工业自动化中的定位革命:RTCM 3.3协议的应用与实践案例
发布时间: 2024-12-16 06:47:36 阅读量: 2 订阅数: 4 

rtcm3.3协议文档

参考资源链接:[RTCM 3.3协议详解:全球卫星导航系统差分服务最新标准](https://wenku.csdn.net/doc/7mrszjnfag?spm=1055.2635.3001.10343)
# 1. RTCM 3.3协议概述
在精密定位领域,RTCM (Radio Technical Commission for Maritime Services) 3.3协议已经成为全球导航卫星系统(GNSS)差分修正信息的标准格式。本章我们将对RTCM 3.3协议做一概览,为深入理解其技术基础和应用打下基础。
## 1.1 RTCM 3.3协议的定义和目的
RTCM 3.3协议是一套专门用于传输差分改正数据的标准,其目的是为了提升GNSS接收器的定位精度。这种协议由差分信号源发送,通常由地面基站广播,接收器通过解析这些信号,可以修正由大气条件和其他因素造成的定位误差。
## 1.2 RTCM 3.3的使用场景
RTCM 3.3广泛应用于需要高精度定位的领域,如农业、建筑、海洋导航、测绘以及无人驾驶车辆等。在这些领域,实时的、高精度的定位信息是不可或缺的,而RTCM 3.3正是提供这种服务的核心技术之一。
## 1.3 RTCM 3.3与其他协议的比较
相较于其他类似的协议,如RTCM SC-104版本,RTCM 3.3协议具有更强的纠错能力和更好的数据压缩效果。因此,它能在有限的带宽资源下提供更稳定、高效的差分信号。它的设计更加现代化,广泛支持各类GNSS系统,如GPS、GLONASS、Galileo和BeiDou。
通过本章的介绍,我们可以了解到RTCM 3.3协议在差分修正信息传输中的重要性,以及它的适用范围和优势。随着技术的发展,RTCM 3.3将继续在全球定位系统中扮演关键角色。在接下来的章节中,我们将深入探讨其技术基础和应用案例,揭示RTCM 3.3协议的更深层次内容。
# 2. RTCM 3.3协议的技术基础
## 2.1 RTCM协议族与RTCM 3.3标准
### 2.1.1 RTCM协议的发展历程
RTCM(Radio Technical Commission for Maritime Services)最初成立于20世纪40年代,旨在为海上无线电通信制定标准。随着时间的推移,RTCM开始涉足陆地移动无线电通信,并在20世纪80年代将注意力转向差分全球卫星导航系统(GNSS)。
在GNSS领域,RTCM定义了一系列标准,用于传输差分修正信号。RTCM SC-104(Special Committee No. 104)是专门负责制定这些标准的工作组,其推出的RTCM 3.x系列标准广泛应用于实时动态定位(RTK)系统中。RTCM 3.3是其中的重要标准,提供了更高效的数据编码方式和对新GNSS系统的支持,比如Galileo和BeiDou。
### 2.1.2 RTCM 3.3标准的核心特性
RTCM 3.3标准在保留了原有RTCM 2.x系列的信息结构和兼容性的同时,引入了更多的消息类型以支持新的卫星系统和功能。它定义了多达127种不同类型的消息,包括基础导航信息、卫星健康状况、大气延迟校正、定位和速度信息等。
一个显著的改进是RTCM 3.3引入了可变长度的消息结构,这使得传输更高效,因为可以根据需要发送的数据量动态调整消息长度。此外,RTCM 3.3还提高了对多频接收机的支持,允许在不同频率上发送校正数据,这对于提高定位精度和抗干扰能力是非常有益的。
## 2.2 RTCM 3.3协议的数据格式解析
### 2.2.1 RTCM消息结构详解
RTCM 3.3标准中定义的每个消息都遵循相同的基本结构。一个RTCM消息由三个主要部分组成:字头、消息头和消息体。
- **字头**: 通常是一个固定的8位同步字节(0xD3),用于标识消息的开始。
- **消息头**: 包括一个3位的版本号、一个5位的消息类型标识符和10位的长度信息,长度信息表示从字头之后到消息结束的字节数。
- **消息体**: 包含实际的数据内容,其结构依赖于消息类型。消息体可能包括卫星伪距修正、相位修正、参考站位置、卫星轨道参数等。
```markdown
| 同步字节 | 版本号 | 消息类型 | 长度信息 | 消息体 | 校验和 |
|----------|-------|--------|---------|-------|-------|
| 8 bits | 3 bits| 5 bits | 10 bits | ... | 16 bits|
```
### 2.2.2 差分信号的数据模型
在RTCM 3.3标准中,差分信号主要通过卫星伪距修正值来表示,这些修正值可以分为不同类型,例如整周模糊度和未校正的伪距。每个修正值都是根据参考站的已知位置计算出来的,用于修正移动站接收机的测量值。
差分信号的数据模型需要处理多种误差源,包括大气延迟、轨道误差、卫星钟差等。RTCM 3.3采用了一种称为“全整周模糊度”的方法,这种方法通过传输整周数来消除模糊度,从而提高定位的精度。
## 2.3 RTCM 3.3的信号传输技术
### 2.3.1 无线通信技术概述
RTCM 3.3标准支持多种无线通信技术,包括但不限于UHF无线电、蜂窝网络、甚至通过互联网进行数据传输。这些技术的选择取决于特定应用的环境、覆盖范围、成本和数据传输速率的要求。
- **UHF无线电**: 常用于近场通信,如建筑工地或农业领域,因其较好的穿透力和抗干扰能力而受到青睐。
- **蜂窝网络**: 适用于广域覆盖,但可能受到网络覆盖质量的影响。
- **互联网传输**: 需要稳定的网络连接,可以利用现有的网络基础设施进行数据传输,适合远程监控和控制。
### 2.3.2 RTCM 3.3在GNSS中的应用
RTCM 3.3在GNSS中的应用是差分GPS技术的核心,特别是在需要高精度定位的场合,如精确农业、测绘和自动驾驶领域。差分GPS技术利用一个固定位置的参考站来计算出卫星信号中的误差,然后将这些误差信息通过RTCM 3.3消息实时传送给移动站接收器。
在自动驾驶车辆的场景中,接收器必须能够实时接收到来自多个参考站的RTCM 3.3信号,以便准确计算出车辆的精确位置。这就要求车辆必须具备高级的信号处理能力,包括能够处理大量数据和高动态条件下的实时计算。
在本章节中,我们深入探讨了RTCM 3.3协议的技术基础,包括其在RTCM协议族中的地位、数据格式的结构以及在GNSS信号传输中的应用。接下来的章节将分析RTCM 3.3在具体应用中的集成和实践案例,为读者提供更多关于该协议实际应用的深入见解。
# 3. RTCM 3.3协议的实现与集成
## 3.1 RTCM 3.3在GNSS接收器中的集成
### 3.1.1 硬件集成要点
在GNSS接收器的硬件集成中,RTCM 3.3协议的实现首先需要考虑的是硬件平台的选择。硬件平台通常包括微控制器单元(MCU)、全球导航卫星系统(GNSS)模块、无线通信模块等。为了确保RTCM 3.3协议能够顺畅运行,接收器需要有足够的处理能力和内存资源。
硬件设计的要点在于确保所有组件之间的兼容性和高效的数据交换。例如,GNSS模块需能够提供差分修正数

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Ubuntu文件系统选择:专家推荐,匹配最佳安装场景

参考资源链接:[Ubuntu手动分区详解:步骤与文件系统概念](https://wenku.csdn.net/doc/6483e7805753293249e57041?spm=1055.2635.3001.10343)
# 1. Ubuntu文件系统概述
Linux操作系统中,文件系统扮演着存储和管理数据的核心角色。Ubuntu作为广泛使用的Linux发行版,支持多
飞腾 U-Boot 初始化流程详解:启动前的准备步骤(内含专家技巧)
参考资源链接:[飞腾FT-2000/4 U-BOOT开发与使用手册](https://wenku.csdn.net/doc/3suobc0nr0?spm=1055.2635.3001.10343)
# 1. 飞腾U-Boot及其初始化流程概述
飞腾U-Boot作为一款开源的引导加载器,是许多嵌入式系统的首选启动程序,尤其在飞腾处理器的硬件平台上占据重要地位
【Ubuntu上安装QuestaSim 2021终极指南】:全面优化性能与兼容性

参考资源链接:[Ubuntu 20.04 安装QuestaSim2021全步骤指南](https://wenku.csdn.net/doc/3siv24jij8?spm=1055.2635.3001.10343)
# 1. QuestaSim与数字仿真基础
## 数字仿真简述
数字仿真是一种技术手段,通过计算机模拟电子系统的操作过程,以预测系统对各种输入信号的响应。它在电子设计
HyperMesh材料属性设置:确保正确赋值与验证的秘诀
参考资源链接:[HyperMesh入门:网格划分与模型优化教程](https://wenku.csdn.net/doc/7zoc70ux11?spm=1055.2635.
MODBUS故障排查实战:使用MODSCAN32迅速诊断和解决问题

参考资源链接:[基于MODSCAN32的MODBUS通讯数据解析](https://wenku.csdn.net/doc/6412b5adbe7fbd1778d44019?spm=1055.2635.3001.10343)
# 1. MODBUS协议基础知识
MODBUS协议是工业领域广泛使用的一种简单、开放、可靠的通信协议。最初由Modicon公司开发,现已成为工业电子通信
MATPOWER潮流计算可视化解读:结果展示与深度分析

参考资源链接:[MATPOWER潮流计算详解:参数设置与案例示范](https://wenku.csdn.net/doc/6412b4a1be7fbd1778d40417?spm=1055.2635.3001.10343)
# 1. 潮流计算基础与MATPOWER简介
潮流计算是电力系统分析的基石,它涉及计算在不同
电源管理芯片应用详解:为单片机USB供电电路选型与配置指南
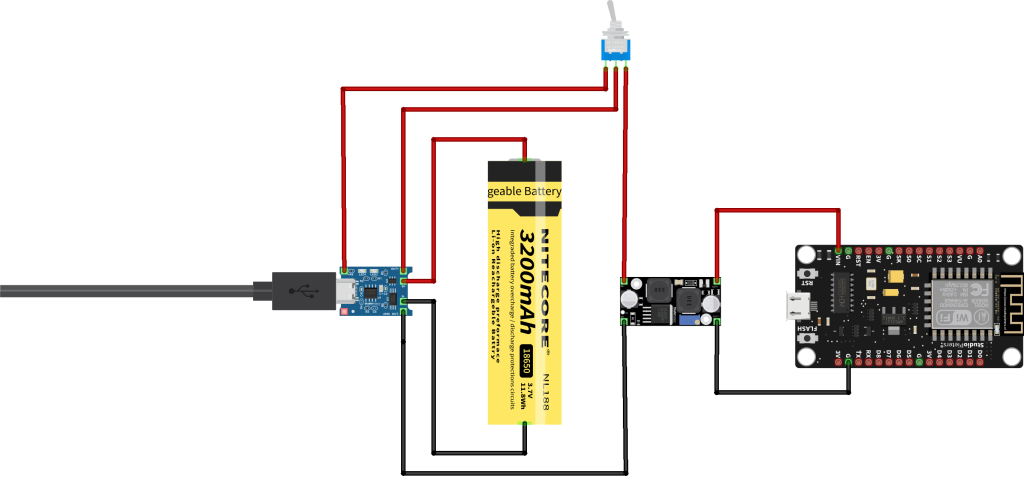
参考资源链接:[单片机使用USB接口供电电路制作](https://wenku.csdn.net/doc/6412b7abbe7fbd1778d4b20d?spm=1055.2635.3001.10343)
# 1. 电源管理芯片基础与重要性
电源管理芯片是电子系统中不可或缺的组件,它负责调节供电电压和电流,以确保各部分电子设备能够稳定、高效地工作。随着技术的进步,电源
10GBASE-R技术深度剖析:如何确保数据中心的网络性能与稳定性
参考资源链接:[10GBASE-R协议详解:从Arria10 Transceiver到PCS架构](https://wenku.csdn.net/doc/10ayqu73ib?spm=1055.2635.3001.10343)
# 1. 10GBASE-R技术概述
## 1.1 技术背景与定义
10GBASE-R技术是IEEE 802
【兼容性保证】:LAN8720A与IEEE标准的最佳实践

参考资源链接:[Microchip LAN8720A/LAN8720Ai: 低功耗10/100BASE-TX PHY芯片,全面RMII接口与HP Auto-MDIX支持](https://wenku.csdn.net/doc/6470614a543f844488
B-6系统集成挑战:与第三方服务无缝对接的7个策略
参考资源链接:[墨韵读书会:软件学院书籍共享平台详细使用指南](https://wenku.csdn.net/doc/74royby0s6?spm=1055.2635.3001.10343)
# 1. 系统集成与第三方服务对接概述
在当今高度数字化的商业环境中,企业运作越来越依赖于技术系统来优化流程、增强用户体验和提高竞争力。系统集成(
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )