YOLO神经网络游戏中的军事应用:模拟训练和作战推演
发布时间: 2024-08-17 11:04:28 阅读量: 75 订阅数: 21 

# 1. YOLO神经网络简介
YOLO(You Only Look Once)是一种单次卷积神经网络,用于实时目标检测。与传统的目标检测方法不同,YOLO将目标检测视为回归问题,一次性预测图像中所有目标的位置和类别。这种独特的方法使其能够以极高的速度和准确性检测对象。
YOLO网络通常由一个主干网络和一个检测头组成。主干网络负责提取图像的特征,而检测头负责预测边界框和目标类别。YOLOv3是YOLO家族中流行的版本,它采用了Darknet-53主干网络和一个带有残差连接的检测头。YOLOv3的实时检测速度可达每秒30帧,同时保持较高的检测精度。
# 2. YOLO神经网络在军事模拟训练中的应用
### 2.1 虚拟战场环境构建
#### 2.1.1 场景建模和数据采集
虚拟战场环境构建是军事模拟训练的基础,需要对战场场景进行逼真的建模,并采集大量训练数据。
**场景建模**
场景建模涉及地形、植被、建筑物等要素的创建。可以使用3D建模软件或激光扫描技术获取高精度模型。
**数据采集**
数据采集包括目标图像、传感器数据和环境信息。目标图像可以从无人机、卫星或合成数据集中获取。传感器数据包括雷达、激光雷达和红外数据。环境信息包括天气、时间和光照条件。
### 2.1.2 虚拟角色和行为模拟
虚拟角色和行为模拟是模拟训练中不可或缺的一部分。虚拟角色包括士兵、车辆和飞机,需要具有逼真的行为和交互能力。
**角色建模**
角色建模涉及角色的外观、运动和装备的创建。可以采用骨骼动画、物理引擎和人工智能技术来实现逼真的角色行为。
**行为模拟**
行为模拟涉及角色在不同场景中的决策和行动。可以使用基于规则的系统、有限状态机或强化学习算法来模拟角色的行为。
### 2.2 训练和评估
#### 2.2.1 数据集准备和模型训练
YOLO神经网络的训练需要准备一个包含目标图像、边界框和类标签的大型数据集。数据集可以从公开数据集或定制采集。
**数据集准备**
数据集准备包括图像预处理、数据增强和数据划分。图像预处理涉及调整图像大小、标准化和裁剪。数据增强可以提高模型的泛化能力,包括翻转、旋转和裁剪。数据划分将数据集分为训练集、验证集和测试集。
**模型训练**
YOLO模型的训练使用监督学习算法,如梯度下降和反向传播。训练过程涉及更新模型权重,以最小化目标函数(通常是交叉熵损失)。
#### 2.2.2 模型评估和性能优化
模型评估是训练过程中至关重要的步骤,用于评估模型的性能和识别改进领域。
**模型评估**
模型评估指标包括平均精度(mAP)、召回率和准确率。mAP是衡量模型检测准确性和召回率的综合指标。
**性能优化**
性能优化涉及调整模型超参数、使用正则化技术和探索不同的网络架构。超参数包括学习率、批次大小和正则化系数。正则化技术包括L1和L2正则化,有助于防止过拟合。
# 3. YOLO神经网络在作战推演中的应用
### 3.1 战场态势感知
#### 3.1.1 目标识别和跟踪
YOLO神经网络在作战推演中发挥着至关重要的作用,其强大的目标识别和跟踪能力为态势感知提供了坚实的基础。YOLO算法通过将目标检测任务转化为回归问题,同时预测目标的边界框和类别概率,实现了实时高效的目标识别。
```python
import cv2
import numpy as np
# 加载YOLO模型
net = cv2.dnn.readNet("yolov3.weights", "yolov3.cfg")
# 初始化视频流
cap = cv2.VideoCapture("video.mp4")
while True:
# 读取帧
ret, frame = cap.read()
if not ret:
break
# 预处理帧
blob = cv2.dnn.blobFromImage(frame, 1 / 255.0, (416, 416), (0, 0, 0), swapRB=True, crop=False)
# 将blob输入网络
net.setInput(blob)
# 前向传播
detections = net.forward()
# 后处理检测结果
for detection in detections[0, 0]:
score = detection[5]
if score > 0.5:
left, top, right, bottom = detection[0:4] * np.array([frame.shape[1], frame.shape[0], frame.shape[1], frame.shape[0]])
cv2.rectangle(frame, (int(left), int(top)), (int(right), int(bottom)), (0, 255, 0), 2)
# 显示帧
cv2.imshow("Frame", frame)
if cv2.waitKey(1) & 0xFF == ord("q"):
break
# 释放资源
cap.release()
cv2.destroyAllWindows()
```
**逻辑分析:**
1. 加载YOLO模型,为目标识别做准备。
2. 初始化视频流,读取视频帧。
3. 对帧进行预处理,将其转换为YOLO模型接受的格式。
4. 将预处理后的帧输入YOLO模型,进行前向传播。
5. 后处理检测结果,过滤置信度较低的检测结果。
6. 在帧上绘制检测

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 YOLO 神经网络游戏开发专栏!在这个专栏中,我们将深入探讨使用 YOLO 神经网络技术打造令人惊叹的游戏体验。从零开始构建你的游戏大作,探索性能优化技巧,提升帧率和流畅度。了解物体检测、目标跟踪、图像生成、物理模拟和声音合成的奥秘,打造栩栩如生的游戏世界。我们还将深入研究多人游戏、云计算、大数据分析、机器学习、虚拟现实、增强现实和游戏化,帮助你打造社交互动、扩展规模、优化体验和提升盈利能力的游戏。此外,我们还将探讨 YOLO 神经网络在教育、医疗和军事领域的应用,展示其在各种领域的强大潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
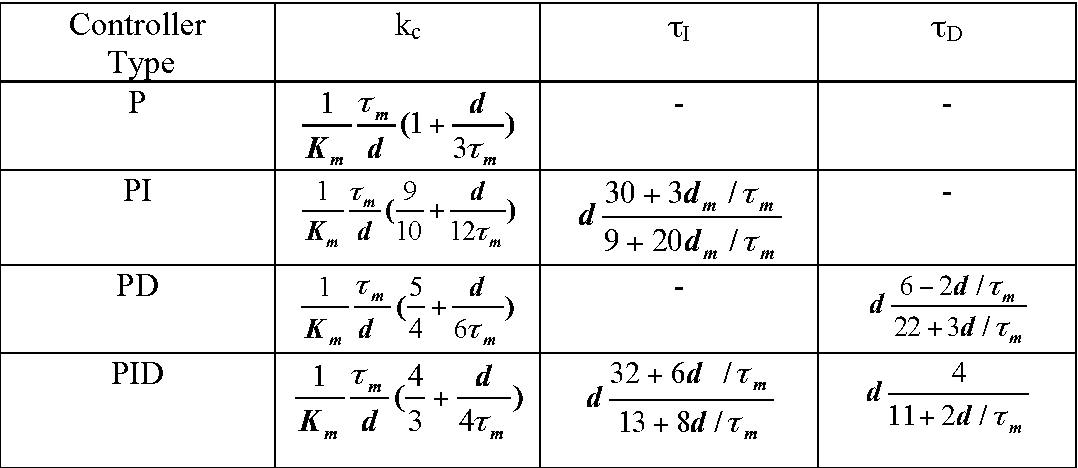
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
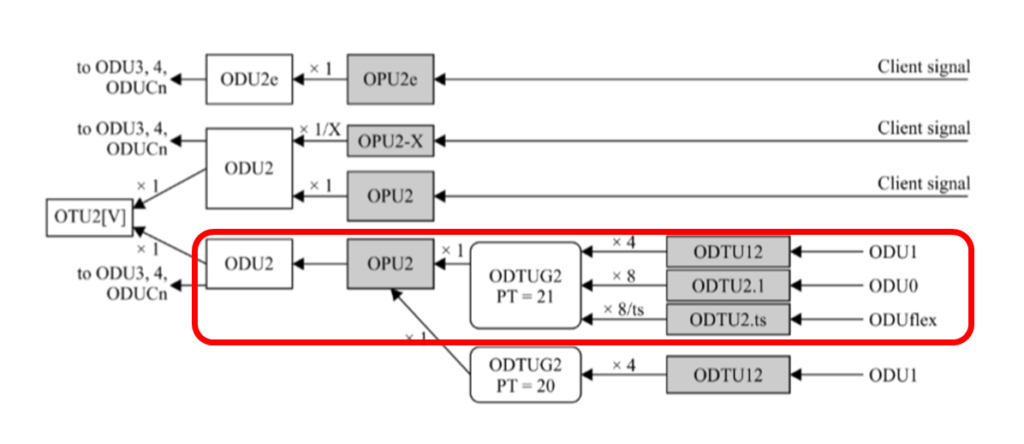
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
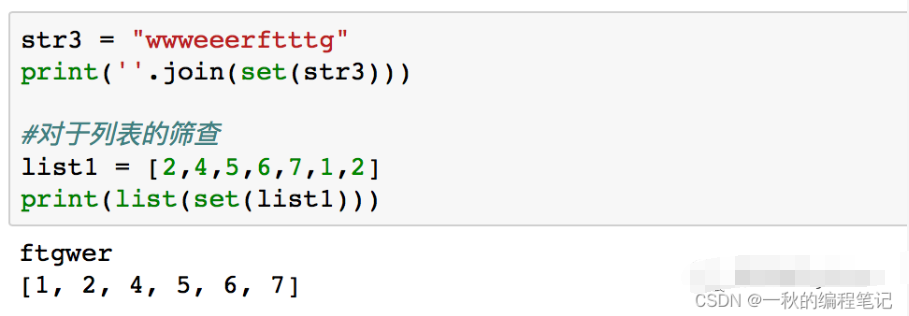
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )