点云分段与特征提取在MATLAB中的实现
发布时间: 2024-04-04 01:11:49 阅读量: 260 订阅数: 49 
# 1. 点云数据简介
## 1.1 什么是点云数据
点云数据是由大量的点构成的三维数据集合,每个点都具有空间位置信息和可能的属性信息。点云数据可以用来表示物体的表面或环境的结构,通常通过激光扫描、摄像头采集等方式获取。
## 1.2 点云数据在计算机视觉和机器学习中的应用
在计算机视觉领域,点云数据常用于三维重建、物体识别、场景分割等任务中。而在机器学习中,点云数据通常用作输入,用于训练各种模型,如神经网络、支持向量机等。
## 1.3 MATLAB中处理点云数据的优势
MATLAB提供了丰富的工具和库,能够方便地进行点云数据的导入、处理、分析以及可视化。通过MATLAB,用户可以快速实现各种点云处理算法,加快开发速度,提高效率。
# 2. 点云分割技术概述
2.1 点云分割的定义与作用
2.2 常见的点云分割算法
2.3 选择合适的分割算法的考虑因素
在点云数据处理中,分割是将点云数据划分为具有相似特征或属性的子集的过程。点云分割技术的主要目的是将复杂的点云数据集分解为更小、更易处理的部分,以便进一步分析和处理。
### 2.1 点云分割的定义与作用
点云分割的定义是在点云数据中找到一组局部点,这些点在某种方面具有一致性,并区分于其余点云。点云分割的作用包括但不限于:
- **简化数据集**:将一个大的点云数据集拆分为多个小部分,便于分析和处理。
- **识别目标**:通过区分不同部分的特征,可以更容易地识别点云中的不同对象或目标。
- **减少计算复杂度**:对局部分割进行分析和处理比对整个点云进行操作更加高效。
### 2.2 常见的点云分割算法
在点云数据处理领域,有许多经典的点云分割算法,常见的算法包括但不限于:
- **基于区域生长的分割**:通过定义生长准则,将局部点云逐步聚合成更大的区域。
- **基于法向量的分割**:根据点云点的法向量信息,将相似法向的点划分到同一区域。
- **聚类算法**:如K-means、DBSCAN等聚类算法也可应用于点云分割任务。
### 2.3 选择合适的分割算法的考虑因素
在选择适合的点云分割算法时,需要考虑以下因素:
- **数据特征**:不同的点云数据集可能有不同的特征,选择适合数据特征的算法更容易得到好的分割效果。
- **计算复杂度**:不同算法在计算消耗上有差异,需要根据数据规模和计算资源选择合适的算法。
- **精度要求**:不同算法对于分割的精度要求不同,需要根据具体应用场景来选择算法来满足精度要求。
综上所述,点云分割是点云数据处理中的重要步骤,选择合适的分割算法将对后续的点云数据处理和分析产生重要影响。
# 3. 基于MATLAB的点云分割实现
在处理点云数据时,点云分割是一项非常关键的任务,它可以将点云数据分成不同的部分或者对象,有助于后续的特征提取和目标识别。在MATLAB中,我们可以通过一些算法和工具来实现点云的分割。
#### 3.1 导入和可视化点云数据
首先,我们需要导入点云数据。MATLAB提供了`pcread`函数来加载常见的点云文件格式,比如PLY、PCD等。加载完成后,我们可以使用`pcshow`函数来可视化点云数据,以便更直观地了解数据的结构和形状。
```matlab
ptCloud = pcread('pointCloud.ply');
pcshow(ptCloud);
```
#### 3.2 基于区域生长算法的点云分割步骤
一种常见的点云分割算法是区域生长算法。该算法从种子点开始,逐步将周围与种子点相似的点添加到同一分割区域中,直到满足停止条件为止。在MATLAB中,我们可以使用`pcsegdist`函数实现基于距离的区域生长分割。
```matlab
segments = pcsegdist(ptCloud, 'MaxNumTrials', 100);
```
#### 3.3 实例演示:在MATLAB中实现点云分割
下面是一个简单的示例演示,在MATLAB中如何进行点云分割,并可视化显示分割结果。
```matlab
ptCloud = pcread('pointCloud.ply');
pcshow(ptCloud);
segments = pcsegdist(ptCloud, 'MaxNumTrials', 100);
figure;
hold on;
for i = 1:numel(segments)
pcshow(segments{i});
end
hold off;
```
通过以上步骤,我们可以在MATLAB中完成点云数据的分割,并对不同的分割部分进行可视化展示。这为后续的特征提取和分析奠定了基础。
# 4. 点云特征提取方法介绍
在点云数据处理中,特征提取是一个至关重要的步骤,通过提取点云中的特征信息,可以帮助我们更好地理解点云数据,并且为后续的任务如目标识别、分类等提供基础。本章将介绍点云特征提取的定义、常用的特征描述符以及特征提取在目标识别中的重要性。
#### 4.1 点云特征提取的定义与作用
点云特征提取是指从点云数据中提取具有描述性质的特征信息的过程。这些特征可以是点的几何信息、法向信息、曲率信息等,有助于表征点云数据的形状、结构等特征。通过特征提取,我们可以降低数据的维度、简化数据表示,帮助算法更好地理解和处理点云数据。
#### 4.2 常用的点云特征描述符
在点云数据处理中,常用的点云特征描述符包括但不限于以下几种:
- 3D形状上下文描述符(3D Shape Context Descriptor)
- 点的法向直方图(Normal Histogram)
- 点的曲率(Curvature)
- 点的颜色直方图(Color Histogram)
- 点的密度(Density)
每种特征描述符都有其特定的计算方法和应用场景,根据实际需求选择合适的特征来描述点云数据,是提高点云处理效果的关键。
#### 4.3 特征提取在目标识别中的重要性
在目标识别任务中,点云特征提取是不可或缺的一步。通过提取目标点云的特征信息,可以将点云数据转换为计算机能够理解和处理的形式,从而实现对目标的识别、分类等任务。合适的特征描述符可以帮助算法更好地区分不同类别的目标,并提高目标识别的准确性和鲁棒性。
通过本节介绍,读者将了解到点云特征提取的概念、常见的特征描述符以及特征提取在目标识别中的重要性,为后续的实践操作奠定基础。
# 5. 利用MATLAB进行点云特征提取
点云特征提取在点云数据处理中起着至关重要的作用,它可以帮助我们更好地理解点云数据的特性并为后续的机器学习和目标识别提供帮助。下面将介绍如何在MATLAB中实现点云的特征提取。
#### 5.1 基本特征提取算法的原理与实现
基本的点云特征提取算法通常包括计算点云的几何特征和统计特征。几何特征可以包括点云的法向量、曲率等信息,而统计特征可以包括点云的直方图、拓扑结构等。这些特征能够反映点云数据的形状和结构,为后续的分析提供基础。
在MATLAB中,可以使用PointCloud对象提供的函数来实现基本的特征提取。通过计算点云中每个点的邻域信息,可以得到点云的法向量、曲率等几何特征;通过统计学方法,可以计算出点云的直方图等统计特征。以下是一个示例代码:
```matlab
% 导入点云数据
ptCloud = pcread('point_cloud.ply');
% 计算点云的法向量
normals = pcnormals(ptCloud);
% 计算点云的曲率
curvatures = pccurvatures(ptCloud);
% 计算点云的直方图
histogram = pcbin(ptCloud);
```
#### 5.2 基于形状上下文描述符的点云特征提取
形状上下文描述符是一种常用的点云特征提取方法,它通过描述点云中每个点的局部几何形状来表征整个点云的形状信息。在MATLAB中,可以使用Shape Context Descriptors Toolbox实现形状上下文描述符的计算。以下是一个示例代码:
```matlab
% 导入点云数据
ptCloud = pcread('point_cloud.ply');
% 计算形状上下文描述符
scd = shapeContext(ptCloud);
```
#### 5.3 实例演示:在MATLAB中提取点云特征
接下来,我们将结合实际的点云数据,在MATLAB中提取点云的特征,并进行可视化展示。通过这个实例演示,读者可以更好地理解点云特征提取的过程和结果。
# 6. 结合分割和特征提取的应用案例
在点云数据处理中,将点云分割和特征提取相结合是非常有意义的。通过分割可以将点云数据划分为不同的部分或对象,然后针对每个部分进行特征提取,可以更好地描述和识别点云中的不同目标。这种结合使用的方法在目标识别、场景理解和三维重建等领域具有广泛应用。
#### 6.1 将点云分段和特征提取结合的意义
- 点云分割可帮助将复杂的点云数据划分为更易处理的部分,有助于减少后续处理的复杂性和计算量。
- 特征提取可以从不同角度描述点云数据的形状、结构或属性,有助于更准确地表征目标并进行区分。
- 结合分割和特征提取,可以提高点云数据的处理效率和识别准确度,为后续的机器学习和深度学习任务奠定基础。
#### 6.2 实际案例分析:基于MATLAB的点云分割和特征提取应用
在MATLAB中结合点云分割和特征提取可以采用以下步骤:
1. 使用合适的点云分割算法对数据进行划分,得到不同的子点云。
2. 对每个子点云进行特征提取,例如计算形状特征、法向量、曲率等。
3. 将提取到的特征用于目标识别、分类或其他应用。
下面是一个简单的示例代码,演示如何在MATLAB中结合点云分割和特征提取:
```matlab
% 导入点云数据
ptCloud = pcread('example.ply');
% 点云分割
segIndices = regionGrowingSegmentation(ptCloud);
% 特征提取
features = extractFeatures(ptCloud.Location, segIndices);
% 显示分割结果和特征
figure;
pcshow(ptCloud.Location, segIndices);
title('Point Cloud Segmentation');
xlabel('X');
ylabel('Y');
zlabel('Z');
disp('Features extracted:');
disp(features);
```
通过以上代码,可以看到如何在MATLAB中结合点云分割和特征提取的步骤,并展示了处理结果。
#### 6.3 总结与展望:未来在点云分析领域的发展方向
随着点云数据在各领域的广泛应用,结合分割和特征提取的技术将继续发展壮大。未来的研究方向包括优化分割和提取算法、提高处理效率、探索更多的特征描述符以及结合深度学习等方面,以更好地应对复杂的点云数据处理任务,并推动点云在计算机视觉和人工智能领域的应用。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了点云八叉树在 MATLAB 中的广泛应用。它涵盖了从基础概念和原理到实用算法和技术的各个方面。读者将了解点云八叉树如何用于点云数据的导入、处理、分段、特征提取和管理。专栏还提供了基于八叉树的点云快速搜索算法、可视化方法、滤波算法、配准算法、目标检测和识别技术、数据重构和拟合方法、分割技术、稀疏点云数据处理、地图构建和定位技术、多视角融合算法以及深度学习方法。通过详细的解释、代码示例和可视化演示,该专栏为研究人员、工程师和学生提供了在 MATLAB 中有效利用点云八叉树的全面指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【GP系统集成实战】:将GP Systems Scripting Language无缝融入现有系统

# 摘要
GP系统脚本语言作为一种集成和自动化工具,在现代企业信息系统中扮演着越来越重要的角色。本文首先概述了GP系统脚本语言的核心概念及其集成的基础理论,包括语法结构、执行环境和系统集成的设计原则。随后,文章深入探讨了GP系统集成的实战技巧,涵盖数据库集成、网络功能、企业级应用实践等方面。此外,本文还分析了GP系统集成在高
【Twig模板性能革命】:5大技巧让你的Web飞速如风

# 摘要
Twig作为一款流行的模板引擎,在现代Web开发中扮演着重要角色,它通过高效的模板语法和高级特性简化了模板的设计和维护工作。本文从Twig的基本语法开始,逐步深入到性能优化和实际应用技巧,探讨了模板继承、宏的使用、自定义扩展、
【正确方法揭秘】:爱普生R230废墨清零,避免错误操作,提升打印质量
# 摘要
废墨清零是确保打印机长期稳定运行的关键维护步骤,对于保障打印质量和设备性能具有重要的基础作用。本文系统介绍了废墨清零的基础知识、操作原理、实践操作以及其对打印质量的影响。通过对废墨产生、积累机制的理解,本文阐述了废墨清零的标准操作步骤和准备工作,同时探讨了实践中可能遇到的问题及其解决方法。文章还分析了废墨清零操作如何正面影响打印质量,并提出了避免错误操作的建议。最后,本文探讨了其他提升打印质量的方法和技巧,包括硬件选择、日常维护
【降噪耳机功率管理】:优化电池使用,延长续航的权威策略

# 摘要
本文全面探讨了降噪耳机的功率管理问题,从理论基础到实践应用,再到未来发展趋势进行了系统性的分析。首先介绍了降噪耳机功率消耗的现状,并探讨了电池技术与功耗管理系统设计原则。随后,文章深入到硬件节能技术、软件算法以及用户交互等方面的实际功率管
避免K-means陷阱:解决初始化敏感性问题的实用技巧
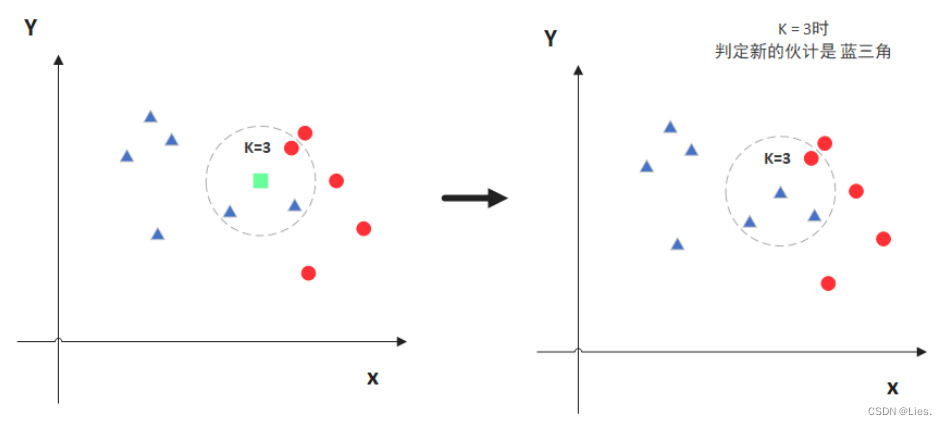
# 摘要
K-means聚类算法作为一种广泛使用的无监督学习方法,在数据分析和模式识别领域中发挥着重要作用。然而,其初始化过程中的敏感性问题可能导致聚类结果不稳定和质量不一。本文首先介绍了K-means算法及其初始化问题,随后探讨了初始化敏感性的影响及传统方法的不足。接着,文章分析了聚类性能评估标准,并提出了优化策略,包括改进初始化方法和提升聚类结果的稳定性。在此基础上,本文还展示了改进型K-means
STM32 CAN扩展应用宝典:与其他通信协议集成的高级技巧

# 摘要
本论文重点研究了STM32微控制器在不同通信协议集成中的应用,特别是在CAN通信领域的实践。首先介绍了STM32与CAN通信的基础知识,然后探讨了与其他通信协议如RS232/RS485、以太网以及工业现场总线的集成理论和实践方法。详细阐述了硬件和软件的准备、数据传输、错误处理、安全性增强等关键技术点。本文还提供了在STM32平台上实现高性能网络通信的高
ARCGIS分幅图打印神技:高质量输出与分享的秘密
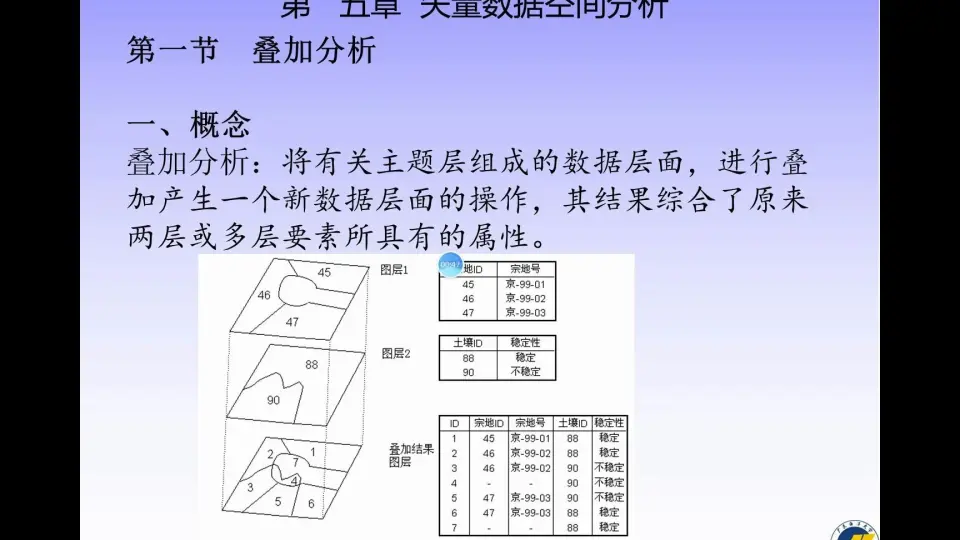
# 摘要
ARCGIS分幅图打印在地图制作和输出领域占据重要地位,本论文首先概述了分幅图打印的基本概念及其在地图输出中的作用和标准规范。随后,深入探讨了分幅图设计的原则,包括用户界面体验与输出质量效率的平衡,以及打印的技术要求,例如分辨率选择和色彩管理。接着,本文提供了分幅图制作和打印的实践技巧,包括数据处理、模板应用、打印设置及输出保存方法。
【install4j更新机制深度剖析】:自动检测与安装更新的高效方案
# 摘要
随着软件维护和分发需求的增加,自动更新工具的开发变得日益重要。本文对install4j更新机制进行了全面的分析,介绍了其市场定位和更新流程的必要性。文章深入解析了update检测机制、安装步骤以及更新后应用程序的行为,并从理论基础和实践案例两个维度探讨
【多网络管理】:Quectel-CM模块的策略与技巧

# 摘要
随着物联网技术的发展,多网络管理的重要性日益凸显,尤其是在确保设备在网络间平滑切换、高效传输数据方面。本文首先强调多网络管理的必要性及其应用场景,接着详细介绍Quectel-CM模块的硬件与软件架构。文章深入探讨了基于Quectel-CM模块的网络管理策略,包括网络环境配置、状态监控、故
【ETL与数据仓库】:Talend在ETL过程中的应用与数据仓库深层关系
# 摘要
随着信息技术的不断发展,ETL(提取、转换、加载)与数据仓库已成为企业数据处理和决策支持的重要技术。本文首先概述了ETL与数据仓库的基础理论,明确了ETL过程的定义、作用以及数据抽取、转换和加载的原理,并介绍了数据仓库的架构及其数据模型。随后,本文深入探讨了Talen
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )