STM32单片机电机控制:深入分析电机驱动原理,实现高效控制
发布时间: 2024-07-01 14:45:25 阅读量: 205 订阅数: 42 

# 1. 电机驱动基础**
电机驱动是控制电机旋转速度和方向的过程,在现代工业中有着广泛的应用。本章将介绍电机驱动基础知识,包括电机的基本原理、电机驱动器的类型和电机驱动控制方法。
**1.1 电机的基本原理**
电机是一种将电能转换成机械能的装置。电机的工作原理基于电磁感应定律,当电流流过导体时,会在导体周围产生磁场。当导体放置在磁场中时,导体会受到磁场力的作用而产生运动。
**1.2 电机驱动器的类型**
电机驱动器是控制电机旋转速度和方向的电子设备。电机驱动器根据其控制方式可分为以下几种类型:
- 直流电机驱动器:控制直流电机的速度和方向。
- 交流电机驱动器:控制交流电机的速度和方向。
- 步进电机驱动器:控制步进电机的运动。
# 2. STM32单片机电机驱动原理
### 2.1 STM32单片机电机驱动硬件架构
STM32单片机电机驱动硬件架构主要由以下模块组成:
- **微控制器 (MCU):**负责执行电机控制算法,接收传感器数据并生成控制信号。
- **电机驱动器:**放大MCU输出的控制信号,为电机提供所需的功率和电流。
- **传感器:**检测电机转速、位置和电流等信息,为MCU提供反馈。
- **电源模块:**为电机驱动系统提供稳定的电压和电流。
### 2.2 电机驱动算法
电机驱动算法是电机控制系统的大脑,负责根据传感器反馈和控制目标生成控制信号。常用的电机驱动算法包括:
#### 2.2.1 PID控制算法
PID控制算法是一种经典的反馈控制算法,通过调节比例、积分和微分增益来控制电机速度或位置。PID算法简单易实现,但需要根据电机特性进行参数整定。
#### 2.2.2 空间矢量调制算法
空间矢量调制算法 (SVM) 是一种高级电机控制算法,通过优化电机相电压的时序来实现高效的电机控制。SVM算法可以降低电机损耗,提高控制精度。
### 2.3 电机驱动保护机制
电机驱动系统需要完善的保护机制来防止电机和驱动器损坏。常见的保护机制包括:
- **过流保护:**当电机电流超过安全阈值时,保护机制会断开电机电源。
- **过压保护:**当电机电压超过安全阈值时,保护机制会断开电机电源。
- **过热保护:**当电机或驱动器温度过高时,保护机制会断开电机电源。
- **短路保护:**当电机或驱动器发生短路时,保护机制会断开电机电源。
# 3. STM32单片机电机驱动实践
### 3.1 电机驱动电路设计
电机驱动电路设计是电机驱动系统的基础,其主要目的是将单片机的控制信号转换为驱动电机所需的电信号或功率信号。电机驱动电路一般包括以下几个部分:
- **功率器件:**功率器件是电机驱动电路的核心,其作用是将单片机的控制信号放大并驱动电机。常用的功率器件有MOSFET、IGBT等。
- **驱动电路:**驱动电路的作用是为功率器件提供足够的驱动电流,以确保功率器件能够正常工作。驱动电路一般采用专用驱动芯片或分立元件设计。
- **保护电路:**保护电路的作用是防止电机驱动电路和电机本身受到损坏。常见的保护电路有过流保护、过压保护、欠压保护等。
### 3.2 电机驱动程序开发
电机驱动程序开发是电机驱动系统的重要组成部分,其作用是将单片机的控制算法转换为电机驱动电路所需的控制信号。电机驱动程序一般包括以下几个部分:
#### 3.2.1 PWM信号生成
PWM(脉宽调制)信号是一种周期性变化的方波信号,其占空比可以用来控制电机的转速和方向。PWM信号的生成可以通过单片机的定时器外设实现。
```c
// STM32F103系列定时器PWM信号生成示例代码
#include "stm32f10x.h"
int main(void)
{
// 初始化定时器3
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_TimeBaseStructure.TIM_Period = 1000 - 1; // 1kHz PWM频率
TIM_TimeBaseStructure.TIM_Prescaler = 72 - 1; // 72MHz时钟分频
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBase
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
STM32单片机以其强大的性能、丰富的功能和广泛的应用而备受青睐。本专栏深入剖析了STM32单片机的各个方面,包括其核心架构、存储器管理、时钟系统、中断系统、通信接口、外设资源、开发环境、调试技巧、应用案例、与其他单片机的对比、性能优化、电源管理、安全特性、实时性分析、调试技术、嵌入式操作系统、图形用户界面设计、网络连接和电机控制。通过这些文章,读者将全面了解STM32单片机的优势,并掌握其使用技巧,从而为嵌入式系统开发提供宝贵的指导和参考。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
大样本理论在假设检验中的应用:中心极限定理的力量与实践
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
NumPy在金融数据分析中的应用:风险模型与预测技术的6大秘籍

# 1. NumPy基础与金融数据处理
金融数据处理是金融分析的核心,而NumPy作为一个强大的科学计算库,在金融数据处理中扮演着不可或缺的角色。本章首先介绍NumPy的基础知识,然后探讨其在金融数据处理中的应用。
## 1.1 NumPy基础
NumPy(N
【品牌化的可视化效果】:Seaborn样式管理的艺术

# 1. Seaborn概述与数据可视化基础
## 1.1 Seaborn的诞生与重要性
Seaborn是一个基于Python的统计绘图库,它提供了一个高级接口来绘制吸引人的和信息丰富的统计图形。与Matplotlib等绘图库相比,Seaborn在很多方面提供了更为简洁的API,尤其是在绘制具有多个变量的图表时,通过引入额外的主题和调色板功能,大大简化了绘图的过程。Seaborn在数据科学领域得
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
正态分布与信号处理:噪声模型的正态分布应用解析
# 1. 正态分布的基础理论
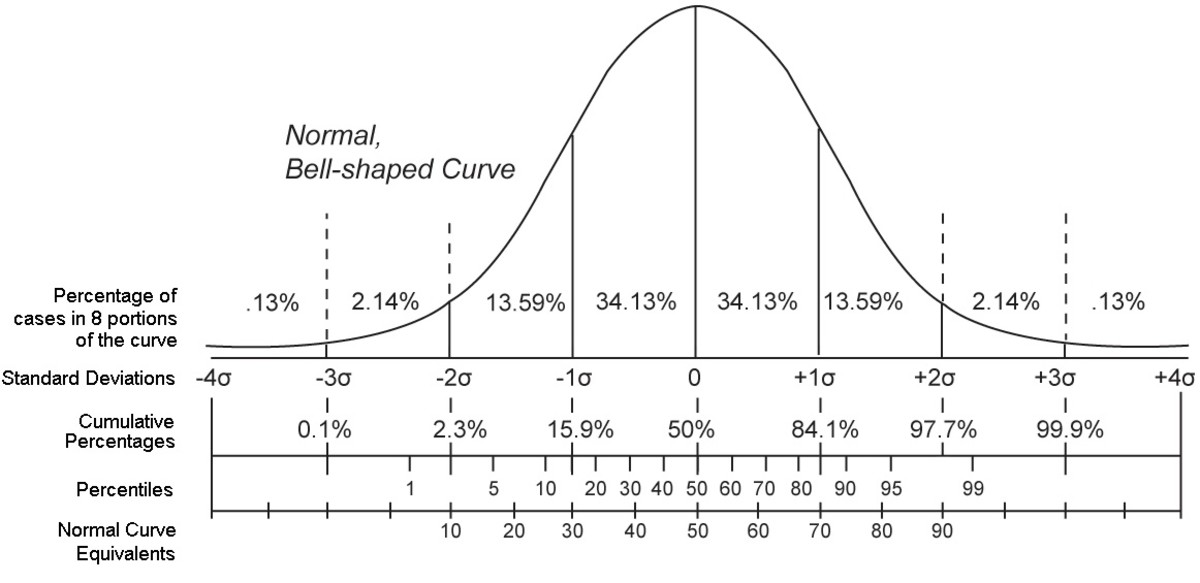
正态分布,又称为高斯分布,是一种在自然界和社会科学中广泛存在的统计分布。其因数学表达形式简洁且具有重要的统计意义而广受关注。本章节我们将从以下几个方面对正态分布的基础理论进行探讨。
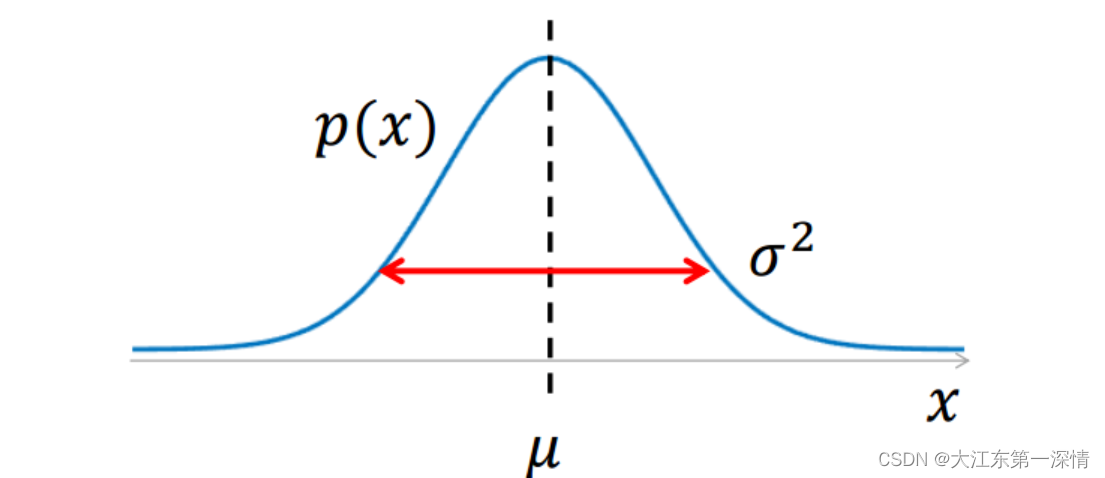
## 正态分布的数学定义
正态分布可以用参数均值(μ)和标准差(σ)完全描述,其概率密度函数(PDF)表达式为:
```math
f(x|\mu,\sigma^2) = \frac{1}{\sqrt{2\pi\sigma^2}} e
【置信区间进阶课程】:从理论到实践的深度剖析
# 1. 置信区间的统计学基础
## 统计学中的中心极限定理
在统计学中,中心极限定理是一个至关重要的概念,它为我们在样本量足够大时,可以用正态分布去近似描述样本均值的分布提供了理论基础。这一理论的数学表述虽然复杂,但其核心思想简单:不论总体分布如何,只要样本量足够大,样本均值的分布就趋向于正态分布。
## 置信区间的概念与意义
置信区间提供了一个区间估
【线性回归时间序列预测】:掌握步骤与技巧,预测未来不是梦
# 1. 线性回归时间序列预测概述
## 1.1 预测方法简介
线性回归作为统计学中的一种基础而强大的工具,被广泛应用于时间序列预测。它通过分析变量之间的关系来预测未来的数据点。时间序列预测是指利用历史时间点上的数据来预测未来某个时间点上的数据。
## 1.2 时间序列预测的重要性
在金融分析、库存管理、经济预测等领域,时间序列预测的准确性对于制定战略和决策具有重要意义。线性回归方法因其简单性和解释性,成为这一领域中一个不可或缺的工具。
## 1.3 线性回归模型的适用场景
尽管线性回归在处理非线性关系时存在局限,但在许多情况下,线性模型可以提供足够的准确度,并且计算效率高。本章将介绍线
Pandas数据转换:重塑、融合与数据转换技巧秘籍
# 1. Pandas数据转换基础
在这一章节中,我们将介绍Pandas库中数据转换的基础知识,为读者搭建理解后续章节内容的基础。首先,我们将快速回顾Pandas库的重要性以及它在数据分析中的核心地位。接下来,我们将探讨数据转换的基本概念,包括数据的筛选、清洗、聚合等操作。然后,逐步深入到不同数据转换场景,对每种操作的实际意义进行详细解读,以及它们如何影响数
从Python脚本到交互式图表:Matplotlib的应用案例,让数据生动起来

# 1. Matplotlib的安装与基础配置
在这一章中,我们将首先讨论如何安装Matplotlib,这是一个广泛使用的Python绘图库,它是数据可视化项目中的一个核心工具。我们将介绍适用于各种操作系统的安装方法,并确保读者可以无痛地开始使用Matplotlib
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )