【位图的本质解密】:从二进制视角揭开位图的神秘面纱
发布时间: 2024-08-24 05:35:43 阅读量: 33 订阅数: 42 
# 1. 位图的理论基础
位图(Bitmap),也称光栅图像,是一种以像素阵列形式存储图像数据的数字图像格式。它将图像分解为一个个离散的像素点,每个像素点都具有特定的颜色值。位图因其简单易用、存储效率高而广泛应用于计算机图形学、图像处理和计算机视觉等领域。
位图的理论基础主要包括:
- **像素化:** 位图将图像划分为像素网格,每个像素点代表图像中一个特定位置的颜色信息。
- **颜色深度:** 每个像素点的颜色深度决定了它可以表示的颜色数量。常见颜色深度有 8 位(256 色)、16 位(65536 色)和 24 位(16777216 色)。
- **图像分辨率:** 位图的分辨率由像素网格的大小决定,单位为像素/英寸 (PPI)。更高的分辨率意味着图像更清晰,但文件体积也更大。
# 2. 位图的二进制解析
位图文件以二进制格式存储图像数据,了解其内部结构对于解析和处理位图图像至关重要。本章节将深入探讨位图文件的二进制解析,包括文件头、信息头和像素数据的存储方式。
### 2.1 位图文件结构分析
位图文件由文件头和信息头组成,其中文件头包含文件的基本信息,而信息头则描述图像的具体属性。
#### 2.1.1 文件头解析
文件头位于位图文件的开头,包含以下字段:
| 字段名 | 字节数 | 描述 |
|---|---|---|
| bfType | 2 | 文件类型标识符("BM") |
| bfSize | 4 | 文件大小(以字节为单位) |
| bfReserved1 | 2 | 保留字段,通常为 0 |
| bfReserved2 | 2 | 保留字段,通常为 0 |
| bfOffBits | 4 | 位图数据相对于文件开头的偏移量(以字节为单位) |
#### 2.1.2 信息头解析
信息头紧随文件头之后,包含以下字段:
| 字段名 | 字节数 | 描述 |
|---|---|---|
| biSize | 4 | 信息头大小(以字节为单位) |
| biWidth | 4 | 图像宽度(以像素为单位) |
| biHeight | 4 | 图像高度(以像素为单位) |
| biPlanes | 2 | 图像平面数(通常为 1) |
| biBitCount | 2 | 每个像素的位数(例如,24 位表示 RGB) |
| biCompression | 4 | 压缩类型(0 表示未压缩) |
| biSizeImage | 4 | 图像数据大小(以字节为单位) |
| biXPelsPerMeter | 4 | 水平分辨率(以每米像素数为单位) |
| biYPelsPerMeter | 4 | 垂直分辨率(以每米像素数为单位) |
| biClrUsed | 4 | 调色板中使用的颜色数(0 表示使用全部颜色) |
| biClrImportant | 4 | 调色板中重要的颜色数(0 表示全部颜色重要) |
### 2.2 位图像素数据的存储与处理
位图像素数据存储在文件头和信息头之后。像素数据以位图方式组织,其中每个像素由一组位表示。
#### 2.2.1 像素数据的格式和编码
像素数据的格式取决于 `biBitCount` 字段的值。常见的格式包括:
- **1 位:**每个像素由 1 位表示,可以是黑色或白色。
- **8 位:**每个像素由 8 位表示,可以表示 256 种灰度值。
- **24 位:**每个像素由 3 个 8 位值表示,分别代表红色、绿色和蓝色(RGB)。
- **32 位:**每个像素由 4 个 8 位值表示,其中前 3 个值表示 RGB,最后一个值表示透明度(Alpha)。
#### 2.2.2 像素数据的读写操作
读取和写入位图像素数据需要考虑以下因素:
- **字节顺序:**位图文件使用小端字节顺序,即最低有效位存储在最低地址。
- **像素对齐:**像素数据通常按 4 字节对齐,这意味着每行的像素数必须是 4 的倍数。
- **扫描顺序:**位图像素数据从左下角开始,按行从下到上扫描。
**代码示例:**
```python
# 读取 24 位 RGB 像素数据
with open("image.bmp", "rb") as f:
# 跳过文件头和信息头
f.seek(54)
# 读取像素数据
pixels = f.read()
# 写入 24 位 RGB 像素数据
with open("new_image.bmp", "wb") as f:
# 写入文件头和信息头
# ...
# 写入像素数据
f.write(pixels)
```
# 3.1 图像的缩放与裁剪
#### 3.1.1 缩放算法的原理和实现
图像缩放是一种将原始图像调整为不同尺寸的过程。常见的缩放算法包括:
- **最近邻插值:**直接复制原始图像中最近的像素值,简单快速,但会产生锯齿状边缘。
- **双线性插值:**对原始图像中的四个相邻像素进行加权平均,平滑边缘,但可能产生模糊效果。
- **双三次插值:**对原始图像中的 16 个相邻像素进行加权平均,产生更平滑和更准确的结果。
以下代码演示了使用双线性插值缩放图像:
```python
import cv2
# 读取原始图像
img = cv2.imread('image.jpg')
# 缩放图像,指定新的宽高
scaled_img = cv2.resize(img, (new_width, new_height), interpolation=cv2.INTER_LINEAR)
# 显示缩放后的图像
cv2.imshow('Scaled Image', scaled_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**参数说明:**
- `img`: 原始图像
- `new_width`: 缩放后的宽度
- `new_height`: 缩放后的高度
- `interpolation`: 插值算法,可选值有 `cv2.INTER_NEAREST`、`cv2.INTER_LINEAR` 和 `cv2.INTER_CUBIC`
**代码逻辑:**
1. 使用 `cv2.imread()` 读取原始图像。
2. 使用 `cv2.resize()` 缩放图像,指定新的宽高和插值算法。
3. 使用 `cv2.imshow()` 显示缩放后的图像。
4. 使用 `cv2.waitKey(0)` 等待用户按任意键关闭窗口。
5. 使用 `cv2.destroyAllWindows()` 销毁所有窗口。
#### 3.1.2 裁剪操作的实现
图像裁剪是从原始图像中提取特定区域的过程。以下代码演示了如何裁剪图像:
```python
import cv2
# 读取原始图像
img = cv2.imread('image.jpg')
# 裁剪图像,指定裁剪区域的左上角坐标和右下角坐标
cropped_img = img[y1:y2, x1:x2]
# 显示裁剪后的图像
cv2.imshow('Cropped Image', cropped_img)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**参数说明:**
- `img`: 原始图像
- `y1`: 裁剪区域左上角的纵坐标
- `x1`: 裁剪区域左上角的横坐标
- `y2`: 裁剪区域右下角的纵坐标
- `x2`: 裁剪区域右下角的横坐标
**代码逻辑:**
1. 使用 `cv2.imread()` 读取原始图像。
2. 使用 NumPy 切片操作 `img[y1:y2, x1:x2]` 裁剪图像。
3. 使用 `cv2.imshow()` 显示裁剪后的图像。
4. 使用 `cv2.waitKey(0)` 等待用户按任意键关闭窗口。
5. 使用 `cv2.destroyAllWindows()` 销毁所有窗口。
# 4. 位图的图像分析与识别
### 4.1 图像特征提取
图像特征提取是图像分析与识别的关键步骤,其目的是从图像中提取出能够代表图像内容和属性的特征。这些特征可以用于图像分类、检索、识别等任务。
#### 4.1.1 直方图分析
直方图是一种统计工具,用于表示图像中像素值分布的情况。对于灰度图像,直方图的横轴表示像素值,纵轴表示对应像素值出现的次数。通过分析直方图,可以得到图像的亮度分布、对比度和纹理等信息。
```python
import cv2
import matplotlib.pyplot as plt
# 读取图像
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 计算直方图
hist = cv2.calcHist([image], [0], None, [256], [0, 256])
# 绘制直方图
plt.plot(hist)
plt.xlabel('像素值')
plt.ylabel('出现次数')
plt.title('图像直方图')
plt.show()
```
#### 4.1.2 边缘检测
边缘检测是一种图像处理技术,用于检测图像中亮度或颜色变化剧烈的区域。边缘通常代表图像中的物体边界或纹理变化。常见的边缘检测算法包括 Sobel 算子、Canny 算子等。
```python
import cv2
# 读取图像
image = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# 应用 Sobel 算子进行边缘检测
edges = cv2.Sobel(image, cv2.CV_64F, 1, 0)
# 二值化边缘图像
edges = cv2.threshold(edges, 127, 255, cv2.THRESH_BINARY)[1]
# 显示边缘图像
cv2.imshow('边缘图像', edges)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
### 4.2 图像识别与分类
图像识别与分类是计算机视觉领域的重要任务,其目的是识别图像中的物体或场景,并将其归类到特定的类别中。
#### 4.2.1 机器学习算法的应用
机器学习算法在图像识别与分类中扮演着至关重要的角色。常见的算法包括支持向量机 (SVM)、决策树、神经网络等。这些算法通过训练大量标记的图像数据,学习图像特征与类别之间的关系,从而实现图像的识别和分类。
#### 4.2.2 图像识别模型的训练与评估
图像识别模型的训练和评估是图像分析与识别中的关键环节。训练过程涉及选择合适的机器学习算法、准备训练数据、调整模型参数等。评估过程则通过测试集来衡量模型的性能,包括准确率、召回率、F1 值等指标。
# 5. 位图的应用与发展趋势
位图作为一种基础图像格式,在图像处理和计算机视觉领域有着广泛的应用。随着技术的不断发展,位图也在不断演进,呈现出新的发展趋势。
### 5.1 位图在图像处理中的应用
#### 5.1.1 图像编辑与增强
位图在图像编辑软件中扮演着重要的角色。它支持各种图像编辑操作,如裁剪、缩放、旋转、色彩调整等。通过这些操作,用户可以对图像进行美化、优化和处理。
#### 5.1.2 医学影像处理
在医学影像领域,位图被广泛用于存储和处理医疗图像,如X光、CT和MRI扫描。这些图像通常具有较大的尺寸和复杂的结构,位图能够有效地保存和显示这些图像的细节。
### 5.2 位图在计算机视觉中的应用
#### 5.2.1 目标检测与识别
计算机视觉中的目标检测和识别任务依赖于位图图像。位图的像素数据提供了丰富的视觉信息,通过算法处理,可以提取图像中的目标特征,并进行识别和分类。
#### 5.2.2 图像分割与理解
图像分割是计算机视觉中一项重要的任务,它将图像分解为具有不同特征的区域。位图图像的像素数据为图像分割算法提供了基础,算法通过分析像素的特征和关系,将图像分割成有意义的区域。
### 5.3 位图的发展趋势
随着计算机技术和图像处理需求的不断提升,位图也在不断发展和演进。一些新的趋势包括:
- **高动态范围(HDR)位图:**HDR位图支持更宽的色域和亮度范围,可以呈现更逼真的图像。
- **多光谱位图:**多光谱位图包含多个波段的信息,可以用于分析不同波长的光谱数据。
- **深度位图:**深度位图除了颜色信息外,还包含深度信息,可以用于创建3D图像和进行3D重建。
- **人工智能(AI)驱动的位图处理:**AI技术正在被应用于位图处理中,通过深度学习算法,可以实现图像的自动编辑、增强和分析。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介:**
本专栏全面深入地探讨了位图的原理和应用实战。从二进制视角揭开位图的神秘面纱,深入剖析其特性和应用场景。专栏重点介绍了位图在数据分析、图像处理、数据库优化、社交网络、布隆过滤器、倒排索引、机器学习、并行化、分布式存储、流式处理、物联网、人工智能和云计算中的妙用。通过揭秘位图加速查询的秘密武器、高效实现图像压缩与处理、释放多核优势提升处理速度等实际应用,帮助读者全面理解位图的原理和价值。此外,专栏还提供了位图压缩技术详解、索引优化策略和并行处理技巧,助力读者优化存储空间、提升性能和解锁数据价值。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Catia曲线曲率分析深度解析:专家级技巧揭秘(实用型、权威性、急迫性)
# 摘要
本文全面介绍了Catia软件中曲线曲率分析的理论、工具、实践技巧以及高级应用。首先概述了曲线曲率的基本概念和数学基础,随后详细探讨了曲线曲率的物理意义及其在机械设计中的应用。文章第三章和第四章分别介绍了Catia中曲线曲率分析的实践技巧和高级技巧,包括曲线建模优化、问题解决、自动化定制化分析方法。第五章进一步探讨了曲率分析与动态仿真、工业设计中的扩展应用,以及曲率分析技术的未来趋势。最后,第六章对Catia曲线曲率分析进行了
【MySQL日常维护】:运维专家分享的数据库高效维护策略
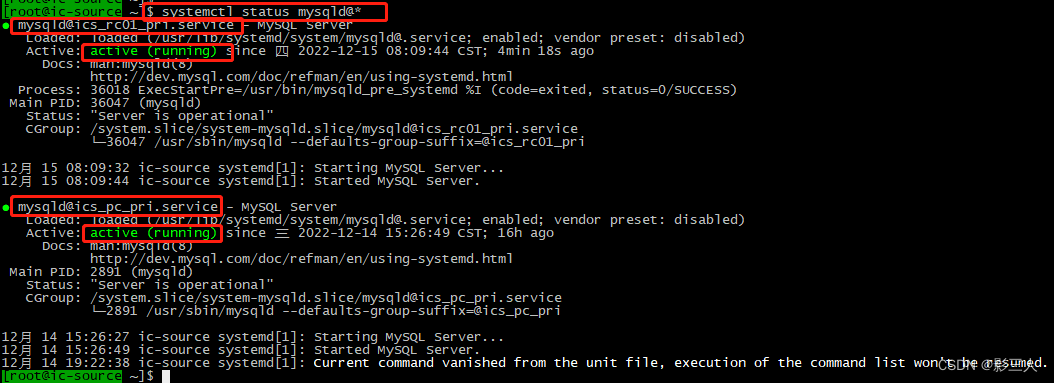
# 摘要
本文全面介绍了MySQL数据库的维护、性能监控与优化、数据备份与恢复、安全性和权限管理以及故障诊断与应对策略。首先概述了MySQL基础和维护的重要性,接着深入探讨了性能监控的关键性能指标,索引优化实践,SQL语句调优技术。文章还详细讨论了数据备份的不同策略和方法,高级备份工具及技巧。在安全性方面,重点分析了用户认证和授权机制、安全审计以及防御常见数据库攻击的策略。针对故障诊断,本文提供了常
EMC VNX5100控制器SP硬件兼容性检查:专家的完整指南

# 摘要
本文旨在深入解析EMC VNX5100控制器的硬件兼容性问题。首先,介绍了EMC VNX5100控制器的基础知识,然后着重强调了硬件兼容性的重要性及其理论基础,包括对系统稳定性的影响及兼容性检查的必要性。文中进一步分析了控制器的硬件组件,探讨了存储介质及网络组件的兼容性评估。接着,详细说明了SP硬件兼容性检查的流程,包括准备工作、实施步骤和问题解决策略。此外
【IT专业深度】:西数硬盘检测修复工具的专业解读与应用(IT专家的深度剖析)
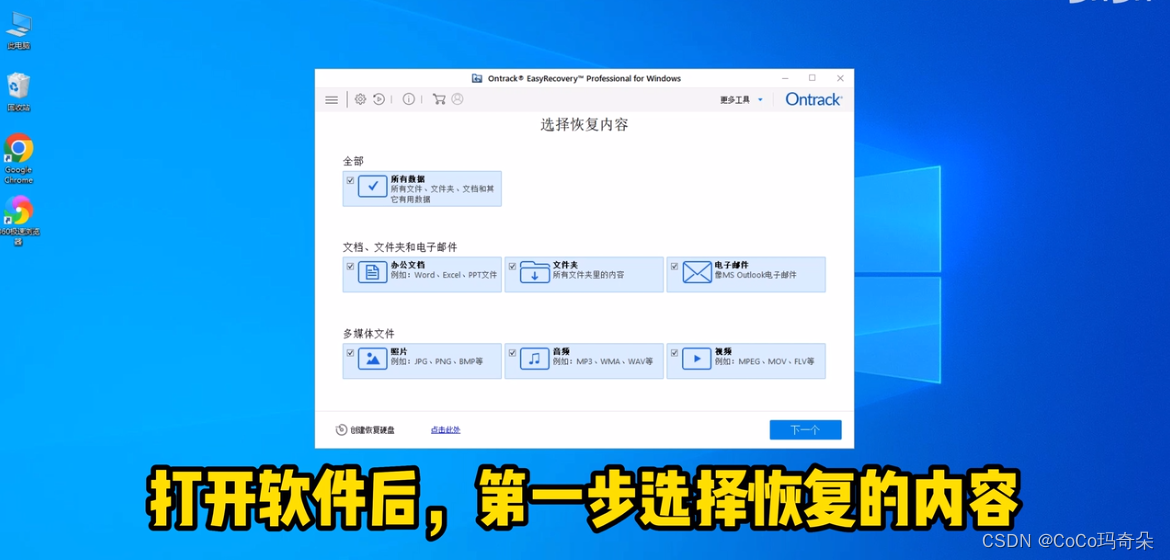
# 摘要
本文旨在全面介绍硬盘的基础知识、故障检测和修复技术,特别是针对西部数据(西数)品牌的硬盘产品。第一章对硬盘的基本概念和故障现象进行了概述,为后续章节提供了理论基础。第二章深入探讨了西数硬盘检测工具的理论基础,包括硬盘的工作原理、检测软件的分类与功能,以及故障检测的理论依据。第三章则着重于西数硬盘修复工具的使用技巧,包括修复前的准备工作、实际操作步骤和常见问题的解决方法。第四章与第五章进一步探讨了检测修复工具的深入应
【永磁电机热效应探究】:磁链计算如何影响电机温度管理
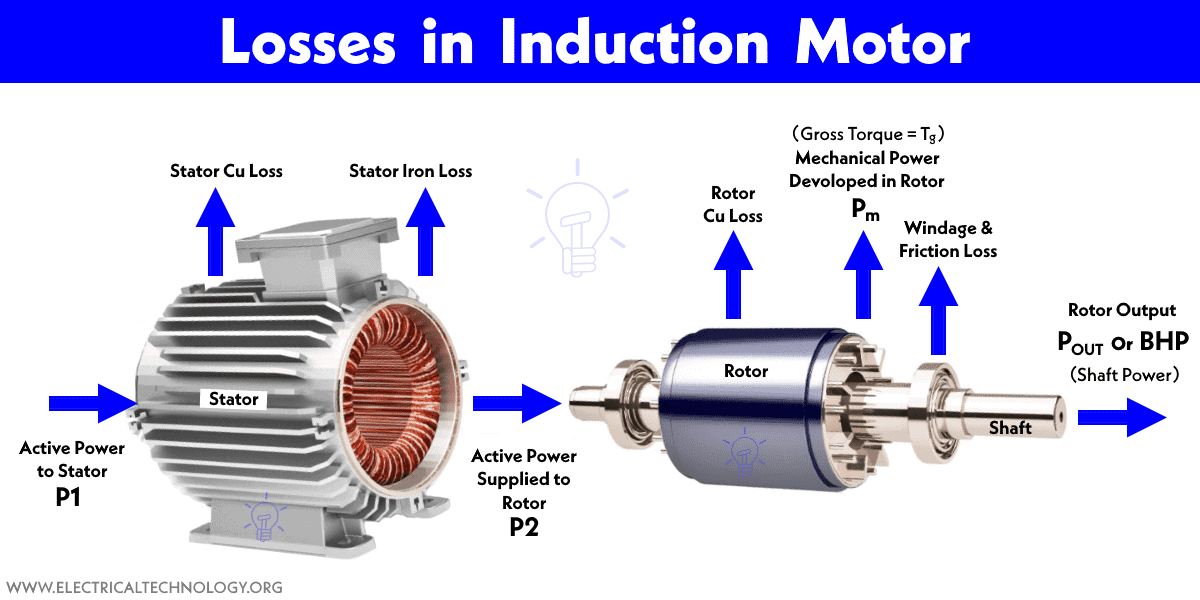
# 摘要
本论文对永磁电机的基础知识及其热效应进行了系统的概述。首先,介绍了永磁电机的基本理论和热效应的产生机制。接着,详细探讨了磁链计算的理论基础和计算方法,以及磁链对电机温度的影响。通过仿真模拟与分析,评估了磁链计算在电机热效应分析中的应用,并对仿真结果进行了验证。进一步地,本文讨论了电机温度管理的实际应用,包括热效应监测技术和磁链控制策略的
【代码重构在软件管理中的应用】:详细设计的革新方法

# 摘要
代码重构是软件维护和升级中的关键环节,它关注如何提升代码质量而不改变外部行为。本文综合探讨了代码重构的基础理论、深
【SketchUp设计自动化】

# 摘要
本文系统地探讨了SketchUp设计自动化在现代设计行业中的概念与重要性,着重介绍了SketchUp的基础操作、脚本语言特性及其在自动化任务中的应用。通过详细阐述如何通过脚本实现基础及复杂设计任务的自动化
【CentOS 7时间同步终极指南】:掌握NTP配置,提升系统准确性
# 摘要
本文深入探讨了CentOS 7系统中时间同步的必要性、NTP(Network Time Protocol)的基础知识、配置和高级优化技术。首先阐述了时
轮胎充气仿真深度解析:ABAQUS模型构建与结果解读(案例实战)

# 摘要
轮胎充气仿真是一项重要的工程应用,它通过理论基础和仿真软件的应用,能够有效地预测轮胎在充气过程中的性能和潜在问题。本文首先介绍了轮胎充气仿真的理论基础和应用,然后详细探讨了ABAQUS仿真软件的环境配置、工作环境以及前处理工具的应用。接下来,本文构建了轮胎充气模型,并设置了相应的仿真参数。第四章分析了仿真的结果,并通过后处理技术和数值评估方法进行了深入解读。最后,通过案例实战演练,本文演示了
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )