智能交通系统中的应用:郭天祥TX-1C单片机实验板的潜力
发布时间: 2024-12-14 22:24:29 阅读量: 2 订阅数: 5 
参考资源链接:[TX-1C单片机实验板使用手册V3.0详解](https://wenku.csdn.net/doc/64a8c019b9988108f2014176?spm=1055.2635.3001.10343)
# 1. 智能交通系统的概述与需求
在今日繁忙都市,随着车辆数量的急剧增加,交通堵塞已成为城市发展的瓶颈。智能交通系统(Intelligent Transportation System, ITS)应运而生,旨在利用现代信息技术、数据通信传输技术、电子传感技术、控制技术和计算机技术等多种先进技术,优化交通流的管理和控制,提高道路使用效率,保障交通安全,减少环境污染,提升用户体验。
## 智能交通系统的需求分析
智能交通系统的需求可从多个维度进行分析,包括但不限于:
- **实时性需求**:系统需要快速响应交通状况的变化,如实时交通流量检测与分析,即时调整信号灯的时长等。
- **可靠性需求**:交通信号控制系统在任何情况下都需要保持稳定运行,避免因系统故障导致的交通混乱。
- **扩展性需求**:随着城市发展,系统需要方便地扩展新的功能或服务,满足日益增长的交通管理需求。
这些需求构成了智能交通系统设计与实施的基础,也是本系列文章探讨的重点。我们将在后续章节中逐步深入探讨郭天祥TX-1C单片机实验板在满足这些需求方面的作用与贡献。
# 2. 郭天祥TX-1C单片机实验板简介
### 2.1 单片机实验板的概念与重要性
在现代电子设计与教育中,单片机实验板扮演着至关重要的角色。单片机实验板,也被称为开发板,是电子工程师进行项目开发、测试和学习的重要工具。它通常包含了单片机核心处理器、基本的输入输出模块、电源管理、编程接口等关键组件,从而为工程师提供了一个快速开发和原型设计的平台。
郭天祥TX-1C单片机实验板正是在这样的背景下应运而生,它采用了高性能的微控制器,通过简单的连接和编程,就能让使用者快速上手并实现多样化的功能。这些实验板的出现不仅降低了学习门槛,还极大地加速了产品的研发周期,这对于从事IT和电子工程行业的人士来说,是一个不可多得的资源。
### 2.2 郭天祥TX-1C单片机实验板的主要特点
郭天祥TX-1C单片机实验板的主要特点可以从以下几个方面进行概述:
#### 2.2.1 核心处理器
核心处理器是单片机实验板的心脏,郭天祥TX-1C采用的处理器具备高运算性能和低功耗特性,能够高效地处理各种复杂的任务。处理器的选择对实验板的性能有着直接影响,因此,郭天祥在这一部分的选择上显然下足了功夫。
#### 2.2.2 扩展接口
扩展接口使得单片机实验板的功能可以得到灵活扩展。郭天祥TX-1C提供了丰富的接口,如UART、I2C、SPI、GPIO等,这些接口大大增强了单片机实验板的适用性,使其能应用于多种场景。
#### 2.2.3 用户接口
良好的用户接口设计是单片机实验板易于操作和推广的关键。郭天祥TX-1C在这方面也做得相当不错。它提供了标准的USB编程接口,LED指示灯,按钮等基本功能模块,这对于初学者来说非常友好。
### 2.3 郭天祥TX-1C单片机实验板的软件支持
软件开发是实现单片机应用价值的关键一步。郭天祥TX-1C单片机实验板不仅硬件性能出色,软件支持也同样强悍。它支持多种编程语言,包括C/C++,也兼容多种开发环境,如Keil、IAR等,这对于有不同开发需求的用户来说,提供了极大的灵活性。
### 2.4 使用郭天祥TX-1C单片机实验板的场景
郭天祥TX-1C单片机实验板可以应用于多种场景,从教学实验、工业控制到智能穿戴设备等。特别是对于智能交通系统的开发,郭天祥TX-1C单片机实验板能够提供稳定可靠的硬件支持。
#### 2.4.1 教学与研究
在教学与研究领域,郭天祥TX-1C单片机实验板是理想的实验工具。它能帮助学生和研究人员轻松实现各种控制算法,快速验证理论。
#### 2.4.2 商业开发
对于需要快速原型制作的商业开发者而言,郭天祥TX-1C单片机实验板的快速开发特性能显著缩短产品从设计到市场的周期。
## 第三章:理论基础与智能交通系统的技术原理
### 3.1 智能交通系统的基础理论
智能交通系统(ITS)利用先进的信息技术、数据通信传输技术、电子传感技术、控制技术及计算机技术等,对交通系统进行综合管理与控制,以解决交通拥堵、提高道路安全及效率。
#### 3.1.1 交通信号控制理论
交通信号控制是智能交通系统的核心技术之一,通过合理的信号控制,能够有效优化交通流,减少交通拥堵。例如,自适应信号控制系统能够根据实时交通状况调整信号灯,从而减少车辆等待时间,提高道路通行能力。
```mermaid
graph LR
A[车辆检测器] -->|实时数据| B(信号控制中心)
B -->|信号调整指令| C[信号灯]
C -->|执行| D[车辆流]
```
在上述流程图中,可以看出信号控制理论在智能交通系统中的应用模型。车辆检测器收集交通流数据,数据传输至信号控制中心,中心根据算法分析数据,并指令信号灯进行相应调整,从而实现对交通流的优化。
#### 3.1.2 路网流量分析
路网流量分析是智能交通系统中不可或缺的一部分。通过收集和分析路网中各路段的交通流数据,可以对路网进行优化设计,提高整体通行能力。
```markdown
| 路段 | 流量(辆/小时) | 占用率 | 平均速度(公里/小时) |
|------|----------------|--------|----------------------|
| A | 2000 | 60% | 30 |
| B | 1500 | 50% | 40 |
```
如上表所示,通过流量数据的记录与分析,我们可以得知各路段的交通状况,从而为交通信号控制、路网规划提供科学依据。
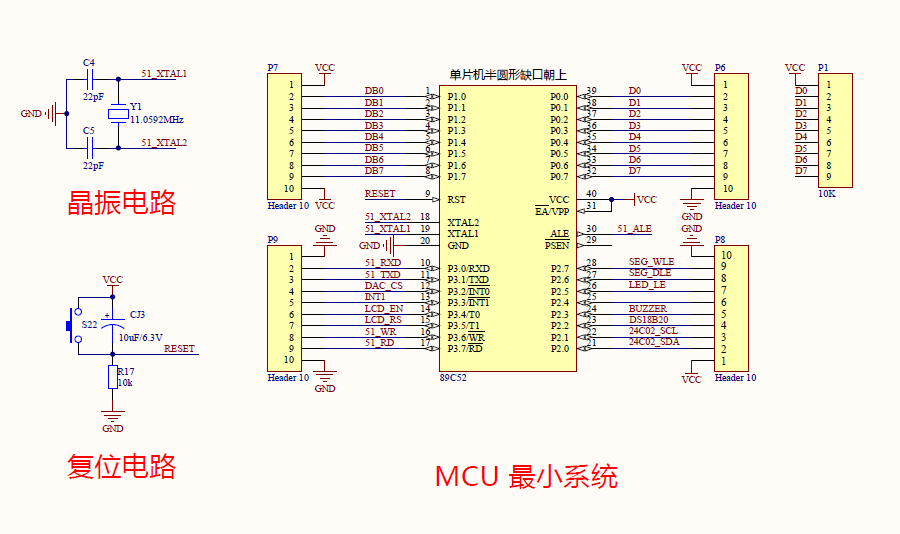
### 3.2 郭天祥TX-1C单片机实验板的硬件架构
#### 3.2.1 核心处理器与外设接口
郭天祥TX-1C单片机实验板的核心处理器采用先进的微控制器单元(MCU),具有强大的处理能力,足以支持各种复杂算法的运行。同时,外设接口丰富,可以连接多种传感器和执行器。
```mermaid
graph LR
A[核心处理器] -->|控制信号| B[外设接口]
B -->|数据通信| C[传感器/执行器]
C -->|环境信息| A
```
在这个架构中,核心处理器对传感器传回的环境信息进行处理,并根据处理结果控制外设接口,实现对外部设备的精确管理。
#### 3.2.2 输入输出模块的功能与设计
输入输出模块是郭天祥TX-1C单片机实验板与外界交互的重要桥梁。它包括了用于获取信号的输入模块,和用于控制外部设备的输出模块。模块设计时要考虑到信号的稳定性和实时性,同时也要考虑到电磁兼容性等因素。
```markdown
| 输入模块类型 | 功能描述 | 适用传感器 |
|--------------|----------|------------|
| 数字输入 | 接收开关信号 | 按钮、限位开关 |
| 模拟输入 | 采集连续信号 | 温度传感器、压力传感器 |
| 通讯接口 | 数据通信 | UART、I2C、SPI |
```
### 3.3 郭天祥TX-1C单片机实验板的软件环境
#### 3.3.1 编程语言与开发工具
郭天祥TX-1C单片机实验板支持包括C/C++在内的多种编程语言。为了便于开发和调试,还配套了集成开发环境(IDE),其中集成了编译器、调试器和烧录工具等。
```mermaid
graph LR
A[开发者] -->|编码| B(IDE)
B -->|编译| C[编译器]
C -->|代码生成| D[机器代码]
D -->|调试| E[调试器]
E -->|烧录| F[烧录工具]
```
通过这个流程,开发者能够把编写好的代码最终生成可在单片机上运行的机器代码,并进行有效的调试和烧录操作。
#### 3.3.2 操作系统支持与实时性能分析
郭天祥TX-1C单片机实验板具备了对实时操作系统的支持,这对于实现复杂、高要求的智能交通系统至关重要。同时,实时性能分析工具可以帮助开发者发现和优化程序中的瓶颈,保证系统运行的稳定性。
```markdown
| 操作系统选项 | 优势分析 | 使用场景 |
|--------------|----------|----------|
| FreeRTOS | 轻量级、实时性强 | 实时控制任务 |
| uC/OS-II | 系统稳定、扩展性强 | 复杂任务管理 |
```
以上内容详细介绍了郭天祥TX-1C单片机实验板的软硬件特性,并且探讨了它在智能交通系统中的应用基础。通过本章节的介绍,我们为读者提供了一个对郭天祥TX-1C单片机实验板全面了解的窗口,为深入探讨其在智能交通系统中的应用奠定了基础。
# 3. 理论基础与智能交通系统的技术原理
## 3.1 智能交通系统的基础理论
智能交通系统(Intelligent Transportation System, ITS)是利用先进的信息处理、通信、控制、电子传感、数据管理和计算机技术等,对传统交通管理系统进行智能化改造,以提高交通效率,保障交通安全性,减少环境污染和提高能源利用效率的一种系统。
### 3.1.1 交通信号控制理论
交通信号控制是智能交通系统中的核心问题之一,它直接影响到交通流量的分配以及道路使用效率。传统信号控制以固定时长为特

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
郭天祥 TX-1C 单片机实验板使用手册 V3.0 专栏为单片机爱好者和专业人士提供全面的指导。从基础教程到高级指南,该专栏涵盖了 TX-1C 实验板的各个方面,包括硬件架构、编程技巧、故障诊断、电源管理、存储解决方案、接口技术、开发板对比和实际应用。无论您是初学者还是经验丰富的用户,该专栏都能为您提供宝贵的知识和见解,帮助您最大限度地利用 TX-1C 实验板,在物联网、教育、智能制造、数据通信、智能交通、医疗设备和云服务等领域开发创新项目。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
西门子Insight软件:新手必读的7大操作要点与界面解读
参考资源链接:[西门子Insight软件用户账户管理操作手册](https://wenku.csdn.net/doc/6412b78abe7fbd1778d4aa90?spm=1055.2635.3001.10343)
# 1. 西门子Insight软件概述
## 1.1 软件简介
西门子Insight软件是一款面向工业设备和生产线的先进监控与数据分析解决方案。它将实时数据可视化和
【BODAS通信协议详解】:3大关键点,精通控制器与外部设备交互

参考资源链接:[BODAS控制器编程指南:从安装到下载的详细步骤](https://wenku.csdn.net/doc/6ygi1w6m14?spm=1055.2635.3001.10343)
# 1. BODAS通信协议概述
BODAS通信协议,作为工业自动化领域内的一项重要技术标准,确保了不同设备之间的高效、准确通信。在深入探究其内部工作机制之前,我们需要对其基本概念有所了解。本章主要介绍了BODAS协议
【CAD软件兼容性宝典】:确保许可管理器与OS完美结合

参考资源链接:[CAD提示“许可管理器不起作用或未正确安装。现在将关闭AutoCAD”的解决办法.pdf](https://wenku.csdn.net/doc/644b8a65ea0840391e559a08?spm=1055.2635.3001.10343)
# 1. CAD软件兼容性的重要性
CAD(计算机辅助
【Innovus命令行快速指南】:掌握这些技巧,让你从新手变大师
参考资源链接:[Innovus P&R 操作指南与流程详解](https://wenku.csdn.net/doc/6412b744be7fbd1778d49af2?spm=1055.2635.3001.10343)
# 1. Innovus命令行基础介绍
Innovus是Cadence公司推出的一款用于芯片设计的集成电路设计软件,其强大的命令行工具支持从设计、仿真到验证
深度剖析:巡检管理系统单机版A1.0的八大核心功能

参考资源链接:[巡检管理系统单机版A1.0+安装与使用指南](https://wenku.csdn.net/doc/6471c33c543f844488eb0879?spm=1055.2635.3001.10343)
# 1. 巡检管理系统单机版A1.0概览
巡检管理系统单机版A1.0是一个创新的IT解决方案,旨在实现资产的自动化管理,简化巡检流程,提升维护工作的效率和质量。本章节将提供一个整体性的概览,包括系统的基本功能、
STC89C52指令集精讲:助你迅速成为编程高手的50条指令详解
参考资源链接:[STC89C52单片机中文手册:概览与关键特性](https://wenku.csdn.net/doc/70t0hhwt48?spm=1055.2635.3001.10343)
# 1. STC89C52单片机简介及指令集概述
STC89C52单片机是基于经典的8051架构,广泛应用于嵌入式系统的开发中。它拥有8位处理器核心,其指令集简洁高效,针对实时控制应用进行了优化。本章将对STC89C52单片机进
【LabVIEW错误代码防不胜防】:开发者的10大陷阱与解决方案
参考资源链接:[LabVIEW错误代码大全:快速查错与定位](https://wenku.csdn.net/doc/7am571f3vk?spm=1055.2635.3001.10343)
# 1. LabVIEW错误代码的由来和影响
当我们进行LabVIEW开发时,错误代码是不可避免的。错误代码通常由不正确的程序执行引起,它们提供了解决问题的线索。了解错误代码的由来和
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )