【TDOA定位算法的MATLAB仿真】:步骤与技巧,快速提升定位精度
发布时间: 2024-12-14 13:10:54 阅读量: 3 订阅数: 2 

利用Matlab实现的二维TDOA定位算法仿真程序.rar

参考资源链接:[二维TDOA定位算法Chan实现MATLAB源代码](https://wenku.csdn.net/doc/18h77gejkp?spm=1055.2635.3001.10343)
# 1. TDOA定位算法基础概述
## 1.1 定位技术简介
定位技术在我们的生活中扮演着至关重要的角色。从GPS卫星导航到室内定位系统,它们都基于特定的定位算法。这些技术的准确性和效率对很多领域来说都是至关重要的,如紧急响应、军事应用、环境监控以及日常生活中的地图导航服务等。
## 1.2 TDOA定位技术原理
到达时间差(Time Difference of Arrival, TDOA)是众多定位技术中的一种,特别适用于无线信号环境。TDOA通过测量相同信号源到达不同接收点的时间差来确定信号源的位置。这一技术利用了信号传播速度是已知的这一特点,通过多点接收信号,计算它们之间的时间差,从而实现定位。
## 1.3 TDOA的应用场景
TDOA技术广泛应用于无线电定位系统,例如Wi-Fi定位、蜂窝网络中的定位以及专业的无线监听设备。这种技术的核心在于信号的到达时间差,而不是绝对的信号强度或者方位,这使得它在处理多径干扰时表现更为出色。因此,在需要高精度定位的场合,TDOA技术具有独特的优势。
# 2. MATLAB基础及仿真环境搭建
## 2.1 MATLAB软件功能与特点
### 2.1.1 MATLAB简介
MATLAB(Matrix Laboratory的缩写)是一种高性能的数值计算和可视化软件。它是MathWorks公司开发的一款用于算法开发、数据可视化、数据分析以及数值计算的高级编程语言和交互式环境。MATLAB以矩阵运算为基础,同时融入了大量用于工程计算的工具箱(Toolbox),使用户能够快速解决各种计算问题。
MATLAB的特点包括:
- 强大的数值计算能力,支持矩阵运算、函数拟合、统计分析等多种数学计算。
- 丰富的工具箱资源,涵盖信号处理、图像处理、通信系统、控制系统等多个专业领域。
- 高级的图形处理能力,提供二维、三维图形绘制及动画制作。
- 易于使用的编程环境,支持交互式操作和脚本编程。
- 便捷的数据输入输出功能,支持多种格式的数据导入导出。
- 强大的扩展性,用户可以编写自定义函数和工具箱。
### 2.1.2 MATLAB在信号处理中的应用
信号处理是MATLAB应用非常广泛的一个领域。MATLAB提供了许多专门用于信号处理的函数和工具箱,比如Signal Processing Toolbox,它包含了一系列用于信号生成、分析和滤波的高级工具。这些工具使得工程师和研究人员能够处理真实世界中的信号,比如声音、图像以及其他各种测量得到的信号。
MATLAB中的信号处理功能主要包括:
- 信号的生成和操作,如离散时间信号的创建、窗函数的使用等。
- 时域和频域分析,包括快速傅里叶变换(FFT)和短时傅里叶变换(STFT)等。
- 滤波器设计与分析,可以设计各种类型的滤波器,如FIR、IIR等。
- 参数估计和谱分析,如功率谱密度估计、自相关函数分析等。
- 信号的时频分析,如小波变换、Wigner-Ville分布等。
MATLAB的这些功能大大简化了信号处理流程,使得工程师能够更专注于算法设计和数据分析,而不需要过多地关注底层实现细节。
## 2.2 仿真环境的建立
### 2.2.1 MATLAB工具箱介绍
在搭建TDOA(Time Difference of Arrival)定位算法的仿真环境时,我们通常会使用到MATLAB的几个特定的工具箱。这些工具箱能够提供必要的函数和功能,以便于用户快速搭建起仿真模型,验证算法的有效性。下面列举了在进行TDOA仿真时可能会使用到的几个重要工具箱:
- **Signal Processing Toolbox(信号处理工具箱)**:提供了对信号进行分析和处理的函数,适用于设计和实现各种信号处理系统。
- **Communications System Toolbox(通信系统工具箱)**:用于建立复杂通信系统的仿真模型,包括调制解调、信道编码和解码、MIMO系统等。
- **Phased Array System Toolbox(阵列信号处理工具箱)**:专门用于设计、模拟和分析基于阵列的雷达、声纳、无线通信和音频系统。
### 2.2.2 建立TDOA仿真基础模型
要建立一个基本的TDOA定位仿真模型,我们需要模拟一个信号源在空间中的位置变化,并在多个接收点上记录信号到达的时间差。以下是建立这样一个模型的基本步骤:
1. **定义信号源和接收器的位置**:首先需要设置一个信号源的位置以及至少三个接收器的位置。接收器的位置需要满足非共线的条件。
2. **模拟信号源发射信号**:信号源可以发射一个简单的脉冲信号或者具有特定特征的调制信号,以便接收器能够检测并计算到达时间。
3. **计算时间差**:通过信号的到达时间,计算不同接收器之间的时间差。
4. **建立定位方程并求解**:基于TDOA的定位方程,结合时间差信息,计算出信号源的估计位置。
5. **分析和验证结果**:通过与已知的信号源位置进行对比,分析定位误差并尝试优化算法。
为了更进一步说明建立TDOA仿真模型的过程,下面给出一个简单的MATLAB代码示例:
```matlab
% 设定信号源位置和三个接收器位置
source_position = [0, 0, 0];
receiver_positions = [10, 0, 0; 0, 10, 0; 0, 0, 10];
% 模拟信号源发射信号并计算到达时间
% 为了简化问题,这里假设信号速度是恒定的
signal_speed = 340; % 声速,单位m/s
travel_times = sqrt(sum((receiver_positions - source_position).^2, 2)) / signal_speed;
% 假设第一个接收器时间为0,计算其它接收器的时间差
time_differences = [0, diff(travel_times)];
% 仿真结果分析
estimated_position = tdoaLocalization(time_differences, receiver_positions);
disp(['估计的信号源位置:', num2str(estimated_position)]);
```
在这个代码示例中,我们首先定义了信号源和接收器的位置坐标。然后我们计算了信号从源点到各个接收点的传播时间,并从中提取了时间差。最后,我们调用了名为`tdoaLocalization`的函数来根据时间差信息估计信号源的位置。这个函数需要用户自己实现,其内部逻辑将依据TDOA定位原理来求解信号源位置。
请注意,这个示例是一个非常简化的模型,它没有考虑信号传播的多径效应、噪声干扰以及时间同步误差等因素。在实际应用中,这些问题都需要被纳入考虑并采取相应的处理措施。
# 3. TDOA定位算法的理论基础与仿真步骤
## 3.1 TDOA定位算法的理论基础
### 3.1.1 TDOA定位原理简述
TDOA(Time Difference of Arrival)定位技术是一种通过测量信号到达不同接收点的时间差来确定信号源位置的方法。其核心思想是信号传播速度是恒定的,通过测量多个接收点接收同一信号的时间差,结合接收点的已知位置,可以计算出信号发射源的位置。这种方法在无线电定位、移动通信基站定位和无线传感器网络等领域有着广泛的应用。
TDOA算法相较于传统的AOA(Angle of Arrival)定位方法,其优点在于对信号发射源的发射功率没有具体要求,且不受信号极化特性的影响。此外,TDOA算法对时间同步的要求也相对较低,因此在实际应用中具有较大的灵活性。
### 3.1.2 定位方程及其求解方法
在TDOA定位中,通常需要至少三个非共线的接收点来确定二维平面上的一个定位点,或者四个非共面的接收点来确定三维空间中的定位点。接收点的位置通常是已知的,而信号发射点的位置则是未知的,需要通过解算TDOA方程组来求得。
对于二维空间定位,假设已知接收点A、B、C的坐标分别为(x1, y1)、(x2, y2)、(x3, y3),信号到达这些接收点的时间分别为t1、t2、t3。信号的传播速度为c,那么TDOA定位方程组可以表示为:
c(t2 - t1) = sqrt((x2 - x)^2 + (y2 - y)^2) - sqrt((x1 - x)^2 + (y1 - y)^2)
c(t3 - t1) = sqrt((x3 - x)^2 + (y3 - y)^2) - sqrt((x1 - x)^2 + (y1 - y)^2)
其中,(x, y)为信号发射源的坐标。通过非线性最小二乘法等数学工具,可以求解上述方程组得到信号发射源的位置。
## 3.2 TDOA算法仿真步骤详解
### 3.2.1 信号生成与发射仿真
在MATLAB环境中,首先需要生成信号波形,常见的信号类型有正弦波、方波、高斯脉冲等。以正弦波为例,生成函数可以表达为:
```matlab
t = 0:1e-9:1e-6; % 时间向量,步长为1纳秒,持续1微秒
f = 1e9; % 信号频率为1GHz
signal = sin(2*pi*f*t); % 生成正弦波信号
```
信号发射仿真可以模拟信号源从某一特定位置发出信号,到达不同接收点的时间。
### 3.2.2 时间差测量仿真
为了测量到达不同接收点的时间差,可以使用MATLAB内置的`crosscorr`函数计算两个信号的互相关。互相关函数的峰值对应的时间点即为时间差:
```matlab
% 假设signal1和signal2为两个接收点接收到的信号
[crossCorr, lag] = crosscorr(signal1, signal2);
timeDiff = lag / f; % 由于信号采样率已知,可以计算出时间差
```
### 3.2.3 定位计算与结果分析
根据仿真得到的时间差数据,可以设置优化问题求解信号发射源的位置。在MATLAB中,可以利用`fminsearch`函数或者`lsqnonlin`函数进行非线性最小二乘求解:
```matlab
% 定义目标函数,即最小化时间差平方和
f = @(x) (timeDiffAB - c*sqrt((x(2)-x1)^2 + (x(3)-y1)^2) + c*sqrt((x(2)-x2)^2 + (x(3)-y2)^2))^2 + ...
(timeDiffAC - c*sqrt((x(2)-x1)^2 + (x(3)-y1)^2) + c*sqrt((x(2)-x3)^2 + (x(3)-y3)^2))^2;
% 设置起始点
x0 = [0, 0, 0];
% 调用优化函数
[x_optimized, fval] = fminsearch(f, x0);
% x_optimized即为发射源的估计位置
```
通过上述步骤,我们就可以得到信号发射源的估计位置。接下来,可以通过与实际位置进行对比,分析定位精度和误差来源,以便进一步优化仿真模型。
在本章节中,我们介绍了TDOA定位算法的理论基础,并详细讲解了从信号生成、发射仿真到时间差测量和定位计算的仿真步骤。通过MATLAB仿真工具,我们可以更直观地理解和掌握TDOA算法,为接下来的定位精度优化和技术应用奠定了坚实的基础。
# 4. TDOA定位算法的关键技术与优化策略
在定位系统的实际部署和运行中,TDOA算法虽然能够提供精准的定位效果,但它的性能往往受限于环境因素和实施细节。本章节将深入探讨TDOA算法实现过程中的关键技术以及针对常见问题的优化策略。这包括时间同步误差的影响及校正方法、仿真参数优化和多径效应处理等,旨在提升算法在实际应用中的表现。
## 4.1 时间同步误差的影响与校正
TDOA定位算法对时间同步的要求非常高,任何微小的同步误差都可能对定位精度产生显著的影响。因此,时间同步误差的来源分析与校正方法是本节的重点内容。
### 4.1.1 时间同步误差来源分析
在TDOA定位系统中,时间同步误差主要来自硬件时钟偏差、信号传播时延以及信号处理延迟等方面。硬件时钟偏差指的是不同接收器之间由于晶振频率差异而导致的时间偏差;信号传播时延误差则是由无线信号在实际传播过程中,不同路径长度导致的时间差异;信号处理延迟误差则来自于信号在接收器内部进行的预处理、采样和信号处理等环节的延时。
### 4.1.2 时间同步误差校正方法
校正时间同步误差,首先需要识别误差的来源,然后采取相应的校正措施。例如,可以采用更加精确的时钟同步技术,如GPS同步或网络同步,以确保所有接收器能够以相同的频率进行计时。在硬件层面,可以使用更高精度的晶振来减少时钟偏差。
一个常见的校正方法是引入时间同步校正因子。通过测量已知距离点的时间差,可以计算出时间同步误差因子,并将其用于后续的信号处理和定位计算中,以校正误差。这一过程通常需要在系统部署之前进行严格的测试和校准。
代码块展示时间同步误差校正的逻辑分析和参数说明:
```matlab
% 假设已知一个参考点的坐标,计算接收到的信号时间差
% signal_delays: 一个数组,包含从各个接收器到参考点的信号时间差
% reference_position: 参考点的坐标,[x, y, z]
% target_position: 目标点的估计坐标,[x, y, z]
% 生成示例信号时间差数据
signal_delays = [0.013, 0.022, 0.019]; % 单位:秒
reference_position = [0, 0, 0]; % 原点
target_position = [100, 100, 0]; % 示例目标位置
% 计算实际距离与估算距离之间的差值
actual_differences = sqrt(sum((target_position - reference_position).^2));
estimated_differences = sqrt(sum(((target_position - reference_position)' - ...
signal_delays).^2));
% 计算同步误差因子
sync_error_factors = actual_differences ./ estimated_differences;
% 应用同步误差因子校正时间差
corrected_delays = signal_delays * sync_error_factors;
% 输出校正后的结果
disp(corrected_delays);
```
在上述示例中,我们通过比较实际距离与根据时间差估算出的距离,计算出一个校正因子,然后将此因子应用于时间差的校正。这仅仅是理论上的简化示例,实际应用中需要考虑更多的因素。
## 4.2 提升定位精度的仿真技巧
为了在仿真过程中尽可能地接近真实场景,必须优化仿真参数,并对多径效应进行有效处理。本节将探讨这两个提升定位精度的关键仿真技巧。
### 4.2.1 仿真参数的优化
仿真参数的优化包括信号发射功率、采样率、信噪比(SNR)等。优化这些参数可以帮助提高定位结果的可靠性。例如,增加信号发射功率可以提升信号的接收质量,降低噪声影响;适当的采样率能确保信号的完整采样,避免混叠现象。
在MATLAB中,可以使用仿真工具箱中的函数对上述参数进行配置。例如,调整采样率可以使用`resample`函数,设置信噪比可以使用`awgn`函数。仿真参数优化的代码示例如下:
```matlab
% 设置仿真参数
tx_power = 1; % 发射功率
fs = 1e6; % 采样率,1MHz
snr = 30; % 信噪比,30dB
% 生成信号
tx_signal = ... % 信号生成代码
% 信号发射和接收仿真
rx_signal = awgn(tx_signal, snr, 'measured'); % 添加噪声
% 信号重采样
resampled_signal = resample(rx_signal, 1, 2); % 将采样率降至500kHz
% 继续进行TDOA仿真...
```
### 4.2.2 多径效应的处理
多径效应是由无线信号在传播过程中遇到障碍物反射和折射所引起的现象。这会导致接收信号产生时延,从而对TDOA算法产生干扰。为了提高定位精度,必须对多径效应进行处理。
在仿真环境中,可以通过以下步骤处理多径效应:
1. 使用适当的信号传播模型(如Okumura-Hata模型)模拟多径信号。
2. 通过路径损耗和时间延迟对信号进行建模。
3. 应用信号处理技术,如Rake接收器,以合并多径信号。
处理多径效应的代码块示例如下:
```matlab
% 使用Okumura-Hata模型模拟信号传播
path_loss = okumuraHata(...); % 模型参数,如距离、频率等
% 计算多径信号的传播时延
multi_path_delays = ... % 多径信号时延计算代码
% 生成多径信号
multi_path_signals = ... % 多径信号生成代码
% 使用Rake接收器合并多径信号
rake接收器 = RakeReceiver(...); % 初始化Rake接收器
combined_signal = rake接收器.receive(multi_path_signals, ...); % 接收并合并信号
% 仿真继续...
```
在上述代码中,我们通过设置仿真环境中的路径损耗和多径时延,模拟了多径效应下的信号传播,并采用Rake接收器合并了多径信号。
在本章节中,我们重点探讨了TDOA算法中的关键技术与优化策略。首先分析了时间同步误差的来源,并介绍了其校正方法。然后,针对提升定位精度,我们探讨了仿真参数优化和多径效应的处理技术。这些优化措施对于提高TDOA算法在各种环境下的定位准确性至关重要。在下一章节中,我们将深入实际应用案例,了解TDOA算法在实际环境中的表现,并对比优化前后的效果。
# 5. TDOA定位算法的实战应用与案例分析
## 5.1 TDOA算法在实际中的应用案例
### 5.1.1 实际场景的TDOA仿真分析
TDOA算法在实际应用中,通常需要通过仿真来评估和预测其性能。例如,在室内定位系统中,三个接收器分别放置在室内不同位置,通过仿真模拟了信号发射源的位置变化以及信号传输过程中的衰减和干扰。在MATLAB环境下,可以创建一个三维空间的模型来表示室内场景,然后在该场景中添加信号发射源和接收器的虚拟实体。
在进行仿真分析时,通常需要考虑以下因素:
- 信号发射源的位置变化。
- 信号在不同介质中的传播速度。
- 噪声和多径效应对信号的影响。
通过仿真软件模拟真实环境下的信号传播和接收情况,可以获取到接收器所捕获的信号时间戳,进而计算出时间差。然后利用TDOA算法解算出发射源的位置坐标。
仿真过程中的代码块示例如下:
```matlab
% 定义发射源与接收器坐标
source_pos = [x0, y0, z0]; % 发射源位置
receiver_pos = [[x1, y1, z1], [x2, y2, z2], [x3, y3, z3]]; % 接收器位置
% 信号传播与接收
received_signals = sim_signal_propagation(source_pos, receiver_pos);
% 时间差测量
time_differences = measure_time_differences(received_signals);
% 定位计算
estimated_pos = tdoa_localization(time_differences, receiver_pos);
```
在上述代码中,`sim_signal_propagation` 函数用于模拟信号的传播过程,`measure_time_differences` 函数用于测量到达各个接收器的时间差,而 `tdoa_localization` 函数则根据时间差来计算发射源的估计位置。
### 5.1.2 定位精度的现场验证
现场验证是评估TDOA算法实际应用效果的关键步骤。通过在实际环境中部署信号发射源和接收器,可以收集真实的数据并分析算法的实际定位精度。在现场验证中,通常会记录下信号接收器捕获的时间戳,并将这些数据导入到仿真分析软件中,比较实际位置与算法计算位置之间的差异。
现场验证中,一般会用到以下设备和技术:
- GPS接收器或高精度时钟用于时间同步。
- 高灵敏度的信号接收器用于捕获信号。
- 记录设备用于存储接收时间戳和信号数据。
为了确保验证的准确性,应当选择具有代表性的场景,如开阔区域、复杂城市环境或室内空间等。此外,应当收集大量数据以覆盖不同的信号传播条件。
## 5.2 TDOA算法优化后的效果对比
### 5.2.1 优化前后定位精度对比
在实施TDOA算法优化策略后,例如引入了新的时间同步技术或改进了定位算法,需要对优化前后的定位精度进行对比评估。通常使用均方根误差(RMSE)作为评价指标,通过比较优化前后算法的RMSE值,可以直观地看到算法性能的改善情况。
进行优化效果对比时,可以依据以下步骤:
1. 在相同条件下,分别使用优化前后的算法进行定位。
2. 收集定位结果数据,并计算出每种情况下的RMSE值。
3. 比较两个RMSE值,分析优化策略带来的改进。
对比的代码示例如下:
```matlab
% 假设data_original和data_optimized分别存储了优化前后算法的定位结果
% 计算均方根误差
rmse_original = sqrt(mean((data_original - true_pos).^2));
rmse_optimized = sqrt(mean((data_optimized - true_pos).^2));
% 输出对比结果
fprintf('原始算法的RMSE: %.2f 米\n', rmse_original);
fprintf('优化算法的RMSE: %.2f 米\n', rmse_optimized);
```
在上面的代码中,`data_original` 和 `data_optimized` 分别代表优化前后算法的定位结果,而 `true_pos` 则是实际的已知位置。通过计算和比较RMSE值,可以明确优化前后的性能差异。
### 5.2.2 算法优化的效益评估
最后,为了全面评估TDOA算法优化的效果,需要从多个方面进行效益评估,包括但不限于定位精度、计算效率、系统的复杂度和实施成本等。效益评估需要在算法优化后进行全面测试,确保优化带来的改善是全面和可持续的。
效益评估的步骤可能包括:
- 详细记录优化前后各项性能指标的数据。
- 通过系统测试来检验优化算法的稳定性和可靠性。
- 评估优化实施的难度、成本以及可能需要的技术支持。
最终,效益评估报告应该提供一个清晰的优化效果概览,帮助决策者理解算法优化的实际价值,并为其进一步的开发和应用提供依据。
通过实际案例的分析和算法优化后的效果对比,可以看出TDOA定位算法在各种实际场景中的应用潜力以及优化改进所能带来的性能提升。这样的分析不仅可以帮助研究人员和工程师深入理解TDOA算法,也为未来的技术优化和发展提供了方向。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【LabVIEW视觉速成课】:快速构建你的首个视觉系统
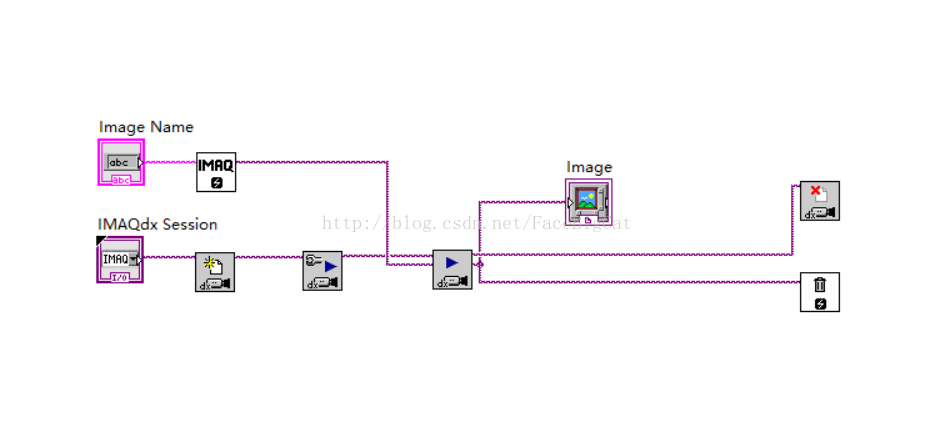
参考资源链接:[LabVIEW调用DLL指南:结构体与指针处理](https://wenku.csdn.net/doc/6g5m5mt2bn?spm=1055.2635.3001
易语言高效编程:超级列表框双击事件处理的15大黄金法则
参考资源链接:[易语言教程:超级列表框双击事件处理示例](https://wenku.csdn.net/doc/645dfc635928463033a3c835?spm=1055.2635.3001.10343)
# 1. 易语言双击事件基础
## 双击事件概述
在图形用户界面(GUI)编程中,双击事件是指用户两次快速连续点击鼠标左键的操作。易语言作为一款面向中文用户的编程语言,提供了丰富的事件处理机制,其中双击事件是最常见的交互方式之一。对于易语言开发者而言,理解和掌握双击事件的处理是构建互动应用程序的基础。
## 双击事件的基本概念
双击事件通常用于打开文件、执行命令或切换应用程序的状
【HP45喷墨打印头终极指南】:掌握打印头技术规格、维护、故障排除及性能优化

参考资源链接:[HP45喷墨打印头技术详解与DIY指南](https://wenku.csdn.net/doc/1fn71n61ee?spm=1055.2635.3001.10343)
# 1. HP45喷墨打印头概述
在当今数字化工作流程中,喷墨打印技术始终扮演着至关重要的角色。HP45喷墨打印头作为行业内的经典代表之一,拥有其独特的历史地位和广泛
WinCC与PLC通信设置:从新手到专家只需三步
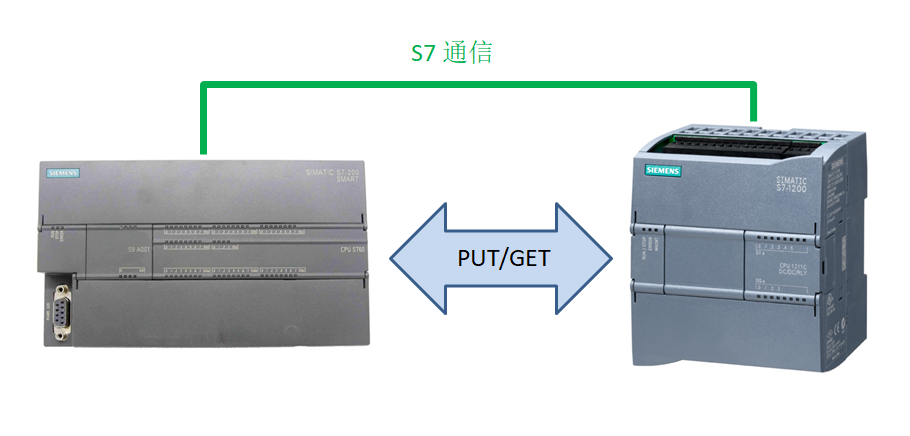
参考资源链接:[WinCC_flexible_SMART_V3SP1、SP2和WinccV7.3、WinccV7.4下载地址](https://wenku.csdn.net/doc/6412b5e8be7fbd1778d44d3e?spm=1055.2635.3001.10343)
# 1. WinCC与PLC通信概述
工业自动化领域中,WinCC和PLC的结合为数据采集、监控和控
无线通信技术详解:如何用Tse教材习题提升实战技能
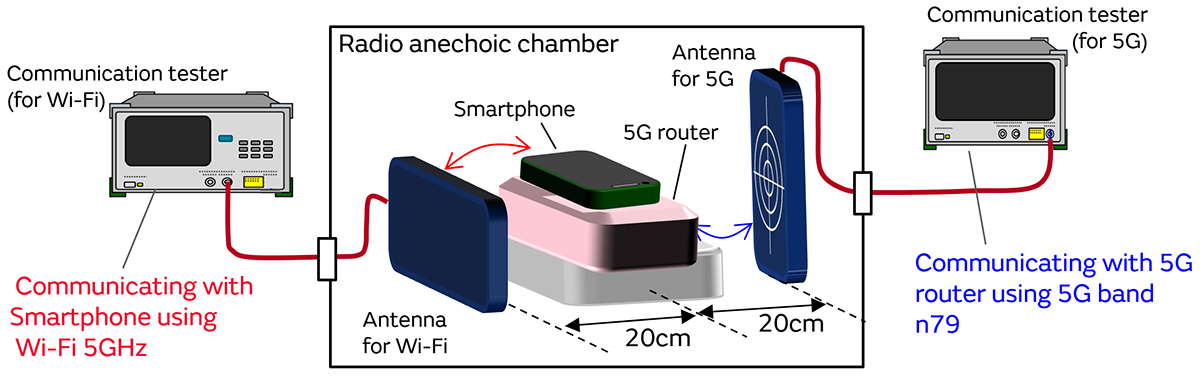
参考资源链接:[Fundamentals of Wireless Communication-David Tse -课后习题答案](https://wenku.csdn.net/doc/6412b4cdbe7fbd1778d40e14?spm=1055.2635.3001.10343
【通信协议精通】:IPMB通信协议高级特性与优化指南
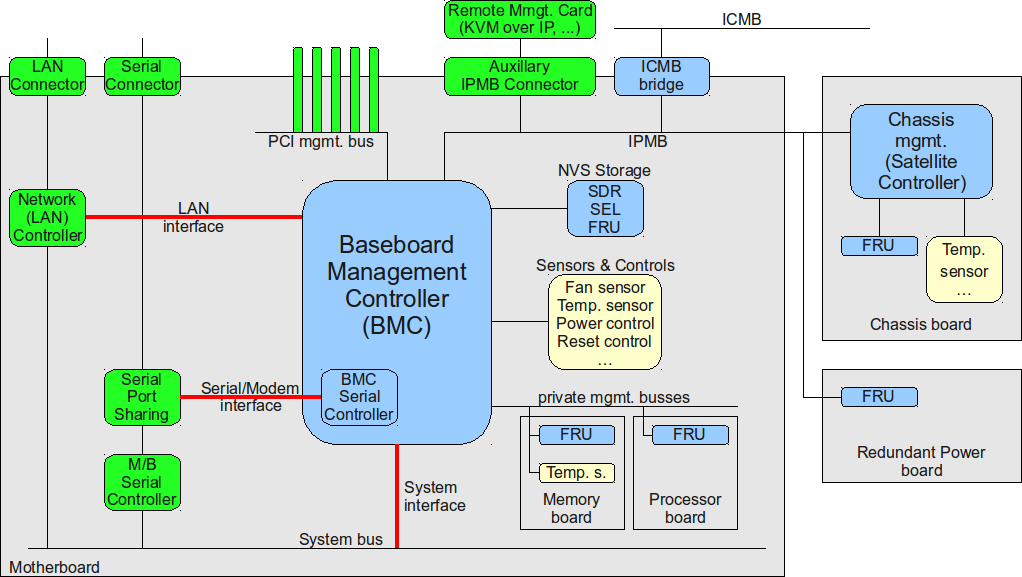
参考资源链接:[IPMB与I2C在服务器平台管理中的应用解析](https://wenku.csdn.net/doc/6412b511be7fbd1778d41d41?spm=1055.2635.3001.10343)
# 1. IPMB通信协议概述
IPMB(Intelligent Platform Management Bus)通信协议是用于计算机、服务器和
【Python代码实践】:跨平台Failed building wheel解决方案大公开

参考资源链接:[解决Python pip安装时'Failed building wheel for xxx'错误](https://wenku.csdn.net/doc/6412b720be7fbd1778d492f4?spm=1055.2635
【谐波齿轮减速器设计挑战】:5大策略应对极端环境
参考资源链接:[谐波齿轮减速器设计与三维建模研究](https://wenku.csdn.net/doc/647be332d12cbe7ec3377731?spm=1055.2635.3001.10343)
# 1. 谐波齿轮减速器设计基础
谐波齿轮减速器凭借其紧凑的结构和优异的传动性能,在各种精密传动系统中得到了广泛应用。本章将介绍谐波齿轮减速器的基础设计知识,为深入探讨其在极端环境下应
【PADS Layout定制化之路】:个性化BOM的5个自定义字段技巧

参考资源链接:[PADS LAYOUT导出BOM清单教程](https://wenku.csdn.net/doc/2qwcirrnpg?spm=1055.2635.3001.10343)
# 1. PADS Layout与BOM定制化基础
在现代电子制造和设计领域,PADS Layout软件已成为工程师们不可或缺的工具之一。它提供了强大的电路
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )