Snake算法的变种与改进:探索路径规划新天地
发布时间: 2024-07-09 10:59:08 阅读量: 72 订阅数: 31 

snake-neural-network:神经网络和遗传算法的实验
# 1. Snake算法基础**
Snake算法是一种经典的路径规划算法,它模拟了蛇的运动方式,通过贪婪地探索周围环境来寻找最优路径。该算法易于理解和实现,具有较好的效率和鲁棒性。
**1.1 算法原理**
Snake算法的工作原理是:从起点开始,蛇头向周围八个方向探索,选择一个最优方向前进,并把经过的路径加入到蛇身中。当蛇头到达终点或无法继续前进时,算法结束。
**1.2 算法实现**
Snake算法可以用代码实现,核心代码如下:
```python
def snake_algorithm(start, end, maze):
"""
Snake算法实现
Args:
start: 起点坐标
end: 终点坐标
maze: 迷宫地图
Returns:
最优路径
"""
# 初始化蛇头和蛇身
head = start
body = [start]
# 循环探索
while head != end:
# 获取蛇头周围可行方向
directions = get_valid_directions(head, maze)
# 选择最优方向
next_direction = choose_best_direction(directions, end)
# 更新蛇头和蛇身
head = move_head(head, next_direction)
body.append(head)
# 返回最优路径
return body
```
# 2. Snake算法变种
### 2.1 贪婪Snake算法
#### 2.1.1 算法原理
贪婪Snake算法是一种简化的Snake算法,它在每个决策点上选择当前可用的最佳动作,而不考虑未来可能的后果。这种算法简单易于实现,但它可能导致次优解,因为没有考虑全局信息。
#### 2.1.2 算法实现
```python
def greedy_snake(grid, start, goal):
"""
贪婪Snake算法实现
参数:
grid: 二维网格,表示环境
start: 起始位置
goal: 目标位置
返回:
从起始位置到目标位置的路径
"""
# 初始化路径
path = [start]
# 循环,直到到达目标位置
while path[-1] != goal:
# 获取当前位置的邻居
neighbors = get_neighbors(grid, path[-1])
# 从邻居中选择贪婪动作
greedy_action = max(neighbors, key=lambda neighbor: heuristic(neighbor, goal))
# 更新路径
path.append(greedy_action)
return path
```
**代码逻辑分析:**
* `get_neighbors()` 函数获取当前位置的邻居。
* `heuristic()` 函数计算当前位置到目标位置的启发式值。
* 贪婪动作是邻居中启发式值最大的邻居。
* 算法不断更新路径,直到到达目标位置。
### 2.2 A* Snake算法
#### 2.2.1 算法原理
A* Snake算法是一种启发式搜索算法,它在贪婪Snake算法的基础上增加了启发式函数,以引导搜索过程。启发式函数估计从当前位置到目标位置的距离,帮助算法做出更明智的决策。
#### 2.2.2 算法实现
```python
def a_star_snake(grid, start, goal):
"""
A* Snake算法实现
参数:
grid: 二维网格,表示环境
start: 起始位置
goal: 目标位置
返回:
从起始位置到目标位置的路径
"""
# 初始化优先级队列
pq = PriorityQueue()
pq.put(start, 0)
# 初始化路径字典
paths = {start: []}
# 循环,直到优先级队列为空
while not pq.empty():
# 获取优先级最高的元素
current, cost = pq.get()
# 如果当前元素是目标位置,则返回路径
if current == goal:
return paths[current]
# 获取当前元素的邻居
neighbors = get_neighbors(grid, current)
# 对于每个邻居
for neighbor in neighbors:
# 计算邻居的路径成本
path_cost = cost + 1
# 如果邻居不在路径字典中,或者路径成本更低
if neighbor not in paths or path_cost < paths[neighbor]:
# 更新路径字典
paths[neighbor] = paths[current] + [neighbor]
# 计算邻居的启发式值
heuristic_value = heuristic(neighbor, goal)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《Snake算法:从小白到高手,解锁路径规划新境界》专栏深入剖析了Snake算法的原理、实现和应用。它涵盖了广泛的领域,包括路径规划、图像处理、计算机视觉、机器人导航、自动驾驶、医疗影像处理、工业自动化、生物信息学、自然语言处理、推荐系统、社交网络分析、游戏开发和人工智能。专栏提供了全面的指南,从初学者到高级用户,帮助读者掌握Snake算法的强大功能。它还提供了性能分析、优化技巧和与其他路径规划算法的比较,使读者能够根据具体需求选择最合适的算法。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【非线性材料的秘密】:10个案例揭示分析精度提升策略
# 摘要
非线性材料的研究是现代材料科学领域的重要课题,它关系到光通信、压电应用和光学晶体等关键技术的发展。本文首先介绍了非线性材料的基础知识,探讨了其物理机制、非线性系数测量以及理论模型的发展。随后,文章转向实验技术与精度分析,讨论了实验测量技术的挑战、数据处理方法以及精度验证。通过案例研究,本文深入分析了不同领域中非线性材料分析精度提升的策略与效果。最后,文章展望了非线性材料分析的技术前沿和未来发展趋势,并讨论了实现进一步精度提升
【PCIe Gen3升级宝典】:Xilinx 7系列向PCIe Gen3迁移实用指南

# 摘要
PCIe技术作为高带宽计算机总线标准,在数据传输领域占据重要地位。随着应用需求的增长,PCIe Gen3标准的推
GT-power仿真秘籍:构建复杂模型的5个关键步骤
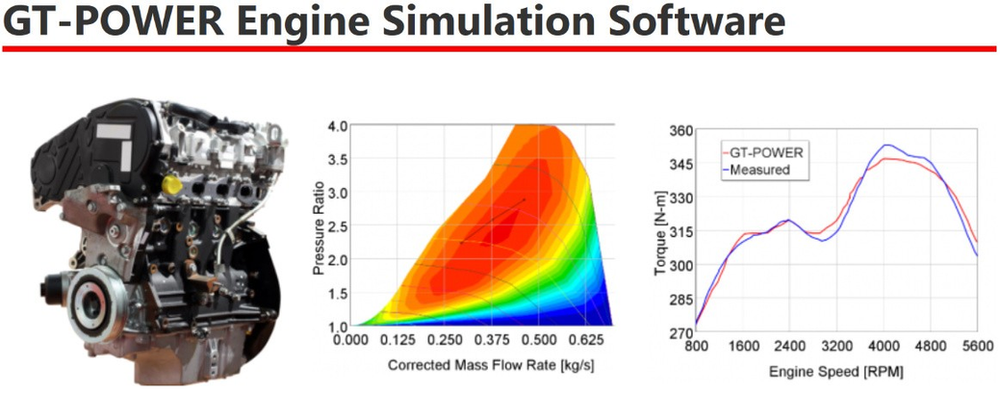
# 摘要
GT-power仿真技术作为一种高效的动力系统分析工具,在内燃机和其他动力设备的性能评估和设计优化中发挥着重要作用。本文首先概述了GT-power仿真的基本概念和应用范围,然后详细介绍了构建GT-power模型的理论基础,包括对软件工作原理的理解、模型构建的理论框架、关键参数的设置
【MySQL索引优化大师】:揭秘高效检索与最佳索引选择技巧
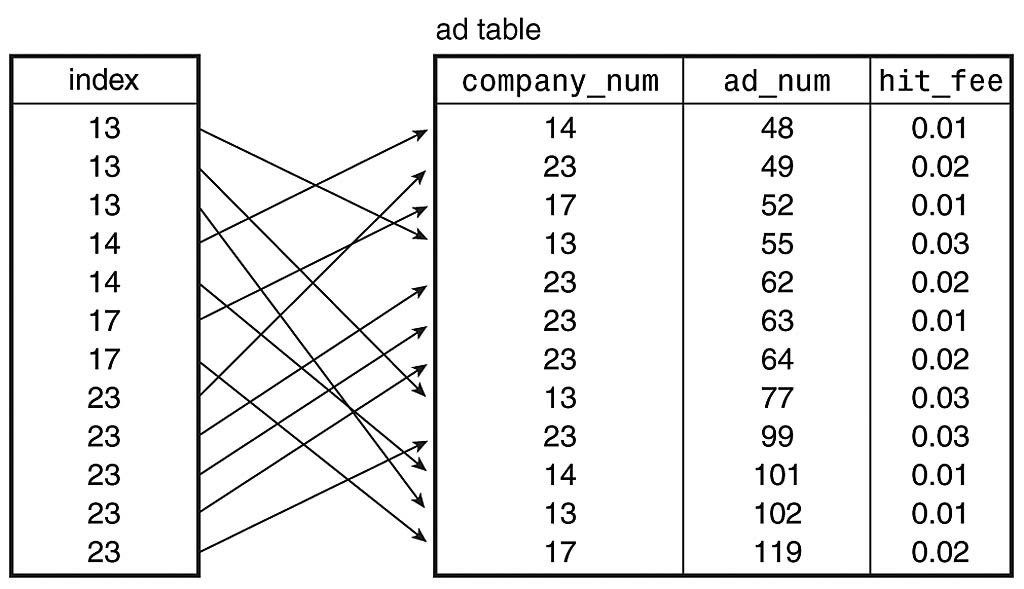
# 摘要
本文系统地探讨了MySQL数据库中索引的基础知识、类型、优化实践技巧以及选择策略,并展望了未来索引技术的发展趋势。首先介绍了索引的作用和基础概念,接着详述了不同索引类型如B-Tree、Hash、全文索引以及稀疏和密集索引,并分析了它们的工作原理及适用场景。随后,本文深入讨论了索引的创建、管理、监控以及诊断工具,结合实际案例分析了索引
【软件兼容性升级指南】:PCIe 5.0驱动程序影响及应对策略解析
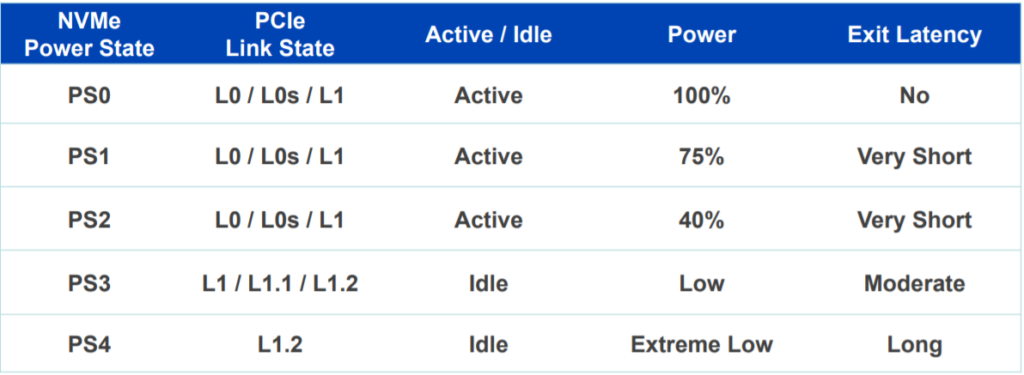
# 摘要
随着PCIe技术的持续发展,PCIe 5.0已经成为高速数据传输的新标准,对驱动程序的兼容性升级提出了新的要求。本文首先概述了PCIe 5.0技术及其驱动程序基础,强调了软件兼容性升级的重要性,并详细分析了在升级过程中所面临的挑战和影响。通过系统评估、测试与模拟,以及实际案例研究,本文深入讨论了兼容性升级的具体实施步骤,包括检查、安装、验证、优化、监控和维护。研究结果表明,经过周密的准备和测试,可以有效地实现PCIe 5.0驱动程序的
【Vue组件性能优化】:实现大型表格数据的高效渲染
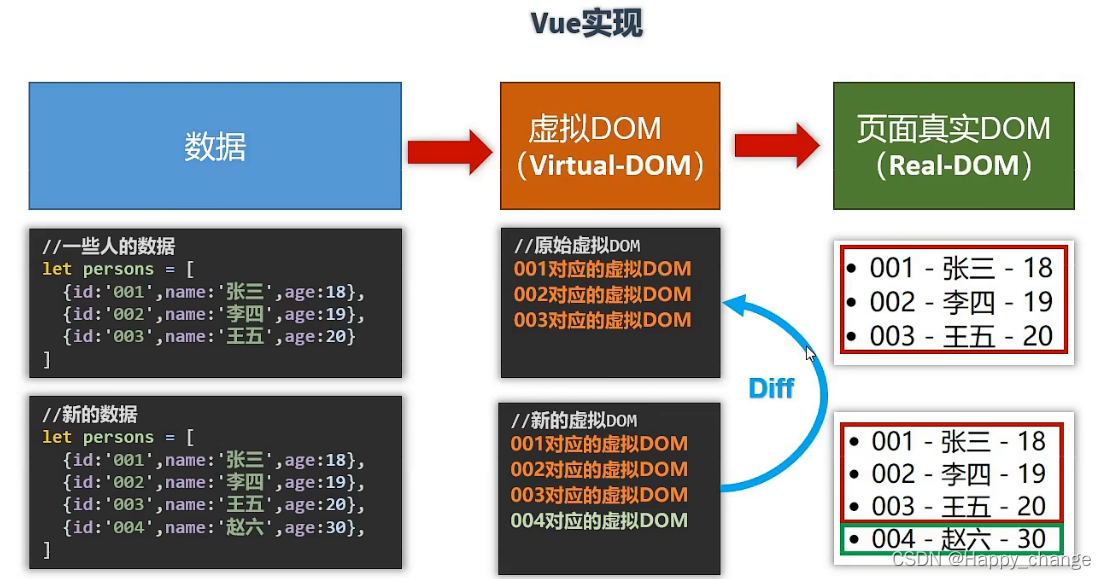
# 摘要
随着Web应用的日益复杂,Vue组件性能优化成为提升用户体验的关键。本文首先概述了Vue组件性能优化的重要性,然后深入探讨了性能优化的理论基础,包
【模拟与数字电路的混合设计】:探索16位加法器的新境界
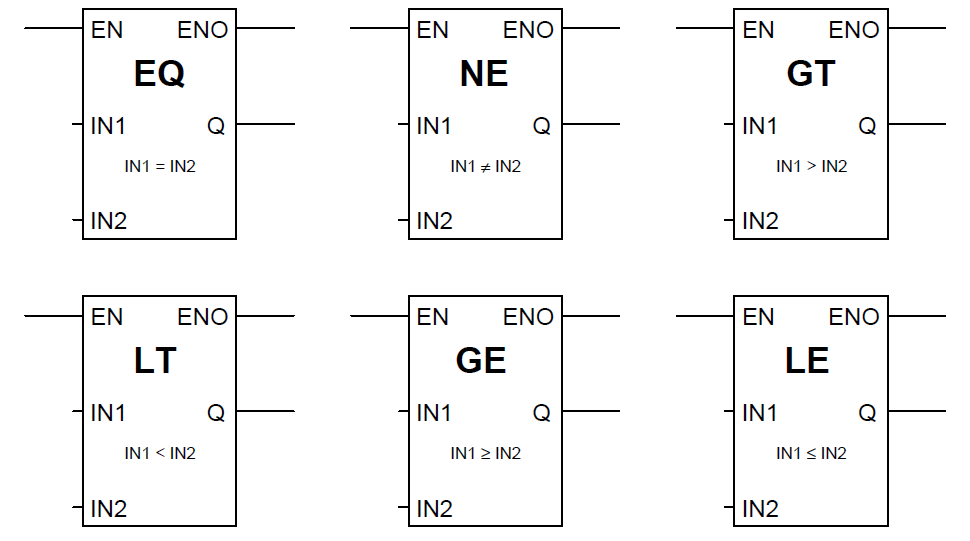
# 摘要
本文综合分析了数字电路与模拟电路融合的先进技术,重点研究了16位加法器的设计基础、电路实现与优化、混合信号环境下的应用、以及与微控制器的编程接口。通过对16位加法器的硬件设计原理和电路模拟仿真的探讨,本文详细阐述了加法器在不同领域的应用案例,并针对微控制器的交互提出了具体的编程策
Android UBOOT教程:如何优化开机logo动画效果,提升启动视觉冲击力

# 摘要
本文详细探讨了UBOOT在Android系统启动过程中的关键作用,以及如何通过优化开机logo动画来提升用户体验。首先,分析了UBOOT的初始化过程与Android启动序列的关系。随后,介绍了开机动画的类型、格式及其与用户交互的方式。实践部分详细阐述了开机动画素材的准备、设计、编码实现以及性能优化策略。进一步,本文探讨了通过自定义UB
内存映射I_O揭秘:微机接口技术深度解析

# 摘要
内存映射I/O是一种高效的数据传输技术,通过将设备寄存器映射到处理器的地址空间,实现快速的数据交换。本文首先介绍了内存映射I/O的基本概念和原理,然后详细探讨了其技术实现,包括硬件结构、软件模型以及编程接口。通过分析内存映射I/O在设备驱动开发、性能优化以及现代计算架构中的应用案例,本文阐述了其在提升系统性能和简化编程复杂性方面的优势。最后,针对内存映射I/O面临的安全挑战和技术发展趋势进
CMW100 WLAN故障快速诊断手册:立即解决网络难题
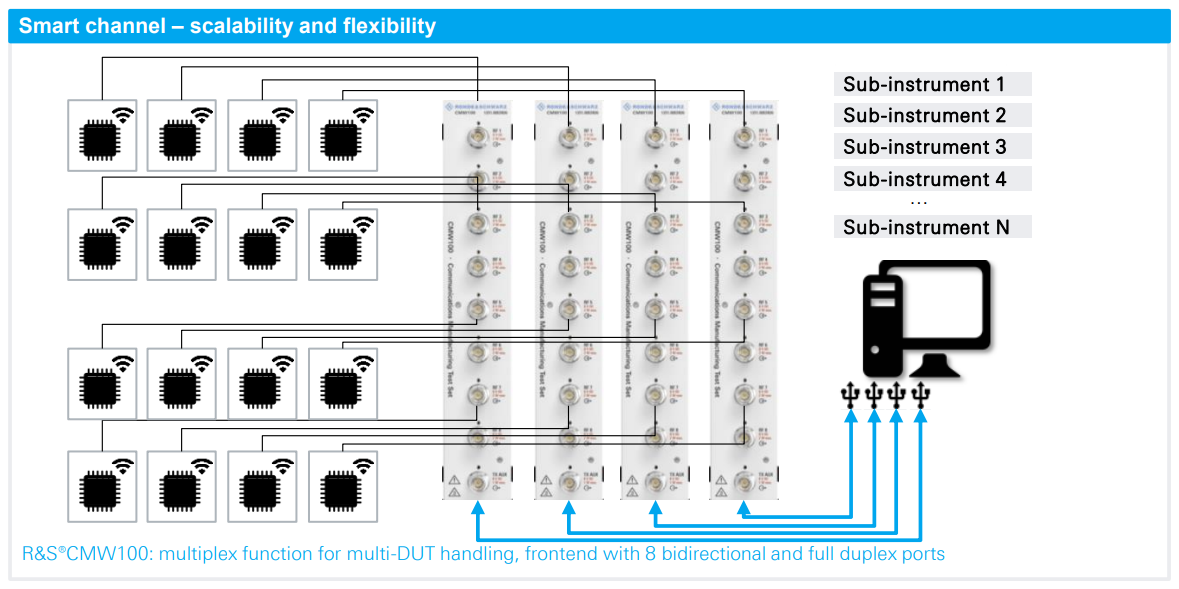
# 摘要
随着无线局域网(WLAN)技术的广泛应用,网络故障诊断成为确保网络稳定性和性能的关键环节。本文深入探讨了WLAN故障诊断的基础知识,网络故障的理论,以及使用CMW100这一先进的诊断工具进行故障排除的具体案例。通过理解不同类型的WLAN故障,如信号强度问题、接入限制和网络配置错误,并应用故障诊断的基本原则和工具,本文提供了对网络故障分析和解决过程的全面视角。文章详细介绍了CMW100的功能、特点及在实战中如何应对无线信号覆盖问题、客户端接入问题和网络安全漏
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )