无人机控制的实时性与稳定性优化
发布时间: 2024-02-29 11:12:10 阅读量: 71 订阅数: 28 

航空和无人机运输优化相关
# 1. 无人机控制系统概述
## 1.1 无人机控制系统的定义和意义
无人机控制系统是指通过一系列技术手段对无人机进行飞行控制和任务执行的系统。随着无人机技术的快速发展,无人机控制系统在军事、民用、科研等领域都有着重要的应用价值。其通过自动驾驶、导航、避障等功能,实现了无需人为操控的飞行任务,提高了飞行效率和安全性,拓展了无人机的应用领域。
## 1.2 无人机控制的发展历程
无人机控制系统的发展可以追溯到20世纪50年代初,当时主要应用于军事侦察和目标打击。随着传感器技术、人工智能算法和通信技术的不断进步,无人机控制系统逐渐实现了自主飞行、多机协同等复杂功能。近年来,随着无人机市场的蓬勃发展,无人机控制技术又迎来了新的突破和挑战。
## 1.3 无人机控制系统的基本组成
无人机控制系统通常包括飞行控制系统、导航系统、遥控系统和通信系统等模块。飞行控制系统负责控制飞行姿态和飞行轨迹,导航系统则用于确定飞行位置和航向。遥控系统提供远程操控手柄或地面站,实现人为干预和指挥。通信系统则实现无人机与地面指挥中心的数据传输和指令下达。这些模块共同组成了一个完整的无人机控制系统。
# 2. 实时性优化的关键技术
在无人机控制系统中,实时性是非常重要的一个指标。为了保证无人机在飞行过程中能够做出及时而准确的响应,需要利用一些关键技术来优化实时性。
### 2.1 传感器技术在无人机实时性中的应用
传感器技术在无人机控制系统中起着至关重要的作用,它可以实时地获取无人机周围环境的数据信息,帮助飞控系统做出及时的反馈控制。常见的传感器包括加速度计、陀螺仪、气压计、GPS等。通过合理配置和优化传感器,可以提高无人机的实时性能。
```python
# 示例代码:使用加速度计传感器获取数据
import accelerometer
def get_acceleration():
accel_data = accelerometer.read_data()
return accel_data
# 实时获取加速度数据并应用于控制系统
while True:
acceleration = get_acceleration()
control_system.update(acceleration)
```
**代码总结:** 上述代码演示了如何利用加速度计传感器获取数据,并在无人机控制系统中实时应用。传感器数据的实时读取和应用可以提高控制系统的响应速度和稳定性。
### 2.2 控制算法的优化与实时性
控制算法的优化对于提高无人机控制系统的实时性至关重要。通过对控制算法的优化,可以减少计算复杂度、降低延迟,从而提高系统的实时性能。常见的控制算法包括PID控制器、模糊控制、神经网络等,针对不同应用场景需选择合适的算法并进行优化。
```java
// 示例代码:PID控制器实现
public class PIDController {
private double kp;
private double ki;
private double kd;
public PIDController(double kp, double ki, double kd) {
this.kp = kp;
this.ki = ki;
this.kd = kd;
}
public double calculateControlOutput(double desired, double cu
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ICM-20948数据手册深度剖析:掌握9轴运动传感器技术细节

参考资源链接:[ICM-20948:9轴MEMS运动追踪设备手册](https://wenku.csdn.net/doc/6412b724be7fbd1778d493ed?spm=1055.2635.3001.10343)
# 1. ICM-20948 9轴运动传感器概述
在当今的智能设备中,运动传感器已经成为不可或缺的一部分,
B-66284EN PICTURE图形化编程:2小时掌握提高效率的秘诀
参考资源链接:[FANUC PICTURE中文操作手册:安全与详尽指南](https://wenku.csdn.net/doc/103s4j8sbv?spm=1055.2635.3001.10343)
# 1. B-66284EN PICTURE图形化编程入门
## 1.1 B-66284EN PICTURE简介
B-66284EN PICTURE是一种图形化编程语言
GMW3172深度剖析:汽车材料与零件性能的终极要求
参考资源链接:[GMW3172_Handbook_Version_19.pdf](https://wenku.csdn.net/doc/6401acf0cce7214c316edb16?spm=1055.2635.3001.10343)
# 1. 汽车材料与零件性能的基本概念
汽车制造业是人类技术进步的重要体现,而材料与零件的性能则是确保汽车安全、效率与舒适性的基础。本章旨在介绍汽车材料与零件性能的基本概念,为后续章节关于性能分析、测试方法、影响因素以及优化策略的深入探讨奠定基础。
汽车材料通常指用于汽车制造的各种金属、合金、塑料、复合材料等,它们需满足特定的机械性能、物理性能和化学性能,
【VMware软件安装步骤详解】:新手也能轻松驾驭的安装向导

参考资源链接:[ThinkPad VMware:Intel VT-x禁用问题及解决步骤](https://wenku.csdn.net/doc/6uhie
【云计算终极指南】
参考资源链接:[郑州十校2021-2022学年高二期中物理试题分析](https://wenku.csdn.net/doc/2pkvprcr8x?spm=1055.2635.3001.10343)
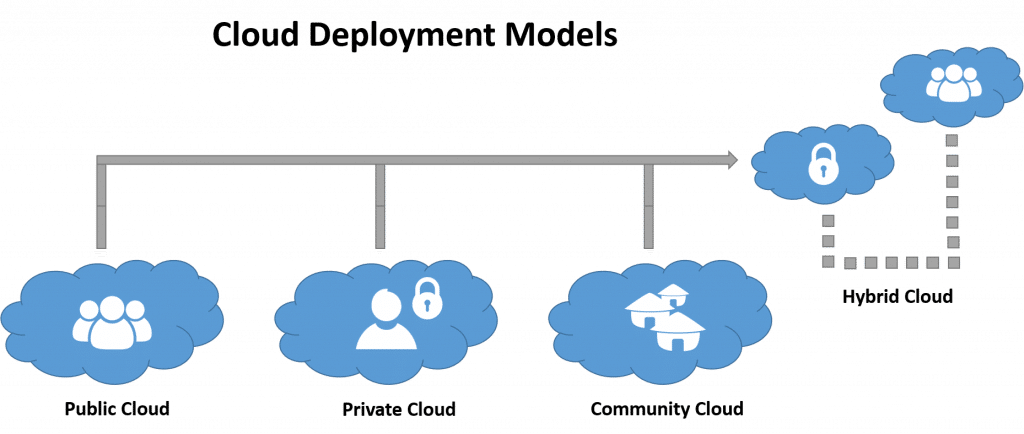
# 1. 云计算的概念与架构
云计算是一种基于互联网的计算模式,它通过互联网提供便捷、可配置的计算资源(如网络、服务器、存储、应用程序和资源)。这一模式使得计算资源能够
SoftMove云服务优化:云集成与性能调优的终极指南
参考资源链接:[ABB机器人SoftMove中文应用手册](https://wenku.csdn.net/doc/1v1odu86mu?spm=1055.2635.3001.10343)
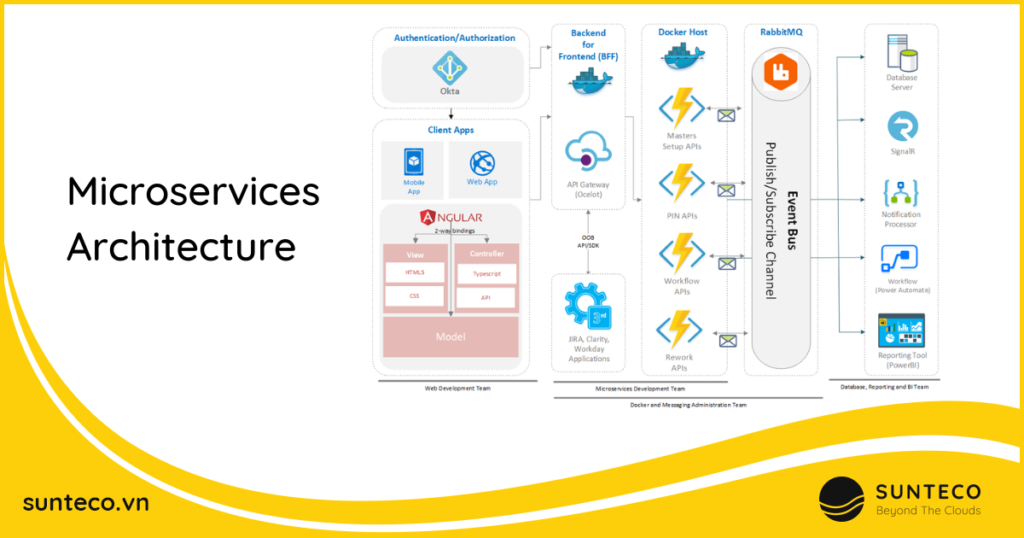
# 1. SoftMove云服务架构概述
## 1.1 云服务架构定义
SoftMove云服务架构是一个
揭秘VGA时序标准:从电子到图像的转换机制
参考资源链接:[VESA全解析:VGA时序标准指南及行业常用显示参数](https://wenku.csdn.net/doc/1n5nv9qcym?spm=1055.2635.3001.10343)
# 1. VGA技术与图像显示基础
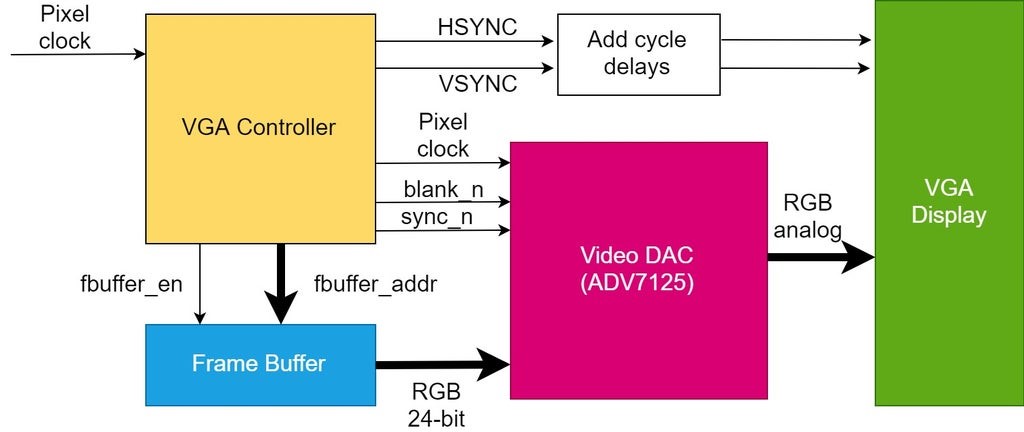
## 1.1 VGA技术简介
VGA(Video Graphics Array,视频图形阵列)是一种模拟电脑显示标准,于1987年由IBM公司推出。它的最大优势在于广泛的硬件兼容性和丰富的颜色表现。VGA支持最多256种颜色的图
【高斯分布到Isserlis' Theorem】:统计学关键链接的详细解读
参考资源链接:[Isserlis定理:多元正态分布任意阶混合矩的通用公式证明](https://wenku.csdn.net/doc/6tpi5kvhfa?spm=1055.2635.3001.10343)
# 1. 高斯分布的数学基础
在统计学和概率论中,高斯分布,也被称为正态分布,是最为常见且广泛研究的连续概率分布。其数学基础在很大程度上
UCINET 6实战演练:社区检测技术的详尽解读

参考资源链接:[UCINET 6 for Windows中文手册:详解与资源指南](https://wenku.csdn.net/doc/7enj0faejo?spm=1055.2635.3001.10343)
# 1. UCINET 6简介与社区检测概述
社区检测是复杂网络分析的重要环节,其目标在于识别网络中的群体结构,这些群体内的节点相互连接紧密,而群体间连接相对稀疏。UCINET(University of Calif
深入浅出Gel-PRO ANALYZER:软件界面与功能详解

参考资源链接:[Gel-PRO ANALYZER软件:凝胶定量分析完全指南](https://wenku.csdn.net/doc/15xjsnno5m?spm=1055.2635.3001.10343)
# 1. Gel-PRO ANALYZER软件概述
Gel-PRO ANALYZER是一款专业的凝胶图像分析软件,广泛应用于分子生物学领域。它能对蛋白质、DNA、R
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )