【深入解析STM32 HAL】:揭秘HAL库核心组件,专家级工作原理透析
发布时间: 2025-01-07 08:04:17 阅读量: 10 订阅数: 14 

STM32 HAL库 DHT11驱动
# 摘要
本文详细探讨了STM32 HAL库的架构、编程实践以及高级功能,为开发者提供了深入理解STM32微控制器硬件抽象层的方法。文章首先概述了HAL库的组成,接着详细分析了其核心组件、硬件交互方式和中间件扩展,并探讨了GPIO操作、定时器应用和通信接口配置等编程实践。高级功能部分重点介绍了DMA应用、模拟功能、ADC和DAC转换,以及安全特性和故障注入测试。此外,本文还提供了系统优化的策略,包括代码优化、能耗管理和系统可靠性提升,并通过具体项目案例,分析了HAL库在实际应用中的效果。最后,文章展望了STM32 HAL库未来的发展方向,以及在不断变化的行业趋势中的适应性。
# 关键字
STM32 HAL库;硬件抽象层;编程实践;系统优化;安全特性;故障注入测试;实时操作系统集成
参考资源链接:[STM32 HAL库实战:串口DMA+乒乓缓存+空闲中断,高效处理2M波特率通信](https://wenku.csdn.net/doc/40b88s9zi0?spm=1055.2635.3001.10343)
# 1. STM32 HAL库概述
## 简介
STM32微控制器拥有丰富的硬件资源和强大的处理能力,其HAL库是ST官方提供的硬件抽象层库。HAL库通过标准化的API接口简化硬件操作,从而使得开发者可以更专注于应用层的开发。
## HAL库的优点
STM32 HAL库提供了一种简洁、高效且易于理解的编程方式。它不仅支持广泛的STM32系列微控制器,还具有良好的可移植性和可维护性。HAL库的设计考虑到了代码的可复用性,让开发者能在不同的项目中重复使用已有的代码块。
## 应用场景
该库广泛应用于工业控制、消费电子、医疗设备和物联网等领域,适用于对实时性、稳定性和低功耗有较高要求的场景。使用HAL库进行开发,可以加快产品上市时间,同时减少因硬件操作不当带来的风险。
通过本章的学习,读者将对STM32 HAL库有一个全面的认识,并了解到它在现代嵌入式开发中的重要性。后续章节将深入分析HAL库的架构及其高级应用。
# 2. 深入理解STM32 HAL库架构
### 2.1 STM32 HAL库核心组件解析
#### 2.1.1 HAL层的初始化流程
STM32 HAL库通过抽象层次的方式简化了硬件的访问。HAL层的初始化流程是任何STM32 HAL库应用的起点,它负责完成一系列的硬件设置,包括时钟配置、GPIO初始化、外设启动等。
在`HAL_Init()`函数中,库会进行内存重映射和默认时钟源的配置。之后,系统时钟配置函数`SystemClock_Config()`被调用,为MCU提供必要的时钟设置。以下是`SystemClock_Config()`函数的示例代码:
```c
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/* Initializes the CPU, AHB and APB busses clocks */
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLLMUL_16;
HAL_RCC_OscConfig(&RCC_OscInitStruct);
/* Initializes the CPU, AHB and APB busses clocks */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2);
}
```
通过这段代码,我们定义了外部高速时钟(HSE)作为PLL(相位锁定环)的时钟源,配置了PLL的倍频器,以提供所需的主时钟频率。这个函数是系统时钟初始化的关键,必须仔细配置,确保硬件的正确运行。
初始化过程中,`HAL_Init()`函数还会初始化HAL库的队列和回调函数。通过执行这些初始化步骤,HAL库为底层硬件操作建立了基础。
#### 2.1.2 中断和异常处理机制
中断和异常处理是STM32 HAL库的重要组成部分,它允许软件响应硬件事件,如按钮按下、定时器溢出等。在HAL库中,中断被配置为进入一个特定的中断服务例程(ISR),并在该例程中执行用户定义的代码。
处理中断时,需要关注中断优先级,确保关键中断得到及时处理。在STM32中,中断优先级由两部分组成:抢占优先级和子优先级。抢占优先级决定了当多个中断同时发生时哪个中断先被服务,子优先级则用于同级中断间的顺序选择。
HAL库通过`HAL_NVIC_SetPriority()`函数允许我们配置特定中断的优先级。例如,配置定时器中断优先级的代码如下:
```c
HAL_NVIC_SetPriority(TIM3_IRQn, 1, 0); // 设置定时器3中断优先级
HAL_NVIC_EnableIRQ(TIM3_IRQn); // 启用定时器3中断
```
在定时器3中断服务例程中,我们可以添加如下代码:
```c
void TIM3_IRQHandler(void)
{
HAL_TIM_IRQHandler(&htim3);
}
```
这个函数将调用由`HAL_TIM_IRQHandler()`处理的中断,该处理程序根据中断源执行相应的回调函数。
需要注意的是,在处理中断时,应该尽量减少ISR中的处理时间,避免影响系统的实时性。在处理复杂任务时,可以使用标志位或DMA(直接内存访问)来降低中断服务例程的负担。
### 2.2 HAL库与底层硬件的交互
#### 2.2.1 寄存器映射和访问方式
为了实现对硬件的精确控制,STM32 HAL库提供了寄存器映射的方法,允许开发者直接通过定义好的结构体来访问硬件寄存器。这种方法的优点是执行效率高,缺点是编写复杂度相对较大。
例如,若要配置GPIO端口为输出模式,可以使用如下代码:
```c
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE(); // 启用GPIOA时钟
GPIO_InitStruct.Pin = GPIO_PIN_1; // 配置GPIOA的第1号引脚
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 设置为推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 设置IO速度
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化GPIOA
```
此代码段通过`HAL_GPIO_Init()`函数初始化了GPIOA的第1号引脚。这种方法的优点是编写的代码能够紧密地贴合硬件,使得开发者能够完全控制硬件行为。缺点是需要对硬件规格书有足够的理解,特别是在配置复杂外设时。
#### 2.2.2 低功耗管理的实现原理
STM32设备在需要低功耗运行时,通常会使用低功耗模式。在HAL库中,低功耗管理通过一系列的函数来实现,这些函数会配置MCU进入睡眠、停止或待机模式,以降低能耗。
实现低功耗管理的关键在于正确配置电源控制寄存器(PWR)。下面是一个将设备置于睡眠模式的示例:
```c
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
```
其中,`PWR_MAINREGULATOR_ON`指定了使用主调节器,而`PWR_SLEEPENTRY_WFI`定义了睡眠进入方式为等待中断(Wait For Interrupt)。这种方式下,当发生可屏蔽中断时,处理器会被唤醒,从而允许设备在低功耗和响应外部事件之间取得平衡。
HAL库还提供了延时和唤醒时间管理,通过`HAL_PWR_EnterSLEEPMode()`函数和`HAL_PWR_GetWakeupCounterValue()`函数,开发者可以知道设备在睡眠模式下停留了多久,从而更好地控制功耗。
### 2.3 HAL库的中间件扩展
#### 2.3.1 中间件组件的结构和功能
STM32 HAL库中间件是构建在HAL库之上的软件包,它们提供了额外的、抽象的功能层,使得开发人员能够更快速地实现特定功能。这些中间件通常包括USB Device、File System、Touch Sensing等。
每个中间件都有自己的初始化函数,例如,如果要初始化USB设备中间件,可能会使用类似这样的函数:
```c
MX_USB_DEVICE_Init();
```
该函数会负责设置USB硬件、配置必要的时钟、初始化USB设备堆栈等任务。中间件的使用可以极大降低开发难度,缩短产品上市时间,但其缺点在于可能会增加系统的资源消耗和内存占用。
#### 2.3.2 实时操作系统(RTOS)与HAL的集成
许多嵌入式项目需要使用实时操作系统(RTOS),STM32 HAL库与RTOS的集成主要通过任务和中断服务例程来实现。在集成时,开发者需要选择一个合适的RTOS,并根据该RTOS的要求进行相应的配置。
例如,使用FreeRTOS与HAL库结合时,我们可能需要创建任务来处理用户输入,以及定时器中断来触发任务切换。以下是一个简单的FreeRTOS任务创建示例:
```c
void vTaskFunction(void *pvParameters)
{
for(;;)
{
// 执行任务代码
}
}
int main(void)
{
HAL_Init(); // 初始化HAL库
SystemClock_Config(); // 配置系统时钟
MX_GPIO_Init(); // 初始化GPIO
MX_USB_DEVICE_Init(); // 初始化USB设备中间件
xTaskCreate(vTaskFunction, "Task", 128, NULL, 1, NULL);
vTaskStartScheduler(); // 启动RTOS调度器
while(1)
{
// 如果调度器启动失败,则在这里执行代码
}
}
```
在这个例子中,`vTaskFunction`定义了任务的行为,`xTaskCreate`创建了一个任务实例,`vTaskStartScheduler`则启动了RTOS的调度器。这样,系统就可以在多个任务之间进行时间分片,实现并行处理。
在集成RTOS时,通常需要考虑到任务优先级的配置,以及如何高效地处理中断与任务间的通信。HAL库通过提供抽象层,简化了这一过程,使得开发者能够更专注于应用逻辑的实现。
通过本章节的介绍,深入理解了STM32 HAL库的架构和核心组件,了解到如何通过寄存器映射与中断和异常处理机制,以及中间件扩展和RTOS集成来实现更加复杂和高级的应用。下一章节将关注如何通过STM32 HAL库进行编程实践,包括对GPIO、定时器和通信接口的应用。
# 3. STM32 HAL库编程实践
## 3.1 HAL库中的GPIO操作
### 3.1.1 GPIO的基本配置和使用
GPIO(General Purpose Input/Output)是微控制器最基本的输入输出接口,STM32的GPIO可以配置为输入模式、输出模式、模拟输入模式、复用功能模式等。在使用STM32 HAL库进行GPIO编程时,首先需要通过HAL_GPIO_Init函数来初始化GPIO端口。该函数需要一个GPIO_InitTypeDef结构体类型的参数,用于指定端口的工作模式等属性。
```c
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 配置GPIO端口和引脚为推挽输出模式,最大输出速度为50MHz
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
```
上述代码初始化了GPIOA的第0号引脚为推挽输出模式。HAL库中的GPIO配置还包括了上拉、下拉、开漏输出、复用推挽、复用开漏、模拟输入等模式。用户可以根据自己的需要来配置不同的模式。初始化完成后,就可以通过HAL_GPIO_WritePin和HAL_GPIO_ReadPin这两个函数来控制GPIO引脚的高低电平输出和读取其电平状态。
### 3.1.2 复用功能和高级控制
除了基本的输入输出之外,STM32的GPIO还可以配置为复用功能,比如作为通信协议接口(如UART、I2C、SPI)的引脚,或者作为ADC(模数转换器)的输入引脚等。使用HAL库时,复用功能同样需要配置特定的引脚模式和参数。
```c
// 将GPIOB的第10号引脚配置为USART2_TX的功能
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_10;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
```
除了复用功能,STM32的GPIO还有一些高级特性,比如中断。当一个引脚配置为输入模式并使能中断后,当该引脚的电平发生变化时,可以触发中断服务程序。这对于需要对输入信号及时响应的应用非常有用。
## 3.2 HAL库的定时器应用
### 3.2.1 定时器的初始化和配置
STM32的HAL库提供了对定时器的广泛支持,包括基本定时器、通用定时器、高级控制定时器等。定时器的初始化和配置同样是通过初始化函数和配置结构体来完成。
```c
TIM_HandleTypeDef htim1;
// 初始化定时器
htim1.Instance = TIM1;
htim1.Init.Prescaler = (uint32_t)(SystemCoreClock / 1000000) - 1;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 1000 - 1;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
HAL_TIM_Base_Init(&htim1);
```
上述代码初始化了定时器TIM1,预分频器设置为1MHz,计数器为1000,意味着定时器的计数频率是1kHz,即每1毫秒计数器加1。
### 3.2.2 定时器中断和PWM输出
定时器的另一个重要功能是产生中断。通过定时器中断,可以周期性地执行特定的代码,这对于定时任务的执行非常有用。此外,定时器还常用于产生PWM(脉冲宽度调制)信号,用于电机控制、LED调光等场合。
```c
// 使能定时器的更新事件中断,并在中断服务函数中处理定时器溢出
HAL_TIM_Base_Start_IT(&htim1);
// 配置定时器的PWM输出模式
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, 500);
```
在上述代码中,首先使能了定时器TIM1的中断,然后通过`__HAL_TIM_SET_COMPARE`函数设置了TIM1通道1的比较值。这样就可以产生一个周期为1ms,占空比为50%的PWM信号。
## 3.3 HAL库的通信接口应用
### 3.3.1 UART、I2C、SPI接口的配置与通信
STM32 HAL库提供了对UART、I2C、SPI等通信接口的完整支持。这些接口的初始化和配置同样需要相应的初始化函数和结构体参数。
```c
UART_HandleTypeDef huart2;
// 初始化UART接口
huart2.Instance = USART2;
huart2.Init.BaudRate = 9600;
huart2.Init.WordLength = UART_WORDLENGTH_8B;
huart2.Init.StopBits = UART_STOPBITS_1;
huart2.Init.Parity = UART_PARITY_NONE;
huart2.Init.Mode = UART_MODE_TX_RX;
huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart2.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart2);
```
在上述代码中,初始化了UART接口,波特率设为9600bps,8位数据长度,1个停止位,无奇偶校验位。接下来,就可以使用HAL_UART_Transmit和HAL_UART_Receive等函数进行数据的发送和接收。
### 3.3.2 通信协议和数据处理
在使用各种通信协议时,往往需要对数据进行格式化处理,以保证数据的正确性和完整性。例如,当通过UART发送数据时,通常需要在数据前后加上起始位和停止位,如果是异步通信还需要计算校验位等。在接收数据时,需要识别起始位,根据帧格式提取数据,计算校验和等。
```c
uint8_t txData[] = "Hello, STM32 HAL!";
uint8_t rxData[100];
// 发送数据
HAL_UART_Transmit(&huart2, txData, sizeof(txData), HAL_MAX_DELAY);
// 接收数据
HAL_UART_Receive(&huart2, rxData, sizeof(rxData), HAL_MAX_DELAY);
```
在数据处理方面,还需要注意异步通信的同步问题,确保在正确的时刻处理数据,避免由于通信速率不匹配导致的数据丢失或者处理错误。
以上是STM32 HAL库编程实践中的GPIO操作和定时器应用以及通信接口应用的基本介绍。通过具体的代码示例和逻辑分析,读者应该能够更好地理解如何使用STM32 HAL库进行这些基本操作。后续章节将会进一步探讨如何利用HAL库实现更高级的功能和优化。
# 4. STM32 HAL库高级功能探究
## 4.1 DMA在HAL库中的应用
### 4.1.1 DMA的基本概念和工作流程
直接内存访问(DMA)是一种允许硬件子系统直接读写系统内存的技术,而无需处理器介入,从而极大地提高了数据吞吐率。在STM32 HAL库中,DMA被广泛应用以提升性能,尤其是在数据采集和传输密集型的应用中。
DMA工作流程大致可分为以下几个步骤:
1. **DMA请求产生**:通常来自于外设(如ADC、DAC、SPI、I2C、UART等),当外设需要发送或接收数据时,会向DMA控制器发出请求。
2. **DMA请求授权**:DMA控制器接收到请求后,会检查CPU当前的状态。如果CPU不忙,DMA控制器便会授权此请求。
3. **数据传输**:得到授权后,DMA控制器将控制总线,直接在指定的外设和内存之间传输数据,无需CPU干预。
4. **传输完成中断**:数据传输完成后,DMA控制器会发送一个中断信号给CPU,通知CPU传输已经完成。CPU此时可以执行其他任务,或者根据需要进行后续处理。
```c
// 示例:初始化DMA控制器和配置DMA传输
/* Enable DMA clock */
__HAL_RCC_DMAx_CLK_ENABLE();
/* Configure the DMA handler for peripheral */
hdma.Instance = DMAx_STREAMx;
hdma.Init.Channel = DMA_CHANNEL_0; // 根据实际硬件需求选择通道
hdma.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma.Init.PeriphInc = DMA_PINC_DISABLE;
hdma.Init.MemInc = DMA_MINC_ENABLE;
hdma.Init.PeriphDataAlignment = DMA_PDATAALIGN_WORD;
hdma.Init.MemDataAlignment = DMA_MDATAALIGN_WORD;
hdma.Init.Mode = DMA_NORMAL;
hdma.Init.Priority = DMA_PRIORITY_HIGH;
hdma.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma) != HAL_OK)
{
// 初始化失败处理逻辑
}
/* Associate the initialized DMA handle to the the UART handle */
__HAL_LINKDMA(&huart, hdmarx, hdma);
/* 然后,在合适的时机启动DMA传输,例如:
* HAL_UART_Receive_DMA(&huart, dataBuffer, bufferSize);
*/
```
### 4.1.2 高效数据传输和内存管理
在使用DMA进行高效数据传输时,合理管理内存尤其关键。以下是一些关键点:
1. **内存对齐**:确保数据缓冲区正确对齐,以匹配DMA控制器的要求。如上代码中,我们设置了`DMA_PDATAALIGN_WORD`和`DMA_MDATAALIGN_WORD`来表示数据宽度为32位。
2. **内存释放**:在数据传输完成后,及时释放已分配的DMA通道和内存,避免资源泄露。
3. **循环缓冲**:在处理大量数据时,使用循环缓冲可以减少中断服务例程(ISR)的执行次数,提高处理效率。
4. **优先级设置**:合理设置DMA传输的优先级,确保高优先级的任务(如关键数据传输)能够获得更多的处理机会。
```c
// 示例:启动DMA传输,并在完成时调用回调函数处理数据
HAL_UART_Receive_DMA(&huart, dataBuffer, bufferSize);
// 在DMA传输完成时,ISR会被调用
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart->Instance == USARTx)
{
// DMA传输完成后的处理逻辑
}
}
```
DMA的使用大大减轻了CPU的负担,允许它专注于其他计算密集型任务,同时在需要时通过中断来处理数据,从而实现更高效和响应更快的系统设计。
## 4.2 高级模拟功能和ADC转换
### 4.2.1 ADC转换的原理和配置
模拟数字转换器(ADC)是微控制器中一个非常重要的组件,它负责将模拟信号转换为数字信号,以便数字处理器能够处理。STM32 HAL库中提供了丰富的API来配置和控制ADC,支持多种转换模式、分辨率和采样时间。
ADC的配置和使用流程包括以下几个步骤:
1. **ADC初始化**:根据应用需求配置ADC参数,如分辨率、对齐方式、连续转换模式等。
2. **通道配置**:选择和配置要转换的模拟通道,包括通道的采样时间和顺序。
3. **触发器配置**:设置触发器源,可以是软件触发或硬件触发(如定时器触发、外部事件触发等)。
4. **启动转换**:启动ADC转换,等待转换完成或通过中断处理转换结果。
5. **数据读取**:从ADC数据寄存器中读取转换结果。
```c
// 示例:ADC初始化和启动
/* ADC初始化结构体设置 */
ADC_ChannelConfTypeDef sConfig = {0};
/* 使能ADC时钟 */
__HAL_RCC_ADCx_CLK_ENABLE();
/* ADC初始化 */
hadc.Instance = ADCx;
hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc.Init.Resolution = ADC_RESOLUTION_12B;
hadc.Init.ScanConvMode = DISABLE;
hadc.Init.ContinuousConvMode = DISABLE;
hadc.Init.DiscontinuousConvMode = DISABLE;
hadc.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc.Init.NbrOfConversion = 1;
hadc.Init.DMAContinuousRequests = DISABLE;
hadc.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc) != HAL_OK)
{
// 初始化失败处理逻辑
}
/* 配置ADC通道 */
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc, &sConfig) != HAL_OK)
{
// 通道配置失败处理逻辑
}
/* 启动ADC转换 */
HAL_ADC_Start(&hadc);
/* 读取ADC转换结果 */
uint32_t adcValue = HAL_ADC_GetValue(&hadc);
```
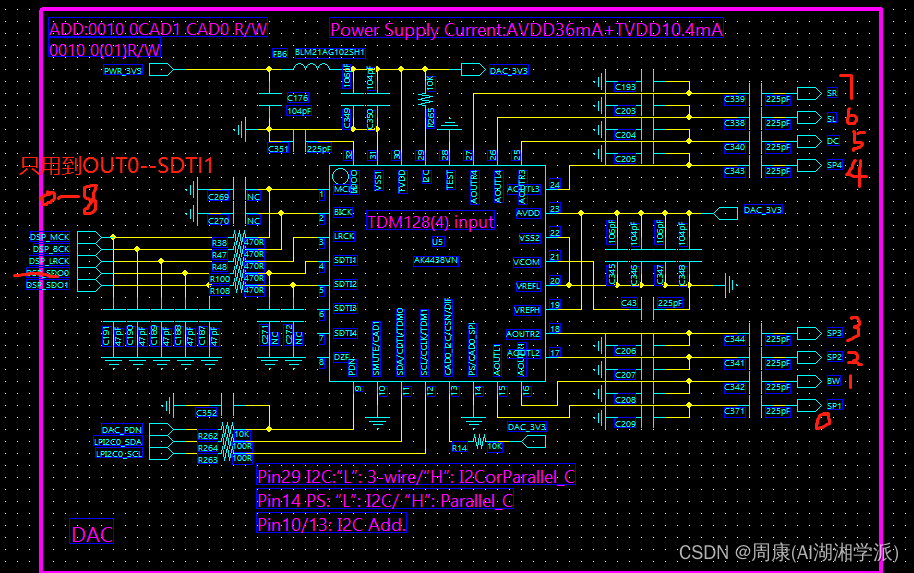
### 4.2.2 DAC输出及应用
数字模拟转换器(DAC)能够将数字信号转换为模拟信号,通常用于生成可变的模拟电压,例如音频信号、控制信号等。STM32 HAL库同样提供了丰富的DAC控制API,方便用户配置和使用DAC。
DAC配置和使用的基本步骤如下:
1. **DAC初始化**:初始化DAC通道和相关参数,如输出缓冲、波形触发等。
2. **设置输出值**:写入数字值到DAC数据寄存器,生成对应的模拟电压输出。
3. **触发和中断**:配置触发源(软件触发或硬件触发)及中断处理。
4. **数据输出**:启动DAC输出,连续输出或单次输出模式可选。
```c
// 示例:DAC初始化和数据输出
/* DAC初始化结构体设置 */
DAC_ChannelConfTypeDef sConfig = {0};
/* 使能DAC时钟 */
__HAL_RCC_DACx_CLK_ENABLE();
/* DAC初始化 */
hdac.Instance = DACx;
if (HAL_DAC_Init(&hdac) != HAL_OK)
{
// 初始化失败处理逻辑
}
/* 配置DAC通道 */
sConfig.DAC_Trigger = DAC_TRIGGER_NONE;
sConfig.DAC_OutputBuffer = DAC_OUTPUTBUFFER_ENABLE;
if (HAL_DAC_ConfigChannel(&hdac, &sConfig, DAC_CHANNEL_1) != HAL_OK)
{
// 通道配置失败处理逻辑
}
/* 设置DAC输出值 */
uint32_t dacValue = 2048; // 例如,对于12位DAC,这是中间值
HAL_DAC_SetValue(&hdac, DAC_CHANNEL_1, DAC_ALIGN_12B_R, dacValue);
/* 启动DAC输出 */
HAL_DAC_Start(&hdac);
/* 持续输出或在需要时停止输出 */
// HAL_DAC_Stop(&hdac);
```
DAC能够用于生成各种信号,如模拟音调、基准电压等。合理利用DAC的特性,可以使系统设计更加灵活多样。
## 4.3 安全特性和故障注入
### 4.3.1 安全特性的概述和实现
在嵌入式系统设计中,安全特性非常重要,尤其是在如医疗、汽车电子等领域。STM32微控制器通过HAL库提供了诸如内存保护单元(MPU)、写保护(WPR)、闪存擦写保护(FWP)等安全特性,增强系统的安全等级。
### 4.3.2 故障注入测试和系统鲁棒性
故障注入测试是评估系统鲁棒性的重要手段。通过故意模拟错误或异常条件,例如内存访问违规、电源电压波动、时钟频率变化等,来测试系统对异常情况的响应能力和恢复能力。
STM32提供了一种特殊的硬件故障注入模块(HFI),允许开发者注入各类硬件故障。此外,HAL库还提供了相应的软件故障注入接口,使得开发者可以在软件层面模拟这些情况。
```c
// 示例:写保护(WPR)的使用,防止误写Flash存储
HAL_FLASH_Unlock();
FLASH_EraseInitTypeDef eraseInitStruct;
uint32_t PageError;
eraseInitStruct.TypeErase = FLASH_TYPEERASE_PAGES;
eraseInitStruct.PageAddress = FLASH_USER_START_ADDR;
eraseInitStruct.NbPages = 1;
if (HAL_FLASHEx_Erase(&eraseInitStruct, &PageError) != HAL_OK)
{
// 擦除错误处理逻辑
}
uint32_t flashAddress = FLASH_USER_START_ADDR;
HAL_FLASH_Lock();
// 尝试写入数据到Flash地址
if(HAL_FLASH_Program(FLASH_TYPEPROGRAM_WORD, flashAddress, 0x12345678) != HAL_OK)
{
// 写入失败处理逻辑
}
```
通过上述方法,可以确保在开发过程中系统能够对潜在的错误有所准备,并能够在错误发生时提供保护机制,从而提高整体的系统稳定性和安全性。
以上介绍了STM32 HAL库中的一些高级功能,包括DMA应用、ADC和DAC的配置与使用,以及安全特性和故障注入测试方法。这些高级功能的运用,使得STM32微控制器在多种应用中都能表现出色,满足复杂场景下的性能和安全要求。
# 5. 基于STM32 HAL库的系统优化
随着嵌入式系统在各种行业中的广泛应用,STM32微控制器(MCU)凭借其高性能和灵活性,已成为市场上的热门选择。为了更好地满足复杂应用的需求,系统优化成为了开发者必须面对的重要课题。基于STM32 HAL库的系统优化不仅涉及到代码层面的改进,还包括能效管理和系统可靠性提升等多个维度。本章节将探讨这些方面的优化策略,以及如何通过这些策略提高STM32项目的性能和可靠性。
## 代码优化策略
代码优化是提高系统性能的直接方式之一。在STM32 HAL库的基础上,开发者可以运用一系列编译器优化技巧和代码重构方法,来提升代码的执行效率和可维护性。
### 编译器优化技巧和代码重构
编译器优化包括编译时优化和运行时优化。编译时优化主要依赖编译器的优化选项,比如GCC编译器的`-O2`或`-O3`选项,可以开启不同程度的代码优化。开发者可以通过调整编译选项,观察不同的优化级别对系统性能的影响,以达到最佳的平衡点。
代码重构则是对现有代码结构的改进,不改变程序的功能和输出。常见的重构方法包括:
- **提取方法**:将大函数拆分成小函数,使得代码更加模块化和易于理解。
- **简化条件表达式**:通过使用诸如Guard Clauses(守卫语句)等方法,简化复杂的条件判断。
- **使用设计模式**:合理应用设计模式,例如单例模式、工厂模式等,增强代码的灵活性和可重用性。
### 调试和性能分析工具的应用
在进行代码优化时,性能分析工具是不可或缺的辅助手段。例如,STM32CubeMX可以辅助生成HAL库的初始化代码,并提供系统配置的图形化界面。而STM32CubeIDE则集成了开发、调试和性能分析工具,它支持性能分析器(Profiler)来监测程序的运行时行为,包括CPU占用率、函数调用栈等信息。
使用这些工具,开发者可以找出程序的性能瓶颈,比如频繁调用的函数或执行时间过长的代码段。针对这些瓶颈进行优化,可以显著提高系统的响应速度和处理能力。
## 能耗管理与优化
STM32微控制器广泛应用于电池供电的便携式设备中。因此,能耗管理对于延长设备的电池寿命至关重要。HAL库提供了动态电压调整和省电模式等多种低功耗管理功能。
### 动态电压调整和省电模式
动态电压调整(DVFS)允许根据处理器的负载动态调整供电电压,从而在保证性能的同时减少能耗。STM32 HAL库支持通过修改系统时钟设置来实现DVFS,从而达到优化功耗的目的。
省电模式是另一种降低能耗的方法,STM32提供了多种低功耗模式,包括睡眠模式、深度睡眠模式、停止模式和待机模式。HAL库中的函数如`HAL_PWR_EnterSTOPMode()`允许程序进入停止模式,在该模式下,除了备份域外,大部分时钟都被停止,从而大幅度降低能耗。
### 任务调度和电源管理最佳实践
为了在系统中实现最优的电源管理,开发者可以结合任务调度策略来设计系统的电源管理。例如,使用实时操作系统(RTOS)来管理不同的任务和中断,并根据任务优先级和执行时间来调度。
此外,设计系统时应该考虑任务的执行频率和持续时间,尽量在不牺牲性能的前提下,让系统在低功耗模式中运行尽可能长的时间。例如,通过调整任务调度,让数据采集和处理任务在短时间内集中执行,之后让系统进入低功耗模式。
## 系统可靠性增强
在一些关键应用中,如医疗、航空和工业控制等,系统的可靠性是至关重要的。STM32 HAL库支持多种机制,来增强系统的可靠性和容错能力。
### 硬件故障检测和自检机制
STM32 HAL库提供了硬件故障检测的接口,可以通过软件来监控硬件的状态。例如,通过检查电压和电流传感器的数据,及时发现异常情况。此外,利用STM32的独立看门狗(IWDG)和窗口看门狗(WWDG),可以实现硬件级别的自我检测,当系统运行异常时,可以强制重启设备,防止系统崩溃。
### 软件容错和恢复策略
软件容错是通过代码设计来降低单点故障风险的一种方法。开发者可以在代码中实现冗余检查,比如在数据处理前进行校验和,保证数据的准确性。在发生异常时,系统可以根据预设的恢复策略,进行异常处理和恢复。
例如,可以设计一个状态机来管理系统状态,一旦检测到异常,就根据当前状态进行相应的恢复操作。HAL库中的`HAL_ADC_ErrorCallback()`函数是一个错误处理回调示例,它可以在ADC转换出错时被调用,开发者可以在此函数中实现自定义的错误处理逻辑。
通过上述策略,STM32系统可以具备更高的可靠性,即便在面对硬件故障或软件错误时,也能保证系统的基本功能不受影响,从而提高整个系统的鲁棒性。
系统优化是一个持续的过程,需要开发者不断地评估和调整。通过在STM32 HAL库基础上实施有效的代码优化、能耗管理和系统可靠性增强策略,可以显著提升系统的性能和稳定性的用户体验。下一章节将通过分析实际项目中的应用案例,展示如何在真实环境中应用这些优化策略。
# 6. STM32 HAL库在项目中的应用案例
## 6.1 实际项目中的HAL库应用分析
在实际项目开发中,选择合适的硬件平台和软件库至关重要。STM32微控制器搭配HAL库,因其稳定性和易用性,成为了许多工程师的首选。硬件选型与HAL库的适配需要考虑以下几个方面:
- **硬件性能匹配**:根据项目需求评估所需的处理能力、内存大小以及外设种类。
- **开发工具支持**:考虑是否支持开发者使用的IDE和编译器,比如Keil MDK、IAR、STM32CubeIDE等。
- **库函数兼容性**:确保HAL库版本与硬件平台兼容,以支持所有功能和优化。
**系统架构和软件设计**是项目成功的关键。良好的设计应包括模块化、可维护性和可扩展性。使用STM32 HAL库,可以通过封装底层硬件细节来简化软件设计。例如,通过HAL库的API创建抽象层,实现跨硬件平台的代码可移植性。
```c
/* HAL库抽象层示例 */
typedef struct {
void (*init)(void); // 初始化函数指针
void (*read)(uint8_t *data); // 读取数据函数指针
void (*write)(uint8_t *data); // 写入数据函数指针
} HAL_Peripheral;
/* 具体硬件初始化 */
void SPI1_init(void) {
// SPI1初始化代码
}
/* 使用HAL库抽象层 */
HAL_Peripheral SPI1 = {SPI1_init, SPI1_read, SPI1_write};
```
## 6.2 复杂应用的开发流程和挑战
随着项目复杂度的提升,开发流程中遇到的挑战也会增多。例如,实时性能和多任务处理是许多嵌入式系统设计的核心挑战。
**实时性能和多任务处理**要求开发人员对任务的实时性和优先级有清晰的规划。STM32 HAL库中的调度器可协助管理多任务,而实时操作系统(RTOS)如FreeRTOS能与HAL库集成,进一步提升任务调度能力。
```c
/* FreeRTOS与HAL库集成示例 */
void vApplicationTickHook( void ) {
// FreeRTOS周期性钩子函数
}
/* 创建任务 */
void Task1(void *pvParameters) {
while(1) {
// 任务1的代码
HAL_Delay(1000); // 使用HAL库延时
}
}
/* 系统启动函数 */
int main(void) {
HAL_Init(); // HAL库初始化
// 系统初始化代码
xTaskCreate(Task1, "Task1", 128, NULL, 1, NULL); // 创建任务
vTaskStartScheduler(); // 启动FreeRTOS调度器
}
```
**调试、测试与系统验证**是确保项目成功交付的必经之路。使用HAL库,可以结合逻辑分析仪、示波器、调试器等工具进行硬件和软件的调试。此外,单元测试和集成测试也是确保代码质量的重要手段。
## 6.3 未来展望和HAL库的发展方向
STM32 HAL库随着技术进步,不断优化和更新。在**持续优化**方面,ST官方会根据用户的反馈和市场需求,添加新功能,改进现有功能,提高性能和易用性。
面对**行业趋势**,例如物联网、人工智能和边缘计算的快速发展,STM32 HAL库也在适应这些变化,比如通过支持新的通信标准和硬件加速功能。此外,社区和第三方开发者的贡献也是HAL库发展的重要力量,开源项目和社区支持可以为HAL库带来新的应用场景和解决方案。
```mermaid
graph LR
A[开始项目] --> B[硬件选型与HAL库适配]
B --> C[系统架构和软件设计]
C --> D[开发流程]
D --> E[实时性能和多任务处理]
E --> F[调试、测试与系统验证]
F --> G[项目交付与维护]
G --> H[持续优化和社区反馈]
H --> I[未来展望和HAL库的适应性]
I --> J[结束项目]
```
以上图表展示了从项目开始到结束的整个流程,以及STM32 HAL库在其中扮演的角色和面临的未来发展方向。在整个项目周期中,HAL库为开发者提供了一个强大的工具集,以适应快速变化的技术环境和市场需求。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入剖析了 STM32 HAL 库,为初学者和专家提供了全面的指南。从基础概念到高级技术,涵盖了串口 DMA 收发机制、乒乓缓存技术、中断管理、内存优化和代码优化技巧。专栏还探讨了 STM32 性能优化策略、高级串口配置、调试和分析技术、软件架构设计、任务调度和低功耗设计。通过深入的讲解和示例代码,本专栏旨在帮助读者掌握 STM32 的精髓,实现高效的数据传输、提高性能并构建可靠的嵌入式系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
新手变专家:Vivado安装中Visual C++问题的全面解决方案

# 摘要
本文旨在详细阐述Vivado与Visual C++之间的兼容性问题及其解决策略。文章首先介绍系统的兼容性检查、Visual C++版本选择的要点和安装前的系统准备。接下来,文章深入解析Visual C++的安装流程,包括常见的安装问题、诊断、解决方法
EMC VNX存储性能调优
# 摘要
EMC VNX存储系统作为先进存储解决方案的核心产品,具有多样的性能监控、诊断和优化功能。本文对EMC VNX存储系统进行了全面概述,并详细探讨了性能监控的各个方面,包括监控指标的解释、工具使用、实时监控和告警设置以及性能数据的收集与分析。随后,文章深入分析了性能问题的诊断方法和工具,并提供了基于案例研究的实际问题解决策略。进一步,文章论述了通过硬件配置、软件优化以及策略和自动
【Kepware OPC UA深度剖析】:协议细节与数据交换背后的秘密

# 摘要
本论文系统地介绍了Kepware与OPC UA技术,首先概述了Kepware和OPC UA的基本概念及其相较于传统OPC的优势和架构。接着,深入探讨了OPC UA的信息模型、安全性机制,以及Kepware的OPC UA配置与管理工具。文章还详细分析了数据交换的实践应用,特别是在工业4.0环境中的案例
【USB 3.0兼容性问题分析】:排查连接时的常见错误

# 摘要
USB 3.0作为一种广泛采用的高速数据传输接口技术,拥有更高的传输速度和改进的电源管理特性。随着技术的成熟,兼容性问题逐渐成为用户和制造商关注的焦点。本文首先介绍了USB 3.0的技术基础及其发展,然后深入分析了USB 3.0的兼容性问题及其根源,包括硬件设计差异、驱动程序与操作系统的兼容性问题以及电源管理问题。接着,本文探讨了排查和解决USB 3.0连接
Vissim7交通流分析:深度剖析道路流量动态的5个核心因素

# 摘要
Vissim7软件是交通工程领域的重要工具,被广泛应用于交通流量的建模与仿真。本文首先概述了Vissim7软件的功能与特点,并对交通流量理论基础进行了系统性的介绍,涉及交通流参数的定义、理论模型及实际应用案例。接着,文章深入探讨了Vissim7在交通流量模拟中的具体应用,包括建模、仿真流程、关键操作
半导体器件非理想行为解码:跨导gm的潜在影响剖析

# 摘要
本文系统性地研究了半导体器件中跨导gm的非理想行为及其影响因素。第一章概述了半导体器件中普遍存在的非理想行为,随后在第二章详细探讨了跨导gm的理论基础,包括其定义、物理意义和理论模型,并介绍了相应的测量技术。第三章分析了温度、载流子浓度变化及电压应力等因素对跨导gm特
【Vue.js日历组件的动画效果】:提升交互体验的实用指南

# 摘要
本文详细探讨了Vue.js日历组件动画的设计与实现,涵盖了基础概
【DL645数据结构全解析】:深入理解与应用实例剖析
# 摘要
DL645协议作为电力行业中广泛使用的通信协议,本文对其进行了深入探讨。首先概述了DL645协议的基本概念、起源与发展以及其在物理和数据链路层的设计。随后详细解析了DL645报文格式、数据字段及其在实践应用中的具体案例,例如在智能电网和软件开发中的应用。接着,本文对DL645报文加密解密机制、数据结构的扩展与兼容性以及协议在新兴领域
西门子PID指令全解析:参数设置与调整的高级技巧

# 摘要
本论文深入探讨了PID控制理论及其在西门子PLC中的应用,旨在为工程师提供从基础理论到高级应用的完整指导。首先介绍了PID控制的基础知识,然后详细阐述了西门子PLC的PID功能和参数设置,包括参数Kp、Ki、Kd的作用与调整方法。论文还通过案例分析,展示了PID参数在实际应用中的调整过程和优化技巧
同步间隔段原理及应用:STM32F103RCT6开发板的终极指南
# 摘要
本文旨在探讨同步间隔段技术在STM32F103RCT6开发板上的应用与实践。首先,文章对同步间隔段技术进行了概述,并分析了STM32F103RCT6的核心架构,重点介绍了ARM Cortex-M3处理器的特点、内核架构、性能、以及开发板的硬件资源和开发环境。接着,深入讲解了同步间隔段的理论基础、实现原理及应用案例,特别是在实时数据采集系统和精确控制系统时间同步方面的应用。文章还包含
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )