单片机控制可控硅的常见问题与解决方案:故障分析与解决策略
发布时间: 2024-07-12 05:07:01 阅读量: 90 订阅数: 54 

# 1. 单片机控制可控硅基础**
可控硅是一种半导体功率器件,具有单向导电和可控导通的特点。单片机控制可控硅,就是利用单片机的数字信号来控制可控硅的导通和关断。
可控硅的控制原理如下:当单片机输出一个正向触发脉冲时,可控硅的触发极和主极之间产生一个正向电压,触发极电流流过可控硅的内部结构,使可控硅内部的晶闸管导通,主回路电流开始流过。当单片机输出一个负向触发脉冲时,可控硅的触发极和主极之间产生一个负向电压,触发极电流流过可控硅的内部结构,使可控硅内部的晶闸管关断,主回路电流停止流过。
通过控制触发脉冲的宽度、幅度和相位,可以实现对可控硅的导通和关断的精细控制。
# 2. 单片机控制可控硅常见问题
### 2.1 触发不成功
触发不成功是单片机控制可控硅时遇到的常见问题之一,主要原因如下:
#### 2.1.1 触发脉冲宽度不足
触发脉冲宽度是触发可控硅导通的关键参数。如果触发脉冲宽度不足,可控硅无法获得足够的能量而导通。一般来说,触发脉冲宽度应大于可控硅的最小触发脉冲宽度,具体值可参考可控硅的数据手册。
```cpp
// 触发可控硅的代码示例
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); // 设置触发引脚为高电平
HAL_Delay(10); // 触发脉冲宽度为 10us
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); // 设置触发引脚为低电平
```
**参数说明:**
* `HAL_GPIO_WritePin()`:设置 GPIO 引脚的电平
* `GPIOA`:GPIO 端口
* `GPIO_PIN_0`:GPIO 引脚号
* `GPIO_PIN_SET`:设置引脚为高电平
* `GPIO_PIN_RESET`:设置引脚为低电平
* `HAL_Delay()`:延时函数,单位为微秒
**代码逻辑分析:**
该代码通过设置 GPIO 引脚的电平来产生触发脉冲。触发脉冲的宽度由 `HAL_Delay()` 函数的参数指定,在本例中为 10us。
#### 2.1.2 触发脉冲幅度过低
触发脉冲幅度也是影响可控硅触发成功的重要因素。如果触发脉冲幅度过低,可控硅无法获得足够的电压而导通。一般来说,触发脉冲幅度应高于可控硅的最小触发电压,具体值可参考可控硅的数据手册。
```cpp
// 提高触发脉冲幅度的代码示例
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_SET); // 设置触发引脚为高电平
HAL_Delay(10); // 触发脉冲宽度为 10us
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET); // 设置触发引脚为低电平
```
**参数说明:**
* `HAL_GPIO_WritePin()`:设置 GPIO 引脚的电平
* `GPIOA`:GPIO 端口
* `GPIO_PIN_0`:GPIO 引脚号
* `GPIO_PIN_SET`:设置引脚为高电平
* `GPIO_PIN_RESET`:设置引脚为低电平
* `HAL_Delay()`:延时函数,单位为微秒

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨单片机控制可控硅的技术,从原理、接线、应用指南到实战指南,全面解析单片机控制可控硅的奥秘。专栏涵盖调光、调速、PID调控、过零检测、驱动电路设计、故障诊断、EMC设计、安全设计等方面,并提供工业控制、智能家居、医疗设备等应用案例。此外,专栏还探讨了单片机控制可控硅的优化技术、新技术、与其他控制技术的比较、常见问题与解决方案、最佳实践、性能评估、维护与保养等内容,为读者提供全面的知识和实践指南。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【新手必备】:Wireless Development Suite快速掌握与最佳实践5大技巧

# 摘要
本文对Wireless Development Suite(WDS)进行综合介绍,涵盖了从环境搭建、项目初始化到基础开发技巧,再到无线网络优化,以及最后的安全与性能调优等关键方面。首先,本文详细说明了WDS的安装流程、系统要求和兼容性,同时指导读者如何创建开发项目、配置开发环境。然后,深入探讨了无线通信协议栈代码编写技巧、设备驱动开发及数据采集处理方法。在此基础上,
华为通信工程师面试指南:10大难点与热点问题实战模拟

# 摘要
随着通信行业的迅猛发展,华为等通信巨头对工程师的选拔标准日益提高。本文旨在为通信工程师面试者提供一个全面的面试准备指南。首先概述了华为通信工程师面试的基本流程和结构,随后深入分析了面试中的难点,包括理论基础、热点技术问题以及应对策略与技巧。实战模拟章节通过案例分析和模拟题目解答,提供了技术问题的深度解析和面试技巧的实践指导。此外,本文还
S7-1200 OB30工业实战案例:掌握关键生产环节的优化技巧
# 摘要
本文全面介绍了S7-1200 PLC和OB30的理论基础、功能以及在生产自动化中的应用。首先,概述了S7-1200 PLC的硬件和软件架构,并分析了OB30的定义、作用和在实际生产中的应用实例。接着,探讨了如何优化关键生产环节,通过设定目标指标、诊断问题并应用OB30进行有效处理。文中还对OB30的高级编程技巧进
MPPI与传统路径规划算法:对比分析与优势解读

# 摘要
路径规划是机器人学和自动驾驶领域中的关键问题。本文首先介绍了路径规划算法的基础概念,随后深入探讨了MPPI算法的核心原理,包括其数学模型、概率解释和工作流程。文章详细分析了MPPI算法在并行计算和环境适应性方面的计算优势。第三章回顾了传统路径规划算法,并对比了它们的分类、特性及优化策略。
【遥控芯片故障诊断与排除】:实用技巧大放送
# 摘要
本文全面探讨了遥控芯片故障诊断与排除的关键问题,涵盖了遥控芯片的工作原理、故障类型、诊断工具与方法、排除技巧及实践案例分析,并展望了未来故障诊断技术的发展趋势。文章首先介绍了遥控芯片的基础知识,随后深入分析了各种常见的硬件和软件故障类型及其成因。接下来,本文详细论述了有效诊断和排除故障的工具和流程,并通过实际案例展示了故障处理的技巧。最后,文章提出了基于AI的智能化故障诊断技术
【Notepad++高级技巧】:TextFX插件功能详解与应用
# 摘要
Notepad++是一款流行的文本和源代码编辑器,通过插件如TextFX大幅增强其文本处理能力。本文首先介绍Notepad++和TextFX插件的基础知识,随后深入探讨TextFX的文本处理基础,包括基本操作、文本转换与格式化以及批量文本处理。进阶技巧章节着重于文本统计与分析、正则表达式高级应用和插件管理与扩展。实际开发应用案例章节展示了TextFX在代码美化、日志文件分析和项目文档生成中的使用。最后,本文讨论了TextFX插件的自定义与优化,包括个性化命令的创建、性能优化策略以及社区资源和贡献方面的信息。本文旨在为开发者提供全面的TextFX使用指南,以提高日常工作的文本处理效率和
深度剖析Twitter消息队列架构:掌握实时数据流动

# 摘要
本文详细探讨了消息队列在实时数据流处理中的基础应用及其在Twitter架构中的核心角色。首先分析了高性能消息队列的选择标准和Twitter的架构决策因素。接着,深入研究了分布式消息队列设计原理,包括分布式挑战、数据分区及负载均衡策略。文章还讨论了消息持久化和灾难恢复的重要性及其在Twitter中的实施方法。进一步,本文提供了消息队列性能优化、监
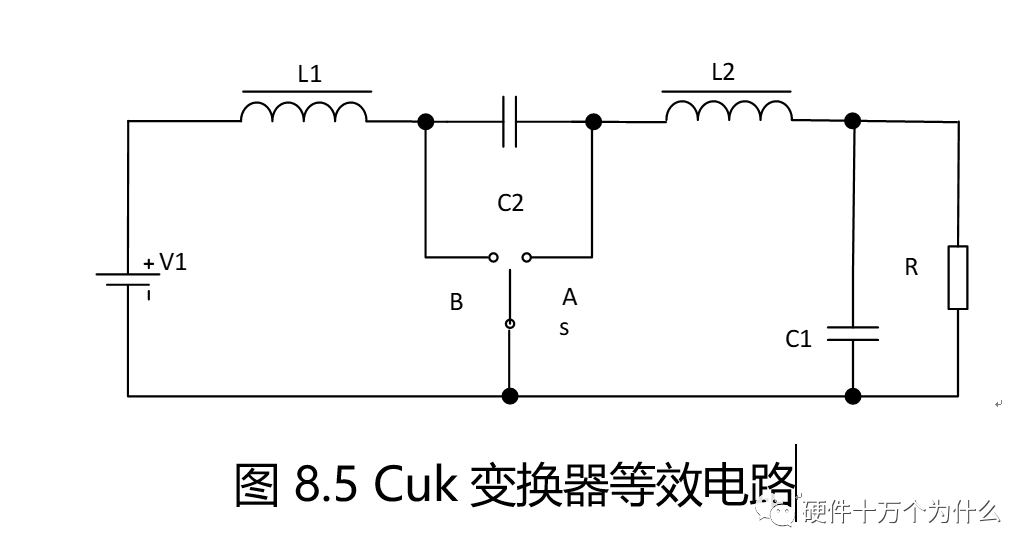
Cuk电路设计软件应用秘籍:5个技巧提高效率与准确性
# 摘要
本文详细介绍了Cuk电路设计软件的各个方面,涵盖了从理论基础到实际应用的核心技巧,再到高级功能的深入探讨。首先概述了Cuk电路设计软件的基本概念和功能,接着深入探讨了Cuk转换器的工作原理,包括电路模式分析和关键参数对性能的影响。进一步,本文分析了Cuk电路设计中的数学模型,重点关注稳态与暂态分析以及动态稳定性的评
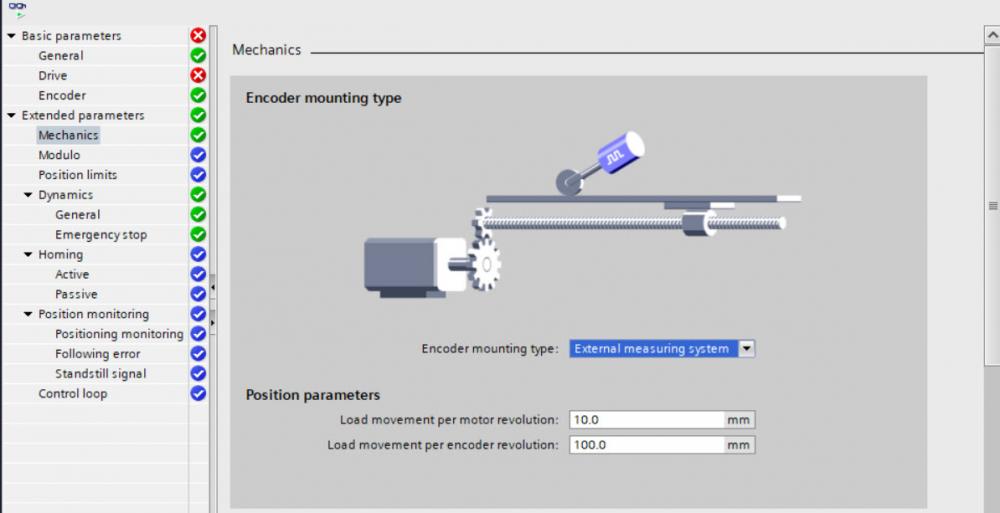
【汇川IS500伺服驱动器:参数设置高级技巧】
# 摘要
本文全面介绍了汇川IS500伺服驱动器参数设置的相关知识。首先概述了伺服驱动器参数设置的基本概念,随后深入解析了参数的种类、功能以及设置的基本流程。接着,针对运动控制参数、电子齿轮比、编码器参数以及安全与故障诊断参数的高级设置进行了具体实践分析。通过典型案例分析与故障排除,本文提供了实用的设置策略和解决方案。最后,文章展望了伺服驱动器参数设置的未来趋势,特别是智能化和新技术的集成应用。
# 关键字
伺服驱动器;参数设置;运动控制;故障诊断;远程管理;智能化趋势
参考资源链接:[汇川IS500伺服驱动器详解:一体化设计与全面功能指南](https://wenku.csdn.net/
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )