实战:使用TensorFlow进行目标定位
发布时间: 2024-01-11 00:59:11 阅读量: 89 订阅数: 36 
# 1. 介绍TensorFlow目标定位技术
## 1.1 什么是目标定位
目标定位是计算机视觉领域中的一项重要任务,它的目标是在图像或视频中准确地定位出感兴趣目标的位置。具体来说,目标定位是指通过计算机算法,将图像或视频中的目标物体进行定位标记,使得我们可以准确地知道目标物体在图像中的位置。
在目标定位任务中,通常会使用边界框(Bounding Box)来表示目标的位置。边界框是一个矩形框,它通过左上角和右下角两个点的坐标来确定。通过准确地定位目标的边界框,我们可以实现对图像中目标的准确检测和定位。
## 1.2 TensorFlow在目标定位中的应用
TensorFlow是一个开源的人工智能框架,它提供了丰富的工具和库,可以用于构建和训练各种深度学习模型。在目标定位任务中,TensorFlow可以帮助我们构建高效的目标定位模型,并进行模型的训练和调优。
TensorFlow提供了一系列强大的API和工具,如TensorFlow Object Detection API,可以帮助我们快速搭建目标定位模型。该API提供了各种经典的目标定位算法的实现,比如Faster R-CNN,SSD等。同时,TensorFlow还提供了丰富的数据处理和模型评估工具,使得目标定位任务的开发和调试变得更加高效和便捷。
## 1.3 目标定位的重要性和应用场景
目标定位作为计算机视觉中的核心任务之一,具有广泛的应用场景和重要性。首先,目标定位可以用于目标检测和识别任务,如人脸识别、车牌识别、物体识别等。通过准确地定位出图像中的目标物体,可以实现更准确和可靠的目标识别和分类。
其次,目标定位在图像检索和图像搜索中也扮演着重要的角色。通过对图像中的目标进行定位,可以方便地进行图像库的检索和相似性匹配。这在很多大规模图像数据处理和搜索引擎中都发挥着重要作用。
此外,目标定位还被广泛应用于无人驾驶、智能监控、医学影像分析等领域。通过对交通标志、行人、车辆等目标的准确定位,可以帮助无人驾驶车辆做出正确的决策和行驶规划。在智能监控系统中,准确的目标定位可以提高监控效果,并帮助保障公共安全。在医学影像分析领域,对病灶、器官的准确定位可以帮助医生做出更准确的诊断和治疗方案。
综上所述,目标定位技术在各种领域中具有重要应用价值,其准确性和实时性对于实际应用非常关键。下面,我们将介绍如何准备工作和搭建环境,以开始TensorFlow目标定位的学习和实践。
# 2. 准备工作和环境搭建
在开始使用TensorFlow进行目标定位之前,我们需要进行一些准备工作和环境搭建。本章将介绍如何准备工作,并安装TensorFlow的环境,以及数据集的准备和预处理。
### 2.1 准备工作概述
在进行目标定位之前,我们需要明确一些准备工作,以确保顺利进行任务。
首先,您需要具备一定的编程基础和机器学习的相关知识。了解Python编程语言以及TensorFlow的基本概念和使用方法将对您有所帮助。
其次,您需要确定您的目标定位任务的具体要求和场景。不同的目标定位任务可能需要采集不同的数据集,选择不同的算法和模型。
最后,您需要确定您的开发环境和硬件设备。TensorFlow可以在多种操作系统上运行,包括Windows、Linux和macOS。同时,您还需要考虑是否需要使用GPU加速进行训练和推理。如果您具备一定的硬件条件,可以考虑使用GPU进行加速,以提高模型的训练和推理性能。
### 2.2 安装TensorFlow环境
安装TensorFlow环境是进行深度学习任务的第一步。下面是在Python环境下安装TensorFlow的步骤:
1. 确保您已经安装了Python的相关包管理工具,如pip或conda。
2. 打开命令行终端,输入以下命令安装TensorFlow:
```python
pip install tensorflow
```
3. 等待安装完成,验证TensorFlow是否成功安装,可以在命令行终端中输入以下命令:
```python
import tensorflow as tf
print(tf.__version__)
```
如果成功输出了TensorFlow的版本号,则说明安装成功。
### 2.3 数据集准备与预处理
在进行目标定位之前,我们需要准备好相应的数据集,并对数据集进行预处理。
首先,您需要收集一些与目标定位任务相关的数据集。数据集可以是标注了目标位置的图像数据,或者是视频数据。您可以通过在互联网上搜索相应的数据集,或者自己采集和标注数据集。
然后,对数据集进行预处理。预处理的目的是将数据集转换成合适的格式,并进行数据增强和标准化等操作,以提高模型的泛化性能。常见的数据预处理操作包括图像缩放、裁剪和归一化等。
在TensorFlow中,您可以使用相关的API和工具来进行数据集的准备和预处理,如`tf.data`模块和`tf.image`模块。
```python
import tensorflow as tf
import tensorflow_datasets as tfds
# 加载数据集
dataset = tfds.load('dataset_name', split='train')
# 数据预处理
dataset = dataset.map(preprocess_fn)
dataset = dataset.shuffle(buffer_size=1000)
# 构建输入管道
dataset = dataset.batch(batch_size)
dataset = dataset.prefetch(buffer_size=tf.data.experimental.AUTOTUNE)
# 模型训练
model.fit(dataset, epochs=num_epochs)
```
通过以上步骤,您就可以完善数据集的准备和预处理工作,为接下来的目标定位任务做好准备。
在本章中,我们介绍了准备工作和环境搭建的相关内容。通过准备工作和安装TensorFlow环境,以及进行数据集的准备和预处理,您已经做好了使用TensorFlow进行目标定位的准备工作。在接下来的章节中,我们将深入介绍TensorFlow目标定位的基础知识和实战案例。
# 3. TensorFlow目标定位基础
在本章中,我们将回顾一些TensorFlow基础知识,并介绍目标检测与定位的区别,以及一些相关的算法。
### 3.1 TensorFlow基础知识回顾
TensorFlow是一个开源的机器学习框架,由Google开发并维护。它提供了一个灵活且高度可扩展的平台,用于构建和训练各种深度学习模型。
在TensorFlow中,模型的建立和训练通常遵循以下步骤:
- 定义模型的输入和输出
- 定义模型的结构和参数
- 定义优化器和损失函数
- 进行模型训练和评估
TensorFlow使用计算图的形式来表示模型,其中节点表示操作,边表示数据流。使用TensorFlow的优势之一是可以利用GPU进行高效的并行计算,从而加速模型的训练过程。
### 3.2 目标检测与定位的区别
目标检测和目标定位是计算机视觉领域中两个关键任务,它们之间存在一些差异。
目标检测的任务是在图像中识别和定位多个对象的位置和类别。通常,目标检测涉及到对图像进行分割和分类,可以使用各种算法和模型来实现,如卷积神经网络(CNN),区域卷积神经网络(R-CNN)等。
目标定位的任务是在图像中准确地定位对象的位置,通常指定一个边界框来描述对象的位置。目标定位通常是在目标检测任务的基础上进行,它更注重于对象的边界定位和精确检测。
### 3.3 相关算法介绍
在目标定位中,有几种常用的算法可以使用:
- 卷积神经网络(CNN):它是深度学习中最常用的算法之一,可用于图像识别和目标定位任务。
- 区域卷积神经网络(R-CNN):它是一种基于卷积神经网络的目标检测算法,可以实现目标定位任务。
- 目标定位算法:一些特定的算法专门用于目标定位任务,如边界框回归算法、多尺度搜索算法等。
这些算法可以结合使用,以提高目标定位的准确性和性能。在接下来的章节中,我们将详细介绍如何使用TensorFlow实现目标定位,并利用这些算法进行模型训练与优化。
希望本章的介绍能够帮助读者理解TensorFlow目标定位的基础知识,为后续内容的学习与实践打下基础。在下一章节中,我们将开始进行实战,构建目标定位模型并进行训练调优。
# 4. 使用TensorFlow进行目标定位实战
目标定位是计算机视觉领域的重要应用之一,在实际应用中经常需要使用深度学习技术来进行目标定位。TensorFlow作为当前流行的深度学习框架之一,提供了丰富的工具和库用于目标定位的实战操作。本章将带领读者深入了解如何使用TensorFlow进行目标定位的实际操作。
#### 4.1 构建目标定位模型
在使用TensorFlow进行目标定位的实战中,首先需要构建目标定位模型。模型的构建通常包括网络结构设计、损失函数定义和优化器选择等步骤。下面是一个简单的使用TensorFlow构建目标定位模型的示例代码(使用Python语言):
```python
import tensorflow as tf
# 定义目标定位模型网络结构
def target_locating_model(inputs):
# 构建深度卷积神经网络
conv1 = tf.layers.conv2d(inputs, filters=32, kernel_size=3, activation=tf.nn.relu, padding='same')
pool1 = tf.layers.max_pooling2d(conv1, pool_size=2, strides=2, padding='same')
conv2 = tf.layers.conv2d(pool1, filters=64, kernel_size=3, activation=tf.nn.relu, padding='same')
pool2 = tf.layers.max_pooling2d(conv2, pool_size=2, strides=2, padding='same')
# 连接全连接层
flattened = tf.layers.flatten(pool2)
fc1 = tf.layers.dense(flattened, 128, activation=tf.nn.relu)
# 输出定位结果
output = tf.layers.dense(fc1, 4) # 假设输出为4个坐标值
return output
# 构建模型输入
inputs = tf.placeholder(tf.float32, shape=[None, 224, 224, 3]) # 假设输入大小为224x224x3
# 构建模型输出
output = target_locating_model(inputs)
# 定义损失函数和优化器
labels = tf.placeholder(tf.float32, shape=[None, 4]) # 假设标签为4个坐标值
loss = tf.losses.mean_squared_error(labels, output)
optimizer = tf.train.AdamOptimizer(learning_rate=0.001).minimize(loss)
```
上述代码实现了一个简单的目标定位模型的构建过程,包括了网络结构的设计、损失函数的定义和优化器的选择。
#### 4.2 模型训练与调优
模型构建完成后,接下来需要进行模型的训练与调优。在TensorFlow中,通常需要使用数据集来进行模型的训练,在训练过程中还需要进行超参数的调优。下面是一个简单的使用TensorFlow进行模型训练与调优的示例代码(使用Python语言):
```python
# 导入数据集
from sklearn.model_selection import train_test_split
X_train, X_test, y_train, y_test = train_test_split(data, labels, test_size=0.2, random_state=42)
# 开始训练模型
with tf.Session() as sess:
sess.run(tf.global_variables_initializer())
for epoch in range(num_epochs):
_, train_loss = sess.run([optimizer, loss], feed_dict={inputs: X_train, labels: y_train})
if epoch % 100 == 0:
print("Epoch {}, Training Loss: {}".format(epoch, train_loss))
# 在测试集上评估模型性能
test_loss = sess.run(loss, feed_dict={inputs: X_test, labels: y_test})
print("Test Loss: {}".format(test_loss))
```
上述代码展示了如何使用TensorFlow进行模型的训练与调优,包括了数据集的导入、模型的训练过程以及在测试集上评估模型性能。
#### 4.3 模型评估与性能优化
完成模型训练后,需要对模型进行评估并进行性能优化。在TensorFlow中,可以通过评估指标和可视化工具来对模型进行性能评估和优化。下面是一个简单的使用TensorFlow进行模型评估与性能优化的示例代码(使用Python语言):
```python
# 模型评估
with tf.Session() as sess:
# 运行模型在测试集上的输出
predictions = sess.run(output, feed_dict={inputs: X_test})
# 计算模型的性能指标,比如均方误差、准确率等
# ...
# 模型性能可视化
import matplotlib.pyplot as plt
# 可视化模型预测结果和真实标签
# ...
```
上述代码展示了如何使用TensorFlow进行模型的评估和性能优化,包括了模型在测试集上的输出计算和模型性能可视化的操作。
通过本章的实战操作,读者可以深入了解如何使用TensorFlow进行目标定位模型的构建、训练与优化,从而在实际应用中更好地利用TensorFlow进行目标定位任务的处理和优化。
# 5. 高级应用与技巧
在本章中,我们将深入探讨TensorFlow目标定位技术的高级应用和一些实用的技巧,包括迁移学习在目标定位中的应用,目标定位技巧与优化策略,以及结合目标定位的实际案例分析。
#### 5.1 迁移学习在目标定位中的应用
迁移学习是指利用已有模型的知识来加速新模型的训练过程,同时提高模型的准确性。在目标定位中,我们可以通过迁移学习来利用在大规模数据集上预训练的模型,然后针对特定任务进行微调,以达到更好的目标定位效果。
下面是一个示例代码,演示了如何使用TensorFlow进行目标定位的迁移学习:
```python
import tensorflow as tf
from tensorflow.keras.applications import VGG16
from tensorflow.keras.layers import Dense, Flatten
from tensorflow.keras.models import Model
from tensorflow.keras.optimizers import Adam
from tensorflow.keras.preprocessing.image import ImageDataGenerator
# 加载预训练的VGG16模型,去掉顶部的全连接层
base_model = VGG16(weights='imagenet', include_top=False, input_shape=(224, 224, 3))
# 冻结VGG16模型的权重
for layer in base_model.layers:
layer.trainable = False
# 添加定位任务的顶部层
x = Flatten()(base_model.output)
x = Dense(512, activation='relu')(x)
predictions = Dense(num_classes, activation='softmax')(x)
# 构建完整模型
model = Model(inputs=base_model.input, outputs=predictions)
# 编译模型
model.compile(optimizer=Adam(lr=0.001), loss='categorical_crossentropy', metrics=['accuracy'])
# 进行微调训练
history = model.fit(train_generator, epochs=10, validation_data=val_generator)
```
通过上述代码,我们可以实现对VGG16模型的微调训练,以适应特定的目标定位任务,这是迁移学习在目标定位中的应用之一。
#### 5.2 目标定位技巧与优化策略
在实际的目标定位过程中,一些技巧和优化策略能够帮助我们提高定位的准确性和效率。例如,图像增强、多尺度检测、非极大值抑制(NMS)等技术都是常见的优化策略。下面是一个图像增强的示例代码:
```python
from tensorflow.keras.preprocessing.image import ImageDataGenerator
# 创建图像增强生成器
datagen = ImageDataGenerator(
rotation_range=20,
width_shift_range=0.2,
height_shift_range=0.2,
horizontal_flip=True,
vertical_flip=True,
rescale=1./255
)
# 使用生成器进行数据增强
augmented_data = datagen.flow(x_train, y_train, batch_size=32)
```
以上代码展示了如何使用`ImageDataGenerator`进行图像增强,通过旋转、平移、翻转等操作来增加训练数据的多样性,从而提高模型的泛化能力。
#### 5.3 结合目标定位的实陃案例分析
在本节中,我们将结合一个实际的案例分析,以展示目标定位技术在真实场景中的应用。我们将选取一个经典的物体检测与定位数据集,如Pascal VOC、COCO等,展示如何利用TensorFlow进行目标定位任务,并分析实验结果和应用场景。
通过结合案例分析,读者可以更加直观地了解目标定位技术的实际应用,以及在不同场景下的效果和局限性。
在本章中,我们探讨了TensorFlow目标定位技术的高级应用与技巧,包括迁移学习的应用、优化策略和实际案例分析。这些内容将有助于读者更深入地理解和应用目标定位技术。
希望以上内容对您有所帮助,如果有更多需求或疑问,欢迎随时交流讨论!
# 6. 未来发展和展望
在本章中,我们将讨论TensorFlow目标定位技术的未来发展趋势、在智能系统中的应用前景,以及未来发展方向和个人建议。
### 6.1 TensorFlow目标定位技术发展趋势
随着深度学习和计算机视觉领域的不断发展,TensorFlow目标定位技术也在不断演进。未来,预计会有以下趋势:
- **模型优化和效率提升**:随着硬件性能的提升和模型设计的优化,TensorFlow目标定位技术将更加高效和准确。
- **结合多模态信息**:未来的发展方向将包括整合多模态信息,如文本、语音和图像等,以实现更加综合的目标定位。
- **强化学习在目标定位中的应用**:强化学习作为一种强大的学习范式,将在目标定位领域发挥更大作用,实现更加智能化的目标定位系统。
### 6.2 目标定位在智能系统中的应用前景
随着人工智能技术的不断成熟和智能系统的广泛应用,TensorFlow目标定位技术也将发挥越来越重要的作用:
- **智能交通**:在智能交通系统中,目标定位技术可以帮助识别车辆、行人和交通标识,实现智能驾驶和交通管理。
- **智能安防**:在智能安防领域,目标定位技术可以用于人脸识别、行为分析等,提升安防系统的智能化水平。
- **医疗影像分析**:在医疗领域,目标定位技术可以帮助医生识别疾病病变和异常情况,辅助医疗影像的诊断与分析。
### 6.3 未来发展方向和个人建议
为了进一步推动TensorFlow目标定位技术的发展,我们可以:
- **加强跨学科合作**:与其他领域的专家合作,整合更多领域的知识和资源,推动目标定位技术的创新与突破。
- **注重数据隐私与安全**:在推动目标定位技术发展的过程中,应当注重数据隐私保护和安全问题,建立健全的数据安全机制。
- **培养人才与交流分享**:加强人才培养与学术交流,推动从业者之间的分享与合作,共同促进TensorFlow目标定位技术的快速发展。
通过以上方式,我们可以进一步拓展TensorFlow目标定位技术的应用领域,推动技术的不断创新和进步,为智能化社会的建设和发展做出更大的贡献。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏名为《TensorFlow之目标检测》,旨在深入探讨目标检测技术及其在TensorFlow框架下的应用。专栏内容包括从基础概念到实战操作的全方位介绍,如《深入理解目标检测技术概述》、《基于TensorFlow的目标检测入门教程》、《实战:使用TensorFlow进行目标定位》等。此外,还对目标检测中的关键技术进行了详细解析,包括图像预处理、数据增强、语义分割等,同时对深度学习与传统方法在目标检测中的比较、不平衡问题等也有深入探讨。专栏还介绍了一些最新的目标检测算法,包括单阶段目标检测算法速览、R-CNN系列算法解析、Faster R-CNN等。此外,还从硬件角度探讨了基于芯片的目标检测算法优化,以及多尺度目标检测等内容,力求为读者呈现一个全面系统的目标检测技术专栏。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【16位加法器设计秘籍】:全面揭秘高性能计算单元的构建与优化

# 摘要
本文对16位加法器进行了全面的研究和分析。首先回顾了加法器的基础知识,然后深入探讨了16位加法器的设计原理,包括二进制加法基础、组成部分及其高性能设计考量。接着,文章详细阐述
三菱FX3U PLC编程:从入门到高级应用的17个关键技巧

# 摘要
三菱FX3U PLC是工业自动化领域常用的控制器之一,本文全面介绍了其编程技巧和实践应用。文章首先概述了FX3U PLC的基本概念、功能和硬件结构,随后深入探讨了
【Xilinx 7系列FPGA深入剖析】:掌握架构精髓与应用秘诀
# 摘要
本文详细介绍了Xilinx 7系列FPGA的关键特性及其在工业应用中的广泛应用。首先概述了7系列FPGA的基本架构,包括其核心的可编程逻辑单元(PL)、集成的块存储器(BRAM)和数字信号处理(DSP)单元。接着,本文探讨了使用Xilinx工具链进行FPGA编程与配置的流程,强调了设计优化和设备配置的重要性。文章进一步分析了7系列FPGA在
【图像技术的深度解析】:Canvas转JPEG透明度保护的终极策略

# 摘要
随着Web技术的不断发展,图像技术在前端开发中扮演着越来越重要的角色。本文首先介绍了图像技术的基础和Canvas绘
【MVC标准化:肌电信号处理的终极指南】:提升数据质量的10大关键步骤与工具
# 摘要
MVC标准化是肌电信号处理中确保数据质量的重要步骤,它对于提高测量结果的准确性和可重复性至关重要。本文首先介绍肌电信号的生理学原理和MVC标准化理论,阐述了数据质量的重要性及影响因素。随后,文章深入探讨了肌电信号预处理的各个环节,包括噪声识别与消除、信号放大与滤波技术、以及基线漂移的校正方法。在提升数据质量的关键步骤部分,本文详细描述了信号特征提取、MVC标准化的实施与评估,并讨论了数据质量评估与优化工具。最后,本文通过实验设计和案例分析,展示了MVC标准化在实践应用中的具
ISA88.01批量控制:电子制造流程优化的5大策略

# 摘要
本文首先概述了ISA88.01批量控制标准,接着深入探讨了电子制造流程的理论基础,包括原材料处理、制造单元和工作站的组成部分,以及流程控制的理论框架和优化的核心原则。进一步地,本文实
【Flutter验证码动画效果】:如何设计提升用户体验的交互
# 摘要
随着移动应用的普及和安全需求的提升,验证码动画作为提高用户体验和安全性的关键技术,正受到越来越多的关注。本文首先介绍Flutter框架下验证码动画的重要性和基本实现原理,涵盖了动画的类型、应用场景、设计原则以及开发工具和库。接着,文章通过实践篇深入探讨了在Flutter环境下如何具体实现验证码动画,包括基础动画的制作、进阶技巧和自定义组件的开发。优化篇
ENVI波谱分类算法:从理论到实践的完整指南
# 摘要
ENVI软件作为遥感数据处理的主流工具之一,提供了多种波谱分类算法用于遥感图像分析。本文首先概述了波谱分类的基本概念及其在遥感领域的重要性,然后介绍了ENVI软件界面和波谱数据预处理的流程。接着,详细探讨了ENVI软件中波谱分类算法的实现方法,通过实践案例演示了像元级和对象级波谱分类算法的操作。最后,文章针对波谱分类的高级应用、挑战及未来发展进行了讨论,重点分析了高光谱数据分类和深度学习在波谱分类中的应用情况,以及波谱分类在土地覆盖制图和农业监测中的实际应用。
# 关键字
ENVI软件;波谱分类;遥感图像;数据预处理;分类算法;高光谱数据
参考资源链接:[使用ENVI进行高光谱分
【天线性能提升密籍】:深入探究均匀线阵方向图设计原则及案例分析
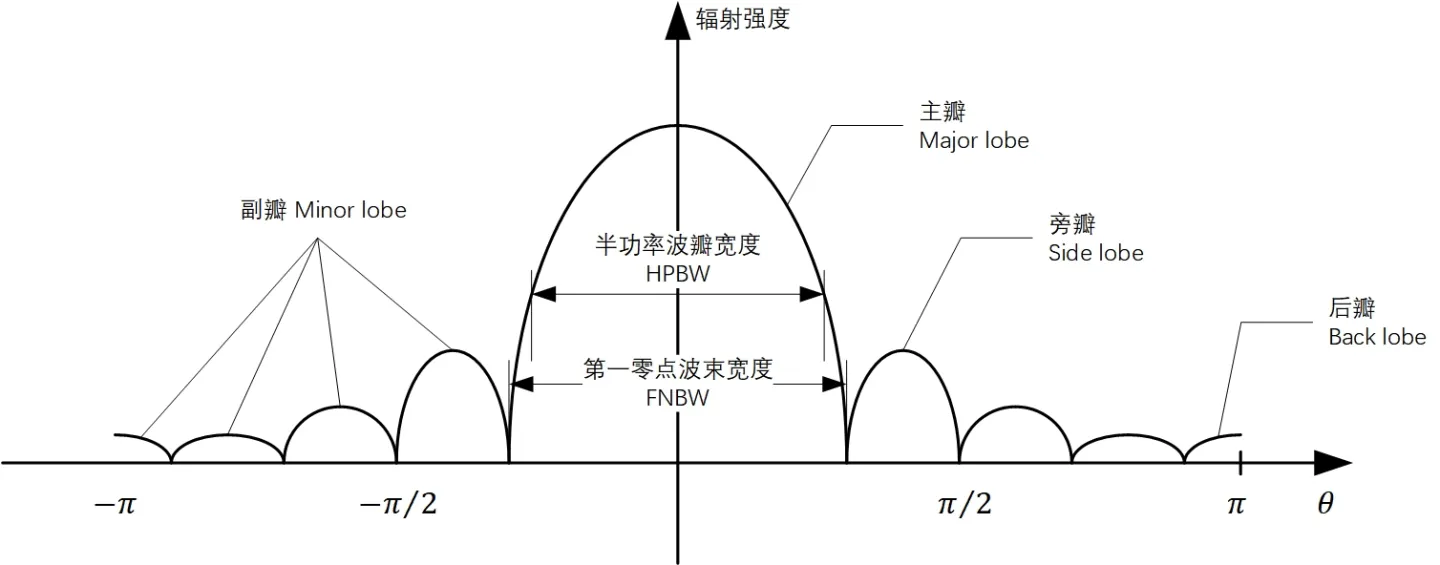
# 摘要
本文深入探讨了均匀线阵天线的基础理论及其方向图设计,旨在提升天线系统的性能和应用效能。文章首先介绍了均匀线阵及方向图的基本概念,并阐述了方向图设计的理论基础,包括波束形成与主瓣及副瓣特性的控制。随后,论文通过设计软件工具的应用和实际天线系统调试方法,展示了方向图设计的实践技巧。文中还包含了一系列案例分析,以实证研究验证理论,并探讨了均匀线阵性能
【兼容性问题】快解决:专家教你确保光盘在各设备流畅读取
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2021/L/w/I3DfXKTAmrqNi0rGtG5A/2014-06-24-cd-dvd-bluray.png)
# 摘要
光盘作为一种传统的数据存储介质,其兼容性问题长
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )