ETAS AUTOSAR操作系统深度分析:任务调度与内存管理技巧
发布时间: 2025-01-08 23:36:34 阅读量: 6 订阅数: 11 

ETAS autosar 用户手册.pdf
# 摘要
ETAS AUTOSAR操作系统在现代汽车电子领域中扮演着核心角色,其高效的内存管理和任务调度机制对于实时性能和系统稳定性至关重要。本文首先介绍了ETAS AUTOSAR操作系统的相关概念,随后深入探讨了任务调度的基础知识,包括不同调度策略和实际操作中的应用。在内存管理方面,本文详细解释了内存分配与回收机制,并分析了内存泄漏的原因及解决策略。随后,文章重点介绍了ETAS AUTOSAR系统内存管理优化技术,如内存碎片处理和高效分配算法,以及如何进行内存管理的监控与性能评估。最后,通过嵌入式系统和汽车电子的实际案例分析,本文展示了任务调度与内存管理优化的高级应用,并对未来的发展趋势进行了展望,提出了在新挑战下的技术发展和改进方向。
# 关键字
ETAS AUTOSAR;任务调度;内存管理;内存泄漏;性能评估;实时操作系统
参考资源链接:[ETAS ASCET V6.4 AUTOSAR 使用指南](https://wenku.csdn.net/doc/87bua6zscf?spm=1055.2635.3001.10343)
# 1. ETAS AUTOSAR操作系统概述
ETAS AUTOSAR操作系统是汽车电子领域中不可或缺的组件,它为车辆的电子控制单元(ECU)提供一个标准化的软件平台。该操作系统的设计目标是支持高效的任务管理、内存使用和实时性控制,以满足汽车行业对可靠性和实时性能的严苛要求。在本章中,我们将深入了解ETAS AUTOSAR操作系统的基本架构,它的关键特性,以及在现代汽车电子系统中的应用。我们将从它的设计哲学开始,逐步过渡到它如何支撑在实时环境中的多任务处理和内存管理。这一章节将为后续深入探讨任务调度和内存管理打下坚实的理论基础。
# 2. 任务调度机制的理论与实践
## 2.1 任务调度的基础知识
### 2.1.1 任务调度的定义和重要性
任务调度是操作系统中最核心的功能之一,其主要目的是在有限的资源条件下,合理地分配处理时间给各个任务,以满足系统的实时性、效率性和公平性要求。在实时操作系统(RTOS)中,任务调度的重要性更是凸显,因为这些系统通常要求在规定的时间内完成特定的任务,以保证系统的稳定运行。
任务调度的决策机制通常基于任务的优先级以及任务的状态(就绪、运行、阻塞、挂起等),它决定了哪个任务将占用CPU执行,以及何时执行。良好的任务调度策略不仅可以提高系统的性能,而且还可以满足实时任务的截止时间要求,保证系统的实时性。
### 2.1.2 调度策略和算法概览
任务调度算法多种多样,不同的调度算法针对不同的系统需求和应用场景。典型的调度算法包括先来先服务(FCFS)、短作业优先(SJF)、优先级调度(包括静态优先级和动态优先级)和时间片轮转(RR)等。每种算法都有其优缺点,因此在实际应用中,需要根据系统的特性来选择合适的调度算法。
- 先来先服务(FCFS):任务按照到达顺序进行排队,先到的任务先执行,这种算法简单易于实现,但可能导致“饥饿”问题。
- 短作业优先(SJF):系统优先执行预计运行时间最短的任务,这种算法可以最小化平均等待时间,但对于长作业来说不公平。
- 优先级调度:任务根据预设的优先级进行调度,优先级高的任务先执行,优先级相同的情况下,可以采用FCFS作为辅助策略。
- 时间片轮转(RR):将时间分成若干个时间片,每个任务轮流占用一个时间片执行。时间片轮转算法可以提高系统的响应时间,适合于多用户交互式系统。
在设计调度策略时,我们还需要考虑抢占式调度和协作式调度的区别。抢占式调度允许操作系统在任何时候中断当前任务,转而执行更高优先级的任务。协作式调度则依赖于任务主动释放CPU,这可能导致低优先级任务长时间得不到执行。
## 2.2 实际操作中的任务调度策略
### 2.2.1 固定优先级调度(FPS)
固定优先级调度(FPS)是一种常见的实时任务调度策略。在这种策略中,每个任务被赋予一个固定优先级,这个优先级不会改变,直到任务完成。在大多数实时操作系统中,任务的优先级是根据任务的截止时间决定的,截止时间越早,优先级越高。
FPS策略的关键在于确定任务的优先级,这通常与任务的关键性(如何紧急)和截止时间紧密相关。在实现FPS策略时,可以采用不同的任务队列,一个队列对应一个优先级。操作系统在任务调度时,会首先检查最高优先级队列,如果存在任务,就立即执行。
固定优先级调度的优点是简单且易于理解,但其对任务的执行顺序有严格限制,可能导致高优先级任务饿死低优先级任务,即低优先级任务长时间得不到执行。
### 2.2.2 动态优先级调度
与固定优先级调度不同,动态优先级调度策略在任务执行过程中会动态调整任务的优先级。动态优先级调度的目标是避免固定优先级调度可能导致的饥饿问题,它通过在运行时提升或降低任务优先级来确保所有任务都能得到适当的关注。
动态优先级调度的一个典型例子是最早截止时间优先(EDF)调度算法。在这种算法中,任务的优先级是根据它们的截止时间动态变化的。截止时间越近的任务,其优先级越高。这样可以确保系统总是处理最紧迫的任务,从而提高系统的实时性能。
动态优先级调度虽然能有效避免饥饿问题,但其复杂性比固定优先级调度要高。实现动态优先级调度需要更多的运行时计算,以确定和更新任务的优先级。同时,动态优先级调度算法也需要考虑优先级反转问题,这是指高优先级任务因为等待低优先级任务占用的资源而被延迟执行的现象。
### 2.2.3 时间触发调度模型
时间触发调度模型是一种与传统的事件驱动调度完全不同的调度方法。在时间触发模型中,系统的行为由时间触发的事件决定,任务按照预定的时间表进行调度。这种调度模型广泛应用于对实时性要求极高的系统中,如汽车电子控制系统和航空航天领域。
时间触发调度模型的一个关键特性是它具有良好的可预测性。通过预先定义好任务的执行时间表,可以保证系统行为的确定性和可预测性,从而满足苛刻的实时性要求。然而,时间触发模型也有其缺点,如系统资源利用率低,对突发事件的响应不够灵活。
为了提高时间触发调度模型的灵活性,一些系统采用了混合调度方法,即结合时间触发和事件触发两种调度策略,以期达到最佳的性能和灵活性平衡。
## 2.3 高级任务调度技术
### 2.3.1 实时操作系统中的抢占式调度
在实时操作系统中,抢占式调度是一种重要的任务调度策略,它允许操作系统在任何时候中断当前任务,并转而执行更高优先级的任务。这种调度策略特别适用于那些对实时性要求很高的应用,如工业控制系统、航空电子系统和汽车电子系统。
抢占式调度的优点是它能够确保高优先级任务可以及时得到处理,满足严格的实时要求。为了实现抢占式调度,操作系统通常需要在任务状态发生改变时(例如,任务被阻塞、时间片用完或高优先级任务就绪)进行任务切换。任务切换涉及保存当前任务的状态并恢复下一任务的状态,这是抢占式调度的开销所在。
然而,抢占式调度并非没有缺点。如果频繁发生任务切换,系统可能会因为切换开销过大而影响整体性能。此外,抢占式调度可能导致低优先级任务饥饿,即长时间得不到执行机会。
### 2.3.2 任务调度中的优化和调试技巧
任务调度优化和调试是实时系统开发中的重要环节。开发者需要不断优化调度策略以达到最佳的系统性能,同时也要具备调试技巧,以便在系统出现问题时能够快速定位和解决。
- 优先级分配优化:合理分配任务优先级是优化调度的重要手段。通常可以通过静态分析或者模拟来确定任务的优先级。
- 任务划分和合并:将大任务分解为小任务或者将多个小任务合并为大任务,可以优化任务调度的效率。
- 任务执行时间估计:准确估计每个任务的执行时间是提高调度效率的关键。开发者需要考虑最坏情况执行时间(WCET),确保任务在规定的时间内完成。
- 优化调度算法:开发者可以尝试不同的调度算法,通过比较分析选择最适合当前应用的算法。
- 利用任务调度分析工具:市面上有多种工具可以帮助开发者分析任务调度性能,如Rate Monotonic Analyzer (RMA) 和 Stack Analyzer等。
调试任务调度时,开发者需要关注任务之间的同步和通信问题,比如避免优先级反转和死锁。一些现代调试器提供了性能分析工具和可视化界面,能够帮助开发者理解任务调度行为,并对系统性能进行评估。
通过这些优化和调试技术,可以有效提高任务调度的效率和实时操作系统的性能。
# 3. 内存管理原理与应用
在现代操作系统和嵌入式系统的设计中,内存管理是至关重要的部分。它不仅是运行多个程序、确保数据安全和系统稳定的基础,还关系到系统的性能优化。本章将深入探讨内存管理的概念、原理、应用以及如何诊断和解决内存管理过程中遇到的问题。
## 3.1 内存管理的概念和作用
### 3.1.1 内存管理的目标和要求
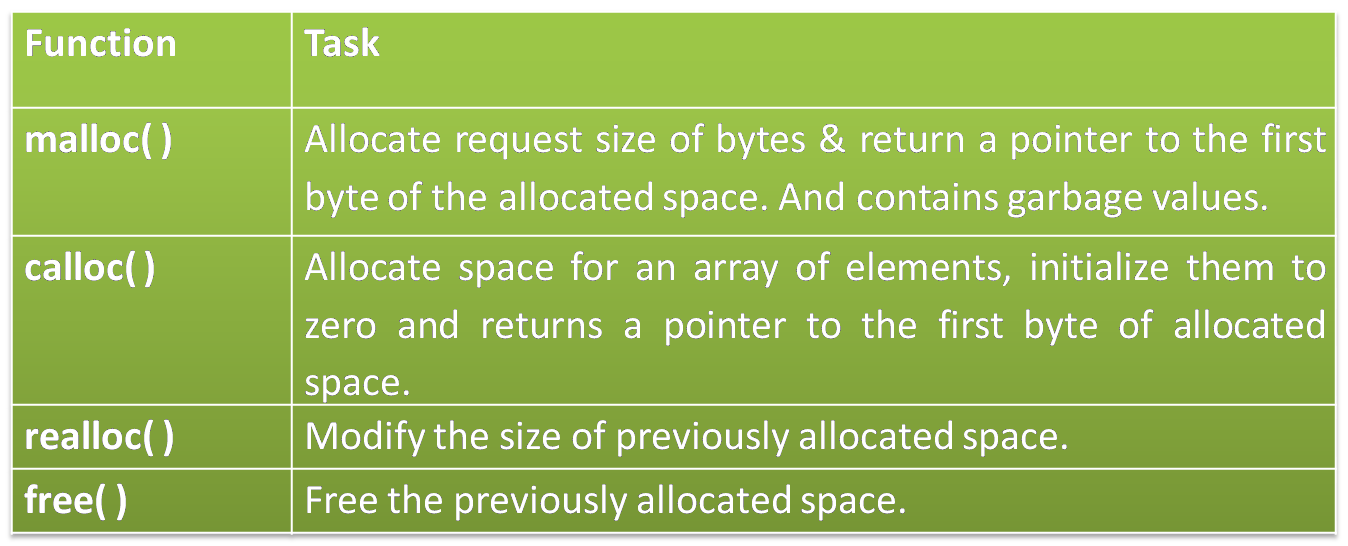
内存管理的主要目标是高效、公正地利用内存资源,同时保证系统的稳定性和安全性。内存管理要求在多个程序并发执行时,合理地分配和回收内存资源,避免内存泄漏,确保内存碎片最小化。内存管

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《ETAS AUTOSAR 用户手册.pdf》专栏为 AUTOSAR 技术的深入解析和实用指南提供了全面的资源。它涵盖了从入门基础知识到高级应用的广泛主题,包括架构、软件集成、诊断、操作系统、安全机制、功能安全合规性、车载以太网集成、与经典 AUTOSAR 的比较、模型驱动开发、系统测试自动化、持续集成实践、工具链搭建和版本管理。专栏中的文章由 ETAS 专家撰写,提供了深入的见解、最佳实践和案例研究,帮助读者掌握 AUTOSAR 技术的各个方面,从而优化汽车电子系统的开发和实施。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【信号质量与时序测试黄金法则】:专家揭秘硬件设计的核心技巧
# 摘要
随着电子硬件的复杂性日益增加,信号质量和时序测试在硬件设计和验证中扮演着关键角色。本文探讨了信号质量与时序测试的重要性,从理论到实践深入分析了信号完整性、时序分析与优化、信号完整性测试以及改进策略。文中详细介绍了硬件设计基础、时钟树合成、信号同步、自动化测试框架等关键技术,并通过实际案例强调了硬件测试与验证高级技
【SAP财务月结深度解析】:避开10个常见陷阱,掌握关键步骤

# 摘要
SAP财务月结是确保企业会计信息准确性和时效性的重要环节。本文首先概述了SAP财务月结的基本概念,随后详细探讨了月结前的各项准备工作,包括核对与调整日常会计分录、资产负债表的对账与平衡,以及期末计提和预提事项处理。第三章深入解析了SAP财务月结的关键步骤,涉及执行月结标准程序、财务报表生成与核对,以及异常事项
JQuery Ajax大数据传输秘籍:专家教你如何提升传输效率
# 摘要
JQuery Ajax技术为大数据传输提供了灵活高效的解决方案,然而在实际应用中面临着数据处理、传输效率、安全性及管理等方面挑战。本文详细探讨了JQuery Ajax在构建请求、数据序列化、服务器和客户端优化、错误处理以及安全措施等技术细节。通过分析实操案例,本文提出了服务器端优化策略,如数据压缩和缓存,以及客户端性能提升方法,如WebSocket技术的使用。此外,针对大数据传输中常见的并发问题,本
STM8L051F3P6编程实战:C语言开发者的必修课

# 摘要
本文详细介绍了STM8L051F3P6微控制器的开发与应用。首先概述了微控制器的基本情况,随后指导读者如何搭建开发环境和进行基础配置,包括安装开发工具、理解微控制器架构和配置时钟系统。深入探讨了STM8L051F3P6的编程模式,包括存储器映射、中断系统、低功耗模式以及编程节能策略。接着,本文详细阐述了微控制器外设编程,包括定时器、ADC/DAC转换器
FANUC机器人通信调试实战指南:5大技巧助你快速解决

# 摘要
随着工业自动化程度的不断提升,FANUC机器人在智能制造领域中的应用越来越广泛。有效的通信机制是确保机器人系统高效运行的关键。本文从基础概念开始,详细解读了FANUC机器人通信协议的构成和重要性,特别是RS-232、RS-485以及Ethernet/IP协议在机器人通信中的应用。随后,本文深入探讨了通信硬件的选择、接口配置、电缆和端口故障处理技巧。通信调试部分提供了实用的参数设
搜索引擎新战略:如何通过语义扩展查询优化结果

# 摘要
语义搜索技术近年来已成为搜索引擎优化的关键因素,其重要性体现在能够更好地理解用户查询的意图,并提供更精准的搜索结果。本文首先介绍了语义搜索的基础与重要性,随后深入探讨了语义扩展查询的理论基础,包括语义搜索的定义、传统搜索与语义搜索的区别、语义扩展技术和相关度评分方法。在实践
LOGIX 5000 vs. 传统PLC:新时代自动化解决方案的全面对比

# 摘要
本文旨在深入分析和比较LOGIX 5000与传统PLC的技术特点、开发效率、性能和稳定性,并探讨了各自在现代工业应用中的优势与局限性。通过对比LOGIX 5000的模块化设计、高级编程工具和传统PLC的经典控制逻辑,本文揭示了两种系统在编程复杂度、系统集成以及工业应用性能需求等方面的差异。此外,本文还提供了LOGIX 5000和传统PLC的实际应用案例,展望了自动化技术的未来趋势,包括新兴技
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )