
mask = cv2.inRange(hsv, (0, 0, 0), (180, 255, 255))
# 使用形态学操作去除噪声
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)))
# 提取前景
foreground = cv2.bitwise_and(image, image, mask=mask)
# 显示图像
cv2.imshow('Foreground Segmentation', foreground)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑逐行解读:**
1. 读取图像并转换为 HSV 颜色空间。
2. 创建一个掩码,将饱和度和值低于阈值的像素设置为黑色。
3. 使用形态学操作去除噪声。
4. 使用掩码提取前景。
5. 显示分割后的前景图像。
#### 4.2.2 背景分割
背景分割是指将图像中的背景区域从前景中分割出来。图像分割算法可以用于背景分割,从而提取图像中的背景。
```python
import cv2
# 读取图像
image = cv2.imread('background.jpg')
# 转换为 Lab 颜色空间
lab = cv2.cvtColor(image, cv2.COLOR_BGR2Lab)
# 创建掩码,将亮度低于阈值的像素设置为白色
mask = cv2.inRange(lab[:, :, 0], 0, 128)
# 使用形态学操作去除噪声
mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)))
# 提取背景
background = cv2.bitwise_and(image, image, mask=mask)
# 显示图像
cv2.imshow('Background Segmentation', background)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**代码逻辑逐行解读:**
1. 读取图像并转换为 Lab 颜色空间。
2. 创建一个掩码,将亮度低于阈值的像素设置为白色。
3. 使用形态学操作去除噪声。
4. 使用掩码提取背景。
5. 显示分割后的背景图像。
### 4.3 图像分析
图像分析是指从图像中提取有意义的信息。图像分割算法可以用于图像分析,例如图像分类和聚类。
#### 4.3.1 图像分类
图像分类是指将图像分配到特定类别。图像分割算法可以用于图像分类,例如将图像分类为风景、人像或动物。
```python
import cv2
from sklearn.svm import SVC
from sklearn.preprocessing import StandardScaler
# 读取图像并提取特征
images = []
labels = []
for i in range(100):
image = cv2.imread(f'image{i}.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
hist = cv2.calcHist([gray], [0], None, [256], [0, 256])
images.append(hist.flatten())
labels.append(i//10)
# 标准化数据
scaler = StandardScaler()
images = scaler.fit_transform(images)
# 训练 SVM 分类器
clf = SVC()
clf.fit(images, labels)
# 预测图像类别
image = cv2.imread('new_image.jpg')
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
hist = cv2.calcHist([gray], [0], None, [256], [0, 256])
features = scaler.transform([hist.flatten()])
prediction = clf.predict(features)
print(f'Predicted category: {prediction[0]}')
```
**代码逻辑逐行解读:**
1. 读取图像并提取特征,例如直方图。
2. 标准化数据。
3. 训练 SVM 分类器。
4. 预测图像类别。
#### 4.3.2 图像聚类
图像聚类是指将图像分组到具有相似特征的组中。图像分割算法可以用于图像聚类,例如将图像聚类为不同的对象或场景。
```python
import cv2
from sklearn.cluster import KMeans
# 读取图像并提取特征
images = []
for i in range(100):
image = cv2.imread(f'image{i}.jpg')
gray = cv2
# 5. OpenCV图像分割算法进阶
### 5.1 深度学习图像分割
传统图像分割算法虽然在特定场景下取得了较好的效果,但其泛化能力有限,且对噪声和光照变化敏感。近年来,深度学习技术在图像分割领域取得了突破性的进展,能够有效解决传统算法的局限性。
#### 5.1.1 U-Net模型
U-Net是一种针对生物医学图像分割而设计的深度学习模型,其网络结构呈U形,由编码器和解码器组成。编码器负责提取图像特征,解码器负责恢复图像分割结果。U-Net模型具有以下优点:
- **端到端训练:**模型直接从原始图像输入到分割结果输出,无需中间特征提取或预处理。
- **跳跃连接:**编码器和解码器之间通过跳跃连接相连,使解码器能够利用编码器提取的丰富特征信息。
- **高精度:**U-Net模型能够实现像素级的精确分割,在生物医学图像分割领域取得了广泛应用。
#### 5.1.2 DeepLab模型
DeepLab模型是一种基于卷积神经网络的图像分割模型,其主要特点是采用空洞卷积(Atrous Convolution)来扩大卷积核的感受野,从而获取更全局的信息。DeepLab模型具有以下优点:
- **大感受野:**空洞卷积可以有效扩大感受野,使模型能够捕获图像中的全局上下文信息。
- **多尺度特征融合:**DeepLab模型通过不同尺度的空洞卷积提取多尺度特征,并进行融合,提高分割精度。
- **广泛应用:**DeepLab模型在自然图像分割、遥感图像分割等领域取得了良好的效果。
### 5.2 图像分割评估
图像分割算法的评估是衡量其性能的重要指标,常用的评估指标包括:
- **像素精度(Pixel Accuracy):**分割结果中正确分类像素的比例。
- **平均交并比(Mean Intersection over Union,mIoU):**分割结果与真实分割结果交集面积与并集面积的平均值。
- **帕斯卡尔VOC指标(Pascal VOC Metrics):**包括平均精度(Average Precision,AP)、平均召回率(Average Recall,AR)和平均交并比(mIoU)。
图像分割评估方法主要有:
- **人工评估:**由人工对分割结果进行标注,计算评估指标。
- **自动评估:**使用预先标注好的数据集,自动计算评估指标。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到基于 OpenCV 的图像处理专栏!本专栏将带您踏上图像处理之旅,从基础知识到高级技术,为您提供打造图像处理专家所需的全面指南。
我们将深入探讨 OpenCV 的图像分割算法,揭开人脸检测和识别的奥秘,并掌握图像增强技术。此外,您还将了解图像配准和拼接,视频处理,以及 OpenCV 在医疗、工业、无人驾驶、安防、机器人、虚拟现实、增强现实、遥感和医学成像等领域的广泛应用。
通过 15 个实战案例,您将亲身体验 OpenCV 的强大功能,解决图像处理难题,并打造智能解决方案。无论您是图像处理新手还是经验丰富的专业人士,本专栏都将为您提供宝贵的见解和实用技巧,助力您成为图像处理领域的专家。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【ILWIS3.8空间分析功能全解析】:深度解读与应用案例

# 摘要
本文全面介绍ILWIS 3.8在空间分析领域的应用和功能。首先概述了ILWIS 3.8的空间分析框架及其基础功能和数据管理能力,包括对空间数据格式的支持、图层的创建与编辑,以及空间数据库的管理。接着深入探讨了ILWIS 3.8的核心空间分析功能,如缓冲区分析、网络分析与路径规划、地统计分析与地形模型,以及土地覆盖分类与变化检测技术。随后,文章通过应用实践章节展示了ILWIS 3.8
【Nextcloud深度剖析】:Windows服务器上的安装、优化与故障处理案例
# 摘要
Nextcloud作为一个开源的云存储解决方案,为用户提供了在私有服务器上存储和分享文件的平台。本文首先介绍了Nextcloud的基本概念及安装流程,然后详细探讨了其配置与管理,包括配置文件结构、用户权限设置以及应用扩展和集成。接着,本文着重分析了Nextcloud的性能优化方法,包括性能监控、调优、高可用性部署以及缓存与存储优化。在安全加固与故障排查章节,文章讨论了
【Python编程提升指南】:掌握AssimpCy,高效处理3D模型的10大技巧

# 摘要
本文主要探讨了Python编程在3D模型处理中的应用,特别是通过AssimpCy库实现的高效加载、变换和渲染。文章首先介绍了3D图形编程的基本概念及其在Python中的应用,随后详细阐述了AssimpCy库的安装、配置和核心数据结构解析。在此基础
【测量平差程序的优化】:性能提升与资源管理的高效策略
# 摘要
本文概述了测量平差程序优化的重要性,并深入探讨了相关理论基础与算法优化。首先,分析了平差问题的数学模型和最小二乘法的应用,然后对算法效率进行了理论分析,着重于计算复杂度和精度与效率之间的权衡。高效算法设计包括矩阵运算优化和迭代与直接算法的选择。在性能优化实践方面,探讨了代码级优化策略、多线程与并行计算的应用以及性能测试与评估。资源管理与优化章节则涵盖了内存管理、数
【Hybrid TKLBIST问题速解】:5大常见难题,一步到位的解决方案

# 摘要
Hybrid TKLBIST是一种结合了传统测试技术与现代测试方法的综合测试框架,它的基本概念、理论基础、常见难题以及实践应用是本文的研究重点。本文首先介绍了Hybrid TKLBIST的定义、原理及核心测试方法论,
【Stable Diffusion参数调优宝典】:专家级别的调整与优化
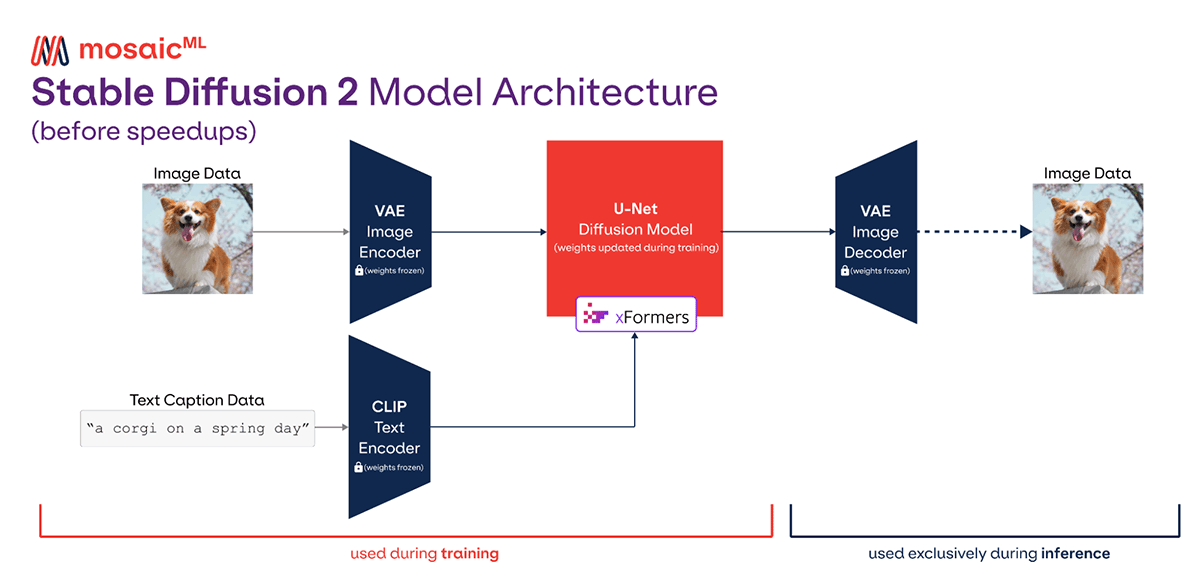
# 摘要
Stable Diffusion模型作为一种深度学习生成模型,广泛应用于图像和文本生成等领域。本文旨在全面概述Stable Diffusion模型的基本概念、参数体系及调优技术。文章首先介绍了Stable Diffusion的结构与调优基础,然后深入探讨了其参数体系,包括参数的定义、类型和调优过程中的理论基础,如梯
项目时间管理新策略:华为无线搬迁案例中的WBS应用详解
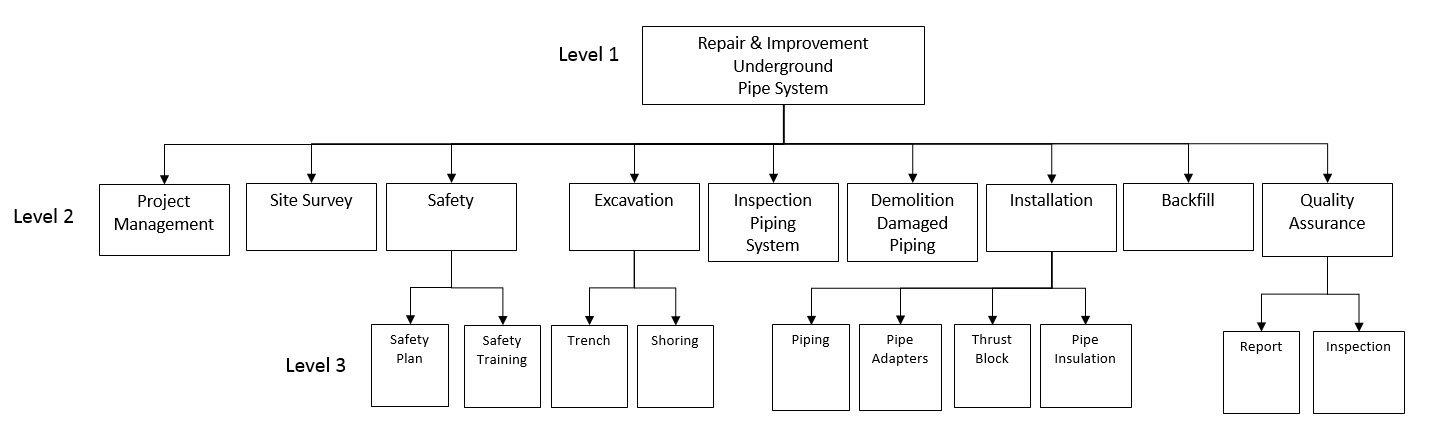
# 摘要
本文通过项目时间管理的理论基础探讨,详细阐述了WBS(工作分解结构)的概念、重要性、创建原则以及技巧,并将这些理论应用于华为无线搬迁案例中。通过对项目背景与目标的介绍,分析了搬迁项目的复杂性,并具体说明了如何设计WBS结构,结合时间计划,并进行跟踪和控制。文中还分析了项目时间管理的改进成果和WBS应用的深入分析。最后,针对WBS策略的优化与未来发展趋势进行了
【C#实践指南】:如何高效处理DXF文件数据
# 摘要
C#作为一门流行的应用程序开发语言,在处理DXF(Drawing Exchange Format)文件数据方面展现出了强大的功能。本文旨在介绍和分析C#在DXF文件数据处理中的各种技术和方法。通过深入探讨DXF文件格式、分析现有处理库和工具,并提供具体的编程实践,文章展示了从读取、编辑到高级应用的完整处理流程。本文还包含了案例研究,分析了真实世界中的需求、实现策略以及问题解决,旨在为开发者提供宝贵的经验和见解。文章的最后展望了未来技术趋势,
【信号完整性保障】:多输入时序电路信号完整性维护技巧

# 摘要
信号完整性是高性能电子系统设计中的关键因素,直接影响到电路的稳定性和性能。本文首先介绍了信号完整性的重要性和基本概念,然后深入探讨了信号完整性的理论基础,包括信号传输线效应、串扰以及电源噪声等问题。接着,本文分析了多输入时序电路面临的信号完整性挑战,并提出了相应的布线策略。第四章讨论了信号完整性维护的技术实践,涉及测试与仿真方法以及问题调试。文章进一步阐述了信号完整
【程控交换软件故障快速诊断】:用户摘挂机识别异常的检测与即时修复指南

# 摘要
程控交换软件故障的快速诊断对于确保通信系统稳定运行至关重要。本文概述了程控交换软件故障快速诊断的方法与实践应用,详细探讨了用户摘挂机识别异常的理论基础、检测技术、即时修复方法,并分析了这些异常对通话质量与系统性能的影响。文章进一步阐述了检测工具与流程的实现、常见异常的检测实例以及软件和硬件层面的修复策略。在实践应用方面,提供了现场与远程故
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )