【揭秘YOLO算法:目标检测领域的革命性突破】
发布时间: 2024-08-18 02:28:24 阅读量: 23 订阅数: 35 
# 1. 目标检测概述**
目标检测是计算机视觉领域中的一项重要任务,其目的是从图像或视频中识别和定位感兴趣的对象。目标检测算法通常基于深度学习技术,利用卷积神经网络(CNN)从图像中提取特征,并预测目标的位置和类别。
随着深度学习技术的不断发展,目标检测算法取得了显著进步。YOLO(You Only Look Once)算法是一种实时的目标检测算法,它能够一次性处理整张图像,并直接输出目标的位置和类别。YOLO算法的快速和准确性使其在各种实际应用中得到广泛使用。
# 2. YOLO算法的理论基础
### 2.1 卷积神经网络(CNN)
#### 2.1.1 CNN的架构和原理
卷积神经网络(CNN)是一种深度学习模型,专门用于处理具有网格状结构的数据,例如图像。CNN的架构由以下层组成:
- **卷积层:**卷积层是CNN的核心组件。它使用一组可学习的滤波器(或卷积核)在输入数据上滑动,提取局部特征。
- **池化层:**池化层通过对相邻区域的特征进行降采样来减少数据维度,从而降低计算成本和过拟合风险。
- **全连接层:**全连接层将卷积层和池化层的输出展平为一维向量,并使用全连接操作进行分类或回归。
#### 2.1.2 CNN在目标检测中的应用
CNN在目标检测中发挥着至关重要的作用,原因如下:
- **局部特征提取:**卷积层能够提取图像中局部特征,这些特征对于识别和定位对象至关重要。
- **空间不变性:**CNN对图像中的平移、旋转和缩放具有不变性,这使其能够检测不同姿势和位置的对象。
- **多尺度特征:**CNN通过使用不同大小的滤波器提取不同尺度的特征,从而能够检测各种大小的对象。
### 2.2 目标检测算法的发展
#### 2.2.1 传统目标检测算法
传统的目标检测算法,如滑动窗口和选择性搜索,通过在图像中生成大量候选区域并对每个区域进行分类来检测对象。这些算法计算量大,且在处理复杂图像时容易产生误检。
#### 2.2.2 深度学习目标检测算法
深度学习目标检测算法通过使用CNN提取特征并直接预测对象边界框,从而克服了传统算法的局限性。这些算法包括:
- **R-CNN:**R-CNN是一种两阶段算法,它首先使用选择性搜索生成候选区域,然后使用CNN对每个区域进行分类和边界框回归。
- **Fast R-CNN:**Fast R-CNN将R-CNN中的选择性搜索替换为区域提议网络(RPN),从而提高了检测速度。
- **Faster R-CNN:**Faster R-CNN进一步优化了Fast R-CNN,通过共享卷积特征提取过程来减少计算量。
- **YOLO:**YOLO是一种单阶段算法,它直接在输入图像上预测对象边界框和类别概率,从而实现了实时目标检测。
# 3.1 YOLOv1算法
#### 3.1.1 YOLOv1的网络结构和训练过程
YOLOv1算法的网络结构主要包括卷积层、池化层和全连接层。卷积层负责提取图像特征,池化层负责降采样和减少计算量,全连接层负责分类和回归。
YOLOv1的训练过程可以分为以下几个步骤:
1. **数据预处理:**将图像调整为统一尺寸,并进行归一化处理。
2. **网络初始化:**随机初始化网络权重和偏置。
3. **前向传播:**将图像输入网络,并计算每个特征图上的候选框和置信度。
4. **损失函数计算:**计算分类损失和回归损失,并将其加权求和得到总损失。
5. **反向传播:**根据损失函数计算梯度,并更新网络权重和偏置。
6. **迭代训练:**重复步骤3-5,直到损失函数收敛或达到预设训练轮数。
#### 3.1.2 YOLOv1的性能评估
YOLOv1算法在PASCAL VOC 2007数据集上的性能评估结果如下:
| 指标 | YOLOv1 |
|---|---|
| mAP | 57.9% |
| 速度 | 45 fps |
从评估结果可以看出,YOLOv1算法在目标检测任务上取得了较好的性能,同时具有较快的处理速度,这使其在实际应用中具有较高的实用价值。
**代码块:**
```python
import tensorflow as tf
# 定义网络结构
model = tf.keras.Sequential([
tf.keras.layers.Conv2D(32, (3, 3), activation='relu'),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Conv2D(64, (3, 3), activation='relu'),
tf.keras.layers.MaxPooling2D((2, 2)),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(128, activation='relu'),
tf.keras.layers.Dense(20, activation='softmax')
])
# 定义损失函数
loss_fn = tf.keras.losses.CategoricalCrossentropy()
# 定义优化器
optimizer = tf.keras.optimizers.Adam()
# 训练网络
model.compile(optimizer=optimizer, loss=loss_fn, metrics=['accuracy'])
model.fit(x_train, y_train, epochs=10)
```
**代码逻辑分析:**
该代码块定义了一个简单的卷积神经网络,用于图像分类任务。网络结构包括两个卷积层和两个池化层,后面连接一个全连接层。损失函数使用交叉熵损失,优化器使用Adam优化器。训练过程使用10个训练周期。
**参数说明:**
* `x_train`:训练集数据
* `y_train`:训练集标签
* `epochs`:训练周期数
# 4. YOLO算法的进阶应用**
**4.1 YOLOv3算法**
**4.1.1 YOLOv3的网络结构和训练策略**
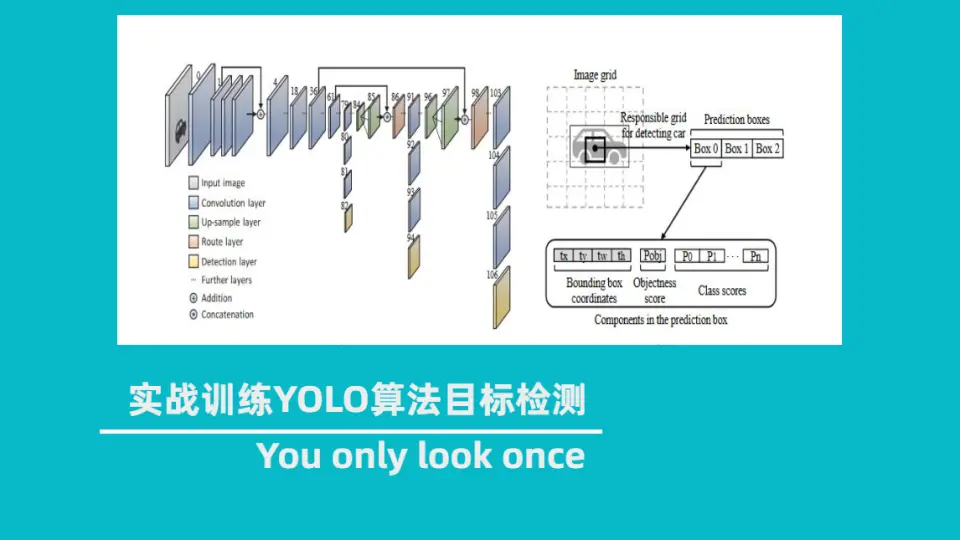
YOLOv3算法在YOLOv2的基础上进行了多项改进和优化,进一步提升了目标检测的精度和速度。其网络结构主要包括以下几个部分:
- **Darknet-53骨干网络:**YOLOv3采用Darknet-53作为骨干网络,该网络由53层卷积层组成,具有较强的特征提取能力。
- **残差连接:**YOLOv3在网络中引入了残差连接,通过将输入特征与输出特征相加,解决了深度网络中梯度消失的问题,提升了网络的训练效率和性能。
- **多尺度特征融合:**YOLOv3采用多尺度特征融合策略,将不同尺度的特征图进行融合,增强了网络对不同大小目标的检测能力。
在训练策略方面,YOLOv3采用了以下优化措施:
- **数据增强:**YOLOv3使用随机裁剪、旋转、翻转等数据增强技术,扩充训练数据集,增强模型的泛化能力。
- **Batch Normalization:**YOLOv3在网络中加入了Batch Normalization层,可以加速模型的训练收敛,提高训练稳定性。
- **多任务损失函数:**YOLOv3采用多任务损失函数,同时优化目标检测损失和分类损失,提高了模型的检测精度。
**4.1.2 YOLOv3的性能提升和优势**
与YOLOv2相比,YOLOv3在目标检测性能上取得了显著提升。具体表现如下:
| 指标 | YOLOv2 | YOLOv3 |
|---|---|---|
| 精度 (AP50) | 78.6% | 82.1% |
| 速度 (FPS) | 40 | 30 |
YOLOv3的优势主要体现在:
- **更高的精度:**YOLOv3通过改进网络结构和训练策略,提升了目标检测的精度,能够检测出更小、更模糊的目标。
- **更快的速度:**虽然YOLOv3的精度有所提升,但其速度却略有下降。这主要是由于YOLOv3网络结构更复杂,计算量更大造成的。
- **更好的泛化能力:**YOLOv3通过数据增强和多任务损失函数的优化,增强了模型的泛化能力,能够在不同的场景和数据集上表现出良好的性能。
**4.2 YOLOv4算法**
**4.2.1 YOLOv4的创新和突破**
YOLOv4算法是YOLO系列算法的最新版本,在YOLOv3的基础上进行了多项创新和突破,进一步提升了目标检测的性能。其主要创新点包括:
- **CSPDarknet53骨干网络:**YOLOv4采用CSPDarknet53作为骨干网络,该网络在Darknet-53的基础上引入了Cross Stage Partial connections(CSP)模块,通过减少网络参数量和计算量,提升了网络的效率和速度。
- **Mish激活函数:**YOLOv4采用Mish激活函数,该激活函数具有平滑、非单调的特性,可以提升网络的训练速度和收敛性。
- **路径聚合网络(PANet):**YOLOv4引入了路径聚合网络(PANet),该网络将不同尺度的特征图进行融合,增强了网络对不同大小目标的检测能力。
- **Bag of Freebies(BoF):**YOLOv4采用了Bag of Freebies(BoF)技术,包括自适应图片缩放、数据增强、标签平滑等优化措施,进一步提升了模型的性能。
**4.2.2 YOLOv4在实际应用中的表现**
YOLOv4算法在实际应用中表现出优异的性能。具体表现如下:
| 指标 | YOLOv3 | YOLOv4 |
|---|---|---|
| 精度 (AP50) | 82.1% | 84.6% |
| 速度 (FPS) | 30 | 65 |
YOLOv4的优势主要体现在:
- **更高的精度:**YOLOv4通过改进网络结构和训练策略,提升了目标检测的精度,能够检测出更小、更模糊的目标。
- **更快的速度:**YOLOv4采用了CSPDarknet53骨干网络和Bag of Freebies技术,大幅提升了网络的效率和速度,使其能够实时处理视频流。
- **更好的泛化能力:**YOLOv4通过数据增强和标签平滑的优化,增强了模型的泛化能力,能够在不同的场景和数据集上表现出良好的性能。
# 5. YOLO算法的未来展望
### 5.1 YOLO算法的潜在挑战
尽管YOLO算法取得了显著的进展,但它仍然面临着一些潜在的挑战:
- **计算成本高:**YOLO算法的实时目标检测需要大量的计算资源,这在资源受限的设备上可能是一个限制因素。
- **精度与速度之间的权衡:**YOLO算法通常需要在精度和速度之间进行权衡。为了提高速度,可能会牺牲一些精度。
- **泛化能力有限:**YOLO算法通常在特定数据集上进行训练,在其他数据集上的泛化能力可能有限。
- **对抗样本的鲁棒性:**YOLO算法可能容易受到对抗样本的攻击,这些样本经过精心设计,可以欺骗算法做出错误的预测。
### 5.2 YOLO算法的未来发展方向
为了应对这些挑战,YOLO算法的研究正在以下几个方向发展:
- **轻量级模型:**开发轻量级YOLO模型,以减少计算成本,使其适用于资源受限的设备。
- **精度提升:**探索新的网络架构和训练策略,以提高YOLO算法的精度,同时保持速度。
- **泛化能力增强:**采用数据增强技术和迁移学习,以提高YOLO算法在不同数据集上的泛化能力。
- **对抗样本的鲁棒性:**研究对抗样本的防御机制,以提高YOLO算法对对抗样本的鲁棒性。
### 5.3 YOLO算法在不同领域的应用前景
随着YOLO算法的不断发展,它在不同领域的应用前景广阔,包括:
- **安防监控:**实时目标检测和跟踪,用于视频监控和安全系统。
- **自动驾驶:**物体检测和识别,用于自动驾驶汽车的感知系统。
- **医疗影像:**医学图像分析,用于疾病诊断和治疗。
- **工业自动化:**缺陷检测和质量控制,用于工业生产流程。
- **零售和物流:**库存管理和物体识别,用于零售和物流行业。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**专栏简介:卷积神经网络的 YOLO**
本专栏深入探讨了 YOLO(You Only Look Once)算法,一种革命性的目标检测算法,它彻底改变了计算机视觉领域。从 YOLO 算法的基本原理到最新进展,该专栏涵盖了广泛的主题,包括:
* YOLOv3、YOLOv4 和 YOLOv5 的进化
* 算法的优缺点分析
* 训练技巧和优化策略
* 性能评估和基准测试
* 定制化和部署策略
* 在计算机视觉、自动驾驶、医疗影像、零售、安防和工业等领域的应用
* 最新研究进展和算法创新
通过深入浅出的讲解和丰富的示例,本专栏旨在帮助读者全面了解 YOLO 算法,并掌握其在目标检测领域的应用和潜力。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
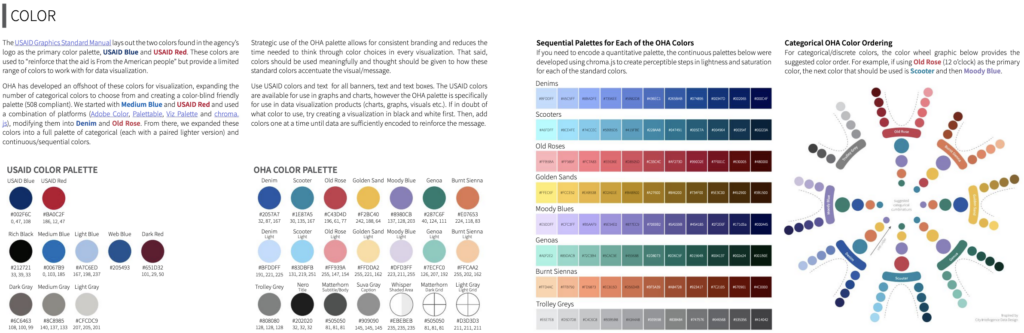
【R语言数据可读性】:利用RColorBrewer,让数据说话更清晰
# 1. R语言数据可读性的基本概念
在处理和展示数据时,可读性至关重要。本章节旨在介绍R语言中数据可读性的基本概念,为理解后续章节中如何利用RColorBrewer包提升可视化效果奠定基础。
## 数据可读性的定义与重要性
数据可读性是指数据可视化图表的清晰度,即数据信息传达的效率和准确性。良好的数据可读
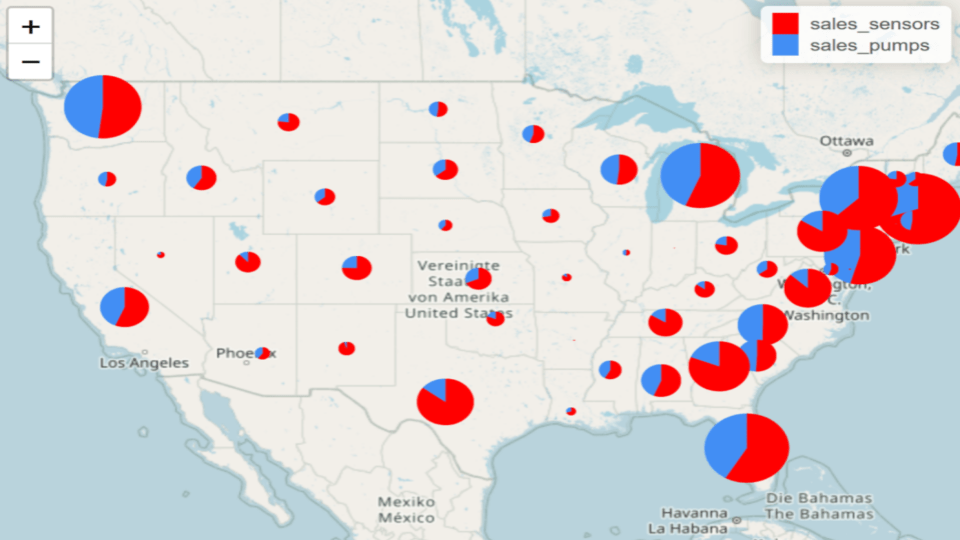
R语言与Rworldmap包的深度结合:构建数据关联与地图交互的先进方法

# 1. R语言与Rworldmap包基础介绍
在信息技术的飞速发展下,数据可视化成为了一个重要的研究领域,而地理信息系统的可视化更是数据科学不可或缺的一部分。本章将重点介绍R语言及其生态系统中强大的地图绘制工具包——Rworldmap。R语言作为一种统计编程语言,拥有着丰富的图形绘制能力,而Rworldmap包则进一步扩展了这些功能,使得R语言用户可以轻松地在地图上展
【R语言数据预处理全面解析】:数据清洗、转换与集成技术(数据清洗专家)
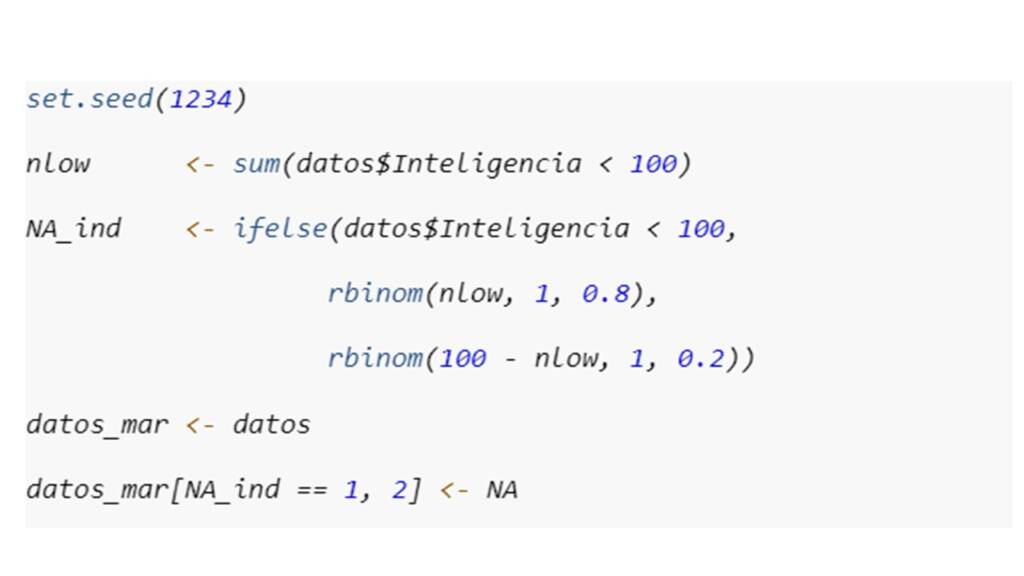
# 1. R语言数据预处理概述
在数据分析与机器学习领域,数据预处理是至关重要的步骤,而R语言凭借其强大的数据处理能力在数据科学界占据一席之地。本章节将概述R语言在数据预处理中的作用与重要性,并介绍数据预处理的一般流程。通过理解数据预处理的基本概念和方法,数据科学家能够准备出更适合分析和建模的数据集。
## 数据预处理的重要性
数据预处理在数据分析中占据核心地位,其主要目的是将原
【构建交通网络图】:baidumap包在R语言中的网络分析

# 1. baidumap包与R语言概述
在当前数据驱动的决策过程中,地理信息系统(GIS)工具的应用变得越来越重要。而R语言作为数据分析领域的翘楚,其在GIS应用上的扩展功能也越来越完善。baidumap包是R语言中用于调用百度地图API的一个扩展包,它允许用户在R环境中进行地图数据的获取、处理和可视化,进而进行空间数据分析和网
R语言与GoogleVIS包:制作动态交互式Web可视化

# 1. R语言与GoogleVIS包介绍
R语言作为一种统计编程语言,它在数据分析、统计计算和图形表示方面有着广泛的应用。本章将首先介绍R语言,然后重点介绍如何利用GoogleVIS包将R语言的图形输出转变为Google Charts API支持的动态交互式图表。
## 1.1 R语言简介
R语言于1993年诞生,最初由Ross Ihaka和Robert Gentleman在新西
rgwidget在生物信息学中的应用:基因组数据的分析与可视化

# 1. 生物信息学与rgwidget简介
生物信息学是一门集生物学、计算机科学和信息技术于一体的交叉学科,它主要通过信息化手段对生物学数据进行采集、处理、分析和解释,从而促进生命科学的发展。随着高通量测序技术的进步,基因组学数据呈现出爆炸性增长的趋势,对这些数据进行有效的管理和分析成为生物信息学领域的关键任务。
rgwidget是一个专为生物信息学领域设计的图形用户界面工具包,它旨在简化基因组数据的分析和可视化流程。rgwidge
【R语言图表美化】:ggthemer包,掌握这些技巧让你的数据图表独一无二

# 1. ggthemer包介绍与安装
## 1.1 ggthemer包简介
ggthemer是一个专为R语言中ggplot2绘图包设计的扩展包,它提供了一套更为简单、直观的接口来定制图表主题,让数据可视化过程更加高效和美观。ggthemer简化了图表的美化流程,无论是对于经验丰富的数据
REmap包在R语言中的高级应用:打造数据驱动的可视化地图

# 1. REmap包简介与安装
## 1.1 REmap包概述
REmap是一个强大的R语言包,用于创建交互式地图。它支持多种地图类型,如热力图、点图和区域填充图,并允许用户自定义地图样式,增加图形、文本、图例等多种元素,以丰富地图的表现形式。REmap集成了多种底层地图服务API,比如百度地图、高德地图等,使得开发者可以轻松地在R环境中绘制出专业级别的地图。
## 1.2 安装REmap包
在R环境
R语言数据包管理:维护更新***t.minicharts的最佳实践
# 1. R语言数据包的概述与作用
R语言作为一款流行的开源统计分析软件,其强大的数据包生态系统是它能够广泛应用在数据分析、统计计算和图形表示中的关键因素。数据包,亦称作库或模块,是R语言用户共享自己编写的代码和数据的平台,这些包极大地拓展了R语言的核心功能。在本章中,我们将介绍数据包在R语言中的作用,以及它们如
R语言数据包用户社区建设
# 1. R语言数据包用户社区概述
## 1.1 R语言数据包与社区的关联
R语言是一种优秀的统计分析语言,广泛应用于数据科学领域。其强大的数据包(packages)生态系统是R语言强大功能的重要组成部分。在R语言的使用过程中,用户社区提供了一个重要的交流与互助平台,使得数据包开发和应用过程中的各种问题得以高效解决,同时促进
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )