STM32单片机CAN总线通信:工业级网络通信的深入解析
发布时间: 2024-07-03 02:29:06 阅读量: 6 订阅数: 14 
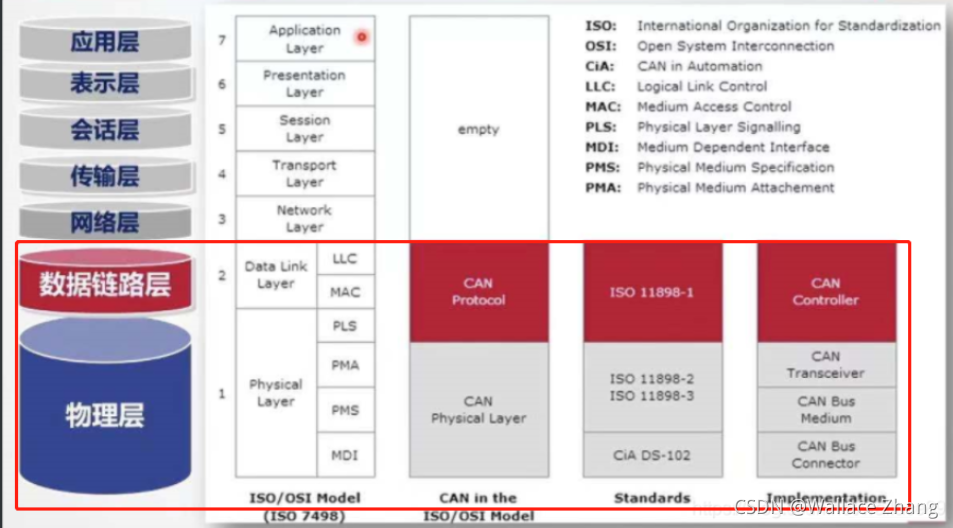
# 1. STM32单片机CAN总线概述
CAN(控制器局域网)总线是一种广泛应用于工业自动化、汽车电子等领域的通信协议。它具有高可靠性、抗干扰能力强、数据传输速率高等优点。
STM32单片机是意法半导体公司推出的高性能微控制器系列,其中许多型号都集成了CAN总线接口。这使得STM32单片机成为开发CAN总线应用的理想选择。
本篇文章将从CAN总线概述、通信原理、STM32单片机CAN总线编程、通信实践应用、故障诊断与维护以及工业应用拓展等方面对STM32单片机CAN总线进行全面的介绍,旨在帮助读者深入理解和掌握CAN总线技术在STM32单片机上的应用。
# 2. CAN总线通信原理
### 2.1 CAN总线协议详解
#### 2.1.1 CAN总线帧格式
CAN总线帧由以下字段组成:
| 字段 | 长度 (位) | 描述 |
|---|---|---|
| 起始位 | 1 | 逻辑0,表示帧的开始 |
| 仲裁场 | 11/29 | 用于节点竞争总线访问权 |
| 控制场 | 6 | 包含帧类型、数据长度和CRC校验位 |
| 数据场 | 0-8 | 数据字段,可传输 0-8 字节的数据 |
| CRC校验场 | 15 | 循环冗余校验,用于检测数据错误 |
| ACK位 | 1 | 应答位,接收节点发送逻辑0表示接收成功 |
| 结束位 | 7 | 逻辑1,表示帧的结束 |
#### 2.1.2 CAN总线通信机制
CAN总线采用非破坏性仲裁机制,优先级高的节点可以抢占总线。仲裁场中数值越小,优先级越高。
CAN总线通信流程如下:
1. **总线空闲检测:**发送节点检测总线是否空闲,若空闲则开始发送。
2. **仲裁:**发送节点发送仲裁场,若有其他节点发送更高优先级的仲裁场,则发送节点停止发送,进入接收模式。
3. **数据发送:**发送节点发送数据场。
4. **应答:**接收节点收到数据后,发送应答位表示接收成功。
5. **错误检测:**如果接收节点检测到错误,则发送错误帧。
### 2.2 CAN总线硬件接口
#### 2.2.1 CAN收发器原理
CAN收发器是CAN总线与微控制器之间的接口。它负责将微控制器的数字信号转换为CAN总线上的差分信号,并接收CAN总线上的差分信号并转换为数字信号。
CAN收发器的主要功能包括:
- 差分发送和接收
- 故障保护
- 唤醒功能
#### 2.2.2 STM32单片机的CAN接口
STM32单片机内置CAN接口,可直接与CAN收发器连接。CAN接口包含以下寄存器:
- **CAN控制寄存器 (CAN_CR):**控制CAN模块的配置和操作。
- **CAN状态寄存器 (CAN_SR):**反映CAN模块的状态。
- **CAN发送数据寄存器 (CAN_TxDR):**存储要发送的数据。
- **CAN接收数据寄存器 (CAN_RxDR):**存储接收到的数据。
- **CAN过滤器寄存器 (CAN_FMR):**配置CAN过滤器。
**代码块:**
```c
// 配置CAN接口
RCC->APB1ENR |= RCC_APB1ENR_CAN1EN; // 使能CAN1时钟
CAN1->MCR |= CAN_MCR_INRQ; // 初始化请求
CAN1->MCR &= ~CAN_MCR_INRQ; // 退出初始化模式
// 设置波特率
CAN1->BTR = 0x00000007; // 125kbps,晶振8MHz
```
**逻辑分析:**
* `RCC->APB1ENR |= RCC_APB1ENR_CAN1EN;`:使能CAN1时钟。
* `CAN1->MCR |= CAN_MCR_INRQ;`:进入初始化模式。
* `CAN1->MCR &= ~CAN_MCR_INRQ;`:退出初始化模式。
* `CAN1->BTR =
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《STM32单片机原理与工程实践》专栏深入探讨STM32单片机的原理和实际应用。从入门到精通,专栏提供了一系列全面而系统的教程,涵盖时钟、中断、GPIO、ADC、DAC、定时器、PWM、SPI通信、DMA、RTOS、文件系统、图形显示、触摸屏、电机控制、传感器应用、电源管理和故障诊断等关键主题。通过深入浅出的讲解和丰富的实战技巧,专栏帮助读者掌握STM32单片机的核心知识和实际编程能力,从而在嵌入式系统开发中游刃有余。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
单片机C语言程序设计中的版本控制与协作开发:多人协作,高效开发
# 1. 单片机C语言程序设计中的版本控制概述
在单片机C语言程序设计中,版本控制是至关重要的,它可以帮助开发团队管理代码更改、跟踪历史记录并促进协作。版本控制工具,如Git,使开发人员能够有效地管理代码库,从而提高开发效率和代码质量。
版本控制系统提供
云计算中的弹性伸缩:应对业务流量波动

# 1. 云计算弹性伸缩概述**
云计算弹性伸缩是一种自动调整计算资源(例如服务器、容器或无服务器函数)容量以满足变化的工作负载需求的技术。通过弹性伸缩,应用程序可以根据流量或使用情况的波动自动扩展或缩减,从而优化性能、降低成本并提高可用性。
弹性伸缩的优势包括:
* **提高性能:**自动扩展可确保应用程序始终拥有满足当前工作负载需求的资源,从而减少延迟和提高响应时间。
* **降低
单片机查表程序设计中的可维护性指南:方便后期修改和扩展,保障代码质量
# 1. 查表程序设计基础**
查表程序设计是一种广泛用于单片机系统中的技术,它通过预先存储数据在表格中,然后通过索引快速查找所需数据。查表程序设计具有高效、占用资源少等优点,但同时也存在可维护性差的问题。
可维护性是指代码易于理解、修改和扩展的能力。对于查表程序设计来说,可维护性尤为重要,因为表格数据和查找算法可能会随着需
【向量范数揭秘】:从本质到应用,全面掌握向量范数的秘密

# 1. 向量范数的本质**
向量范数是一个函数,它将向量映射到一个非负实数。它衡量了向量的“长度”或“大小”。向量范数在机器学习、图像处理和信号处理等许多领域都有广泛的应用。
向量范数满足以下
量子计算中的Delaunay三角剖分:未来科技,无限可能

# 1. 量子计算概述
量子计算是一种利用量子力学原理进行计算的新型计算范式。与经典计算机不同,量子计算机利用量子比特(Qubit)作为基本计算单位,具
:坐标网与物联网的协同:空间信息感知与互联的未来
# 1. 坐标网与物联网概述
坐标网是基于空间参考系统建立的,用于描述地球上位置和空间关系的网络。它提供了一套统一的框架,用于定位、导航和地理信息系统(GIS)等应用。
物联网(IoT)是一组相互连接的物理设备,通过网络连接和数据交换实现智能化。它使物理世界中的对象能够感知、通信和执行任务,从而实现自动化和决策。
坐标网与物联网的协同结合了空间信息感知和物联网感知技术,为智能化应用提供了强大的基础。通过融合空间信息和物联网
单片机C语言编程实战案例:从入门到精通,打造高性能嵌入式系统

# 1. 单片机C语言编程基础
单片机C语言编程是嵌入式系统开发的基础,它是一种面向过程的编程语言,具有高效、灵活、可移植性好等特点。本章将介绍单片机C语言编程的基础知识,包括数据类型、变量、流程控制、内存管理等内容。
### 1.1 数据类型与变量
数据类型是用来描述数据的类型和属性,单片机C语言中基本数据类型包括:整型(int)、浮点型(float)、字符型(char)、布
51单片机C语言嵌入式系统实时控制指南:理解实时控制原理与实现,打造响应迅速且可靠的嵌入式系统
# 1. 实时控制基础
实时控制是嵌入式系统中至关重要的概念,它要求系统对外部事件做出快速、可靠的响应。本章将介绍实时控制的基础知识,包括:
- 实时系统的定义、特性和分类
- 实时任务调度算法,如先到先服务 (FCFS)、最短作业优先 (SJF) 和速率单调调度 (RMS)
- 实时系统中的同步和通信机制,如互斥体、信号量和消息队列
# 2. 51单片机C语言编程基础**
**2.1 数据类型和变量**
在5
单片机技术发展趋势:把握行业前沿,引领技术创新

# 1. 单片机技术概述
单片机是一种集成在单个芯片上的微型计算机,具有独立的存储器、处理器和输入/输出接口。它具有体积小、功耗低、成本低、可靠性高等优点,广泛应用于各种电子设备中。
单片机技术是一种微电子技术,涉及到计算机科学、电子工程和软件工程等多个学科。它主要包括单片机芯片设计、单片机系统设计、单片机程序开发等方面。
随着科学技术的不断发展,单片机技术也在不断进步。近年来,单片机芯片的性能和功能不断提升,
单片机语言C51程序设计与大数据:从数据采集到数据分析,挖掘数据价值
# 1. 单片机语言C51程序设计基础**
单片机语言C51是一种基于8051单片机架构的高级语言,广泛应用于嵌入式系统开发中。它具有结构化、模块化和可移植性等特点,使得程序设计更加高效和便捷。
C51语言的基本语法与C语言类似,但针对单片机的特殊特性进行了优化。它支持多种数据类型、控制结构和函数,并提供了丰富的库函数,方便程序员进行各种操作。
C51程序设计涉及到寄存器操作、中断处
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )