YOLOv8特征提取技术大揭秘:行业案例与实战指南
发布时间: 2024-12-12 04:08:01 阅读量: 15 订阅数: 7 

YOLOv11数据集特征提取:技术详解与代码实践
# 1. YOLOv8的进化与技术革新
## YOLOv8的技术迭代背景
YOLOv8(You Only Look Once version 8)是目标检测算法YOLO系列最新一代的版本,它在前代的基础上带来了诸多的技术革新。随着深度学习领域的不断进步,YOLOv8在精度、速度和易用性方面都有显著的提升。本章将概述YOLOv8相较于先前版本所经历的变革,讨论它如何满足日益增长的实时图像处理需求。
## 从YOLOv5到YOLOv8:演变过程分析
YOLOv8的诞生是基于先前版本的不断反馈和应用实践。YOLOv5作为过渡版本,在简化架构、提高执行效率方面取得了重大进展。而YOLOv8进一步优化了这些特点,并在模型轻量化、准确性上做了重要改进。本节将探讨YOLOv8如何通过技术迭代,克服了先前版本的限制,并引入了新的网络结构和训练策略。
## YOLOv8的关键创新点
YOLOv8的创新之处在于引入了新的特征提取技术和优化算法。本节将解析YOLOv8采用的最新架构设计理念,例如引入的多尺度特征融合和改进的损失函数。这些创新使得YOLOv8在处理复杂场景时具有更出色的性能,例如在光线不足或目标重叠的情况下仍保持高准确度。我们会进一步探究这些技术如何使得YOLOv8不仅在速度上,更在检测精度上都有了质的飞跃。
通过以上内容,读者将对YOLOv8的整体技术进步有一个宏观的了解,并对其背后的深层原理产生兴趣,为后续章节的深入探讨做好铺垫。
# 2. 深度学习基础知识回顾
深度学习是机器学习的一个分支,它通过模仿人脑的结构和功能来处理数据,并从中提取信息。它利用了由多层神经元组成的神经网络来学习数据的高层次特征,这使得它在图像识别、语音识别、自然语言处理等众多领域取得了突破性的成果。
### 神经网络与卷积神经网络(CNN)
#### 神经网络的基本组成和工作原理
神经网络由输入层、隐藏层(一个或多个)和输出层组成。每个层包含多个神经元,神经元之间通过权值(weights)连接。基本工作原理是通过数据前向传播来计算输出,再通过反向传播算法优化网络参数。
```python
# 示例代码块:简单的神经网络前向传播
import numpy as np
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def forward_pass(inputs, weights):
# inputs 是输入数据,weights 是网络权重矩阵
hidden_layer = sigmoid(np.dot(inputs, weights['input_to_hidden']))
output = sigmoid(np.dot(hidden_layer, weights['hidden_to_output']))
return output
# 假设输入和权重数据已经定义
inputs = np.array([0.5, -0.2])
weights = {
'input_to_hidden': np.array([[0.4, -0.5], [-0.3, 0.6]]),
'hidden_to_output': np.array([[0.7], [-0.1]])
}
# 进行前向传播
output = forward_pass(inputs, weights)
print(output)
```
在上述代码中,输入数据 `inputs` 和权重 `weights` 被用来计算输出,`sigmoid` 函数用于引入非线性,使得网络能学习复杂的函数映射。
#### 卷积神经网络的特征与优势
卷积神经网络(CNN)特别适用于处理具有网格拓扑结构的数据,例如图像。CNN 通过卷积层提取图像的局部特征,并利用池化层(Pooling Layers)来减少特征的空间尺寸,从而减少计算量和过拟合的风险。
```python
# 示例代码块:CNN层的实现(未包含模型构建、训练等后续步骤)
from keras.models import Sequential
from keras.layers import Conv2D, MaxPooling2D
model = Sequential()
model.add(Conv2D(filters=32, kernel_size=(3, 3), activation='relu', input_shape=(28, 28, 1)))
model.add(MaxPooling2D(pool_size=(2, 2)))
# 这里模型构建完成,可以进行模型训练和评估
```
在CNN的实现中,`Conv2D` 层用于执行图像的卷积操作,而`MaxPooling2D`层则用于进行下采样操作,这有利于提取图像的关键特征并减少计算复杂度。
### 深度学习的训练策略
#### 损失函数和优化算法
损失函数用于衡量模型预测值和实际值之间的差异,常用的损失函数包括均方误差(MSE)、交叉熵(Cross-Entropy)等。优化算法如梯度下降法(GD)、随机梯度下降(SGD)和其变种(如Adam、RMSprop)用于调整网络参数,最小化损失函数。
```python
# 示例代码块:损失函数计算和优化器的应用
from keras import losses
from keras.optimizers import Adam
# 假设使用交叉熵损失函数
loss_function = losses.binary_crossentropy
# 使用Adam优化器
optimizer = Adam(learning_rate=0.001)
# 优化器使用损失函数进行模型参数的优化
# 这里没有提供具体的模型和数据,仅为展示如何应用损失函数和优化器
```
#### 正则化技术和避免过拟合
正则化技术如L1、L2正则化可以防止模型过于复杂导致过拟合。此外,Dropout是一种有效的防止过拟合的策略,它通过在训练过程中随机丢弃网络中的部分神经元来工作。
```python
# 示例代码块:在Keras中添加Dropout层
from keras.layers import Dropout
model = Sequential()
model.add(Dense(units=64, activation='relu', input_shape=(input_size,)))
model.add(Dropout(rate=0.5))
model.add(Dense(units=10, activation='softmax'))
# Dropout层将在训练过程中随机关闭一半的神经元,有助于防止过拟合
```
### 深度学习的框架与工具
#### 常用深度学习框架介绍
目前主流的深度学习框架有TensorFlow、PyTorch、Keras等。这些框架提供了强大的API支持,可以方便地构建复杂的神经网络模型,进行训练和评估。
#### 模型的构建、训练与部署
构建模型时需要定义模型架构、编译模型,并指定损失函数和优化器。训练模型通常使用大量标记数据,通过反向传播更新权重。最后,将训练好的模型部署到服务器或嵌入式设备上,实现产品级别的应用。
```python
# 示例代码块:模型的构建、训练与评估(以Keras为例)
from keras.models import Sequential
from keras.layers import Dense, Activation
from keras.datasets import mnist
from keras.utils import to_categorical
# 构建一个简单的全连接神经网络模型
model = Sequential([
Dense(64, input_shape=(784,)),
Activation('relu'),
Dense(10),
Activation('softmax')
])
# 编译模型
model.compile(loss='categorical_crossentropy', optimizer='adam', metrics=['accuracy'])
# 加载MNIST数据集,并进行预处理
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train = x_train.reshape(60000, 784).astype('float32') / 255
x_test = x_test.reshape(10000, 784).astype('float32') / 255
y_train = to_categorical(y_train)
y_test = to_categorical(y_test)
# 训练模型
model.fit(x_train, y_train, epochs=5, batch_size=32)
# 评估模型
loss, accuracy = model.evaluate(x_test, y_test)
print(f'Test accuracy: {accuracy}')
```
在这个示例中,我们构建了一个使用MNIST数据集的分类器,通过编译、训练和评估来验证模型性能。这些步骤是深度学习项目中不可或缺的环节。
通过本章节的介绍,我们回顾了深度学习的基础知识,涵盖了从神经网络的基本组成和工作原理,到训练策略中的损失函数和优化算法,再到常用的深度学习框架和模型构建、训练、部署的流程。这些内容为接下来深入学习YOLOv8的架构与特征提取技术奠定了坚实的基础。
# 3. YOLOv8的架构与特征提取技术
## 3.1 YOLOv8的网络架构分析
### 3.1.1 YOLOv8的网络结构特点
YOLOv8作为一个强大的目标检测模型,在网络结构上也展现出了其独特性。YOLOv8的网络架构借鉴并发展了早期YOLO版本中的Darknet框架,同时在多个关键部分实现了创新性改进。
**自适应特征聚合层(AFAP):** YOLOv8引入了自适应特征聚合层(AFAP),这种层结构能够根据图像内容和任务需求动态调整特征聚合的方式,提高了对目标细节的捕捉能力。
**跨尺度连接:** 另一个显著特点是对不同尺度特征图的连接方式进行了优化。YOLOv8通过混合不同尺度的特征图,增强了模型对小目标检测的敏感度,同时保持了检测大目标的能力。
**改进的残差结构:** YOLOv8在残差连接和跳跃连接的基础上,进一步优化了网络的深层特征传递机制,这有助于缓解深层网络训练过程中梯度消失和信息瓶颈的问题。
### 3.1.2 与前代YOLO系列的对比
YOLOv8与之前的YOLO版本相比,在多个方面都有所提升:
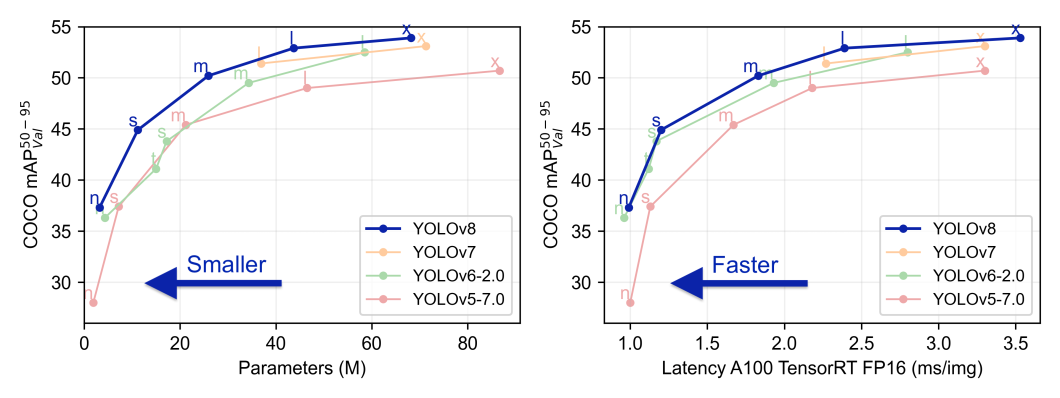
**检测精度:** 在保持高速度的同时,YOLOv8在标准数据集如COCO上的平均精度(mAP)有了显著提升。
**速度与效率:** YOLOv8在同等精度下,能够以更快的速度运行,非常适合实时应用。
**模型泛化能力:** 通过大量实验数据和复杂场景的测试,YOLOv8展现出了更强的泛化能力,能够更好地适应不同的数据分布和任务需求。
## 3.2 特征提取机制详解
### 3.2.1 特征提取的原理与流程
在深度学习目标检测模型中,特征提取是至关重要的步骤。YOLOv8通过其特有的网络结构,实现了对图像中目标的高效特征提取。
**卷积层:** 卷积层负责从输入图像中提取空间特征,通过滤波器滑动窗口的方式,提取局部特征并形成特征图。
**池化层:** 池化层用于降低特征图的维度,从而减少计算量。它还能使提取的特征对小的平移更加鲁棒。
**多尺度特征融合:** YOLOv8通过特殊设计的网络结构实现多尺度特征融合,它能够将不同尺度的特征图进行有效结合,从而对不同大小的目标都能有很好的检测能力。
### 3.2.2 关键技术点:多尺度特征融合
多尺度特征融合技术是YOLOv8改进的关键所在。在此技术中,网络将多个尺度的信息结合起来,使得每一层都能够捕获不同尺度的特征。
**特征金字塔网络(FPN):** YOLOv8在FPN的基础上进一步发展,通过上采样和融合操作,将高层的语义信息和低层的细节信息结合起来,形成丰富的特征表示。
**自适应权重计算:** 在融合不同尺度特征的过程中,YOLOv8使用了自适应权重,这些权重可以根据实际情况动态调整,确保对关键信息的充分提取。
## 3.3 YOLOv8的改进技术
### 3.3.1 性能优化的策略
YOLOv8在网络结构和训练过程上都实施了优化策略,以提升模型性能。
**模块化设计:** YOLOv8采用了模块化的设计,这使得网络易于修改和扩展,可以针对特定任务进行微调。
**注意力机制:** 引入注意力机制使得网络能够更加关注图像中的重要区域,从而提高整体的检测性能。
**知识蒸馏:** 使用知识蒸馏技术将大模型的知识转移到小模型中,有助于在保证精度的同时减小模型体积。
### 3.3.2 模型压缩与加速技术
在实际应用中,模型压缩和加速是使YOLOv8更具有应用价值的关键。
**剪枝:** 通过剪枝策略去除冗余的网络结构和权重,从而减少模型的大小并加快推理速度。
**量化:** 对模型的权重和激活进行量化处理,可以在不显著影响性能的情况下,进一步降低模型大小和提高执行速度。
**混合精度训练:** YOLOv8支持混合精度训练,通过使用浮点数的不同精度来加快训练速度并减少内存使用。
**下文将详细探讨YOLOv8的架构与特征提取技术。**
# 4. 行业案例分析与实战演练
## 4.1 行业案例解读
### 4.1.1 智能安防系统中的应用
在智能安防系统中,实时视频监控和异常行为检测是至关重要的功能。YOLOv8在这一领域的应用,能够显著提高检测的准确性和响应速度。YOLOv8通过其高效的网络架构,可以实时地在视频流中识别和分类各类目标,如人员、车辆等,并对可疑行为进行及时预警。
例如,在一个商场的监控系统中,YOLOv8可以用来检测人群密度、滞留时间过长的个人或者遗失物品等行为。这不仅提升了安全管理效率,还极大地降低了人力成本和提高了防范效果。YOLOv8的高效处理能力保证了即便在高分辨率视频和复杂场景中,也能保持较低的延迟和较高的准确度。
### 4.1.2 自动驾驶辅助系统的案例
自动驾驶技术的发展离不开物体检测和跟踪技术的进步。YOLOv8在自动驾驶辅助系统中可以作为一个核心组件,用于实时识别路上的行人、车辆、交通标识等,保证车辆运行的安全性与效率。
通过YOLOv8对路面状况的实时分析,自动驾驶系统能快速做出决策,如转向、制动或加速。在某个场景下,如路口、学校区域等,YOLOv8可以识别出不同的场景,并作出相应的驾驶行为调整,如在学校区域减速,并且提高对行人检测的敏感度。
## 4.2 实战演练:在不同场景下部署YOLOv8
### 4.2.1 数据准备与预处理
在部署YOLOv8进行目标检测之前,数据准备和预处理是关键步骤之一。数据预处理包括数据的收集、标注、格式转换以及增强等过程。
首先,需要根据应用需求收集相应场景下的图片或视频数据。之后,通过标注工具(例如LabelImg)对目标进行准确的标注。标注结果通常以XML或JSON格式保存,与原始图片一起构成训练数据集。
```python
import cv2
import os
# 读取图片
image_path = "path/to/image.jpg"
image = cv2.imread(image_path)
# 图片预处理,例如转换图片格式为YOLOv8需要的格式
processed_image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# 保存预处理后的图片
cv2.imwrite("path/to/processed_image.jpg", processed_image)
```
### 4.2.2 模型训练与参数调优
训练YOLOv8模型需要准备训练脚本,并设置适当的超参数。这包括学习率、批次大小、训练周期数等。超参数的选择依赖于数据集的大小和复杂性,以及计算资源的限制。
在训练过程中,应持续监控模型的损失值和准确度,以调整超参数或提前终止不理想的训练。以下是使用Python脚本训练YOLOv8模型的代码示例:
```python
import torch
# 假设已有一个预训练的YOLOv8模型
model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
# 设置超参数
epochs = 50
lr = 0.001
# 准备训练数据集
train_dataset = "path/to/dataset"
# 训练模型
model.train(data=train_dataset, epochs=epochs, lr=lr)
```
### 4.2.3 模型的部署与性能评估
部署YOLOv8模型到生产环境中,需要选择合适的平台和框架。通常在边缘设备如树莓派或NVIDIA Jetson上运行YOLOv8,可以使用TensorRT、TorchScript等进行模型优化。
部署完成后,进行性能评估至关重要。评估指标包括检测速度(FPS)、准确率、召回率和mAP(平均精度均值)。这些指标可以帮助判断模型是否满足实际应用的需求。
```mermaid
graph LR
A[开始部署YOLOv8] --> B[选择部署平台]
B --> C[模型转换与优化]
C --> D[在目标硬件上测试性能]
D --> E[性能评估]
E --> F{是否满足要求?}
F -->|是| G[部署成功]
F -->|否| H[调整模型/硬件配置]
```
性能评估代码示例:
```python
from yolov8 import YOLOv8Detector
from yolov8.evaluation.metrics import AveragePrecision, MeanAveragePrecision
# 初始化YOLOv8检测器
detector = YOLOv8Detector()
# 在测试集上运行模型
results = detector.detect("path/to/test_dataset")
# 计算mAP
mapCalculator = MeanAveragePrecision()
mAP = mapCalculator(results, "path/to/ground_truth")
print(f"Model mAP: {mAP}")
```
在本小节中,我们通过实际案例,深入了解了YOLOv8在不同行业中的应用,并通过实战演练,详细介绍了如何准备数据、训练和评估YOLOv8模型。这些知识和技能将帮助读者在实际项目中应用YOLOv8,并取得显著成效。
# 5. YOLOv8的未来发展与挑战
## 5.1 YOLOv8的局限性与挑战
### 5.1.1 当前技术的局限性
YOLOv8虽然在性能上取得了显著的提升,但其技术局限性依然存在。首先,虽然YOLOv8在速度和精度上都达到了一定的平衡,但在极端条件下的目标检测依然具有挑战性。例如,在低光环境、恶劣天气条件或者目标遮挡严重的情况下,YOLOv8的准确性可能会受到负面影响。此外,YOLOv8的实时性能在一些高精度需求的场合下仍然不能完全满足,需要更进一步的优化。
### 5.1.2 面临的行业挑战和机遇
从行业的角度来看,YOLOv8在智能安防、自动驾驶、无人机、机器人等众多领域都有着广泛的应用前景。然而,这些行业的应用对算法的鲁棒性、准确性和安全性有着极高的要求。YOLOv8需要不断改进以满足这些严苛的需求。同时,随着技术的不断演进,YOLOv8也需要适应不断变化的技术环境和用户需求,持续更新迭代。此外,随着硬件技术的发展,如专用AI芯片的出现,YOLOv8也需要在保持高性能的同时,更加优化以便在不同硬件平台上高效运行。
## 5.2 技术展望与趋势分析
### 5.2.1 深度学习的未来趋势
深度学习的发展已经深入到各个领域,而未来的发展趋势可以预见将在几个方面展开。首先,随着算法的优化和计算能力的提升,我们预见到深度学习模型将变得更加高效和精确。其次,随着数据隐私和安全意识的提升,本地和边缘计算的深度学习模型将变得越来越重要。此外,自动化机器学习(AutoML)和神经架构搜索(NAS)将会为模型设计和训练带来革新。
### 5.2.2 YOLO系列的潜在发展方向
YOLO系列作为目标检测领域的重要组成部分,其未来发展方向值得期待。在未来的演进中,YOLO可能会加强以下几个方面:首先,YOLOv8可能会融合更多先进的深度学习架构,如Transformer,来进一步提升特征提取的效率和准确性。其次,为了适应更加多样化的应用场景,YOLOv8可能会增加更多的模块化设计,以实现更加灵活的定制化需求。最后,YOLOv8的发展也可能会更注重可持续性和模型的生态构建,如提供更好的开源支持和社区协作平台。
```markdown
| 时间 | 版本 | 关键特性 |
| ----------- | ---- | --------------------------------- |
| 2023年秋 | v8 | 高速度与高精度的平衡 |
| 2024年春 | v9 | 结合Transformer特征提升 |
| 2025年秋 | v10 | 模块化设计与定制化需求的增强 |
| 2026年及以后 | v11+ | 持续优化、AutoML集成、社区生态建设 |
```
上表简要概述了YOLO系列可能的未来版本更新方向和关键特性,显示了YOLO技术发展的路径和潜在的技术革新。YOLOv8作为一个重要里程碑,其后续发展将如何影响整个目标检测领域,值得我们继续观察和期待。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入剖析了 YOLOv8 目标检测算法的特征提取机制,并提供专家级实战教程。通过行业案例和实战指南,专栏揭秘了 YOLOv8 的特征提取技术,并分析了其在对抗样本和模型压缩方面的策略。此外,专栏还详细阐述了 YOLOv8 中的注意力机制和多尺度处理技术,帮助读者全面理解 YOLOv8 的强大性能和广泛应用。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
GT-POWER网格划分技术提升:模型精度与计算效率的双重突破

参考资源链接:[GT-POWER基础培训手册](https://wenku.csdn.net/doc/64a2bf007ad1c22e79951b5
【MAC版SAP GUI快捷键大全】:提升工作效率的黄金操作秘籍

参考资源链接:[MAC版SAP GUI快速安装与配置指南](https://wenku.csdn.net/doc/6412b761be7fbd1778d4a168?spm=1055.2635.3001.10343)
# 1. MAC版SAP GUI简介与安装
## 简介
SAP GUI(Graphical User Interface)是访问SAP系统
【隧道设计必修课】:FLAC3D网格划分与本构模型选择实用技巧
参考资源链接:[FLac3D计算隧道作业](https://wenku.csdn.net/doc/6412b770be7fbd1778d4a4c3?spm=1055.2635.3001.10343)
# 1. FLAC3D简介与应用基础
在本章中,我们将为您介绍FLAC3D(Fast Lagrangian Analysis of Continua in 3 Dimensions)的基础知识以及如何在工程
【故障诊断】:扭矩控制常见问题的西门子1200V90解决方案

参考资源链接:[西门子V90PN伺服驱动参数读写教程](https://wenku.csdn.net/doc/6412b76abe7fbd1778d4a36a?spm=1055.2635.3001.10343)
# 1. 扭矩控制概念与西门子1200V90介绍
在自动化与精密工程领域中,扭矩控制是实现设备精确
【Android设备安全必备】:Unknown PIN问题的彻底解决方案
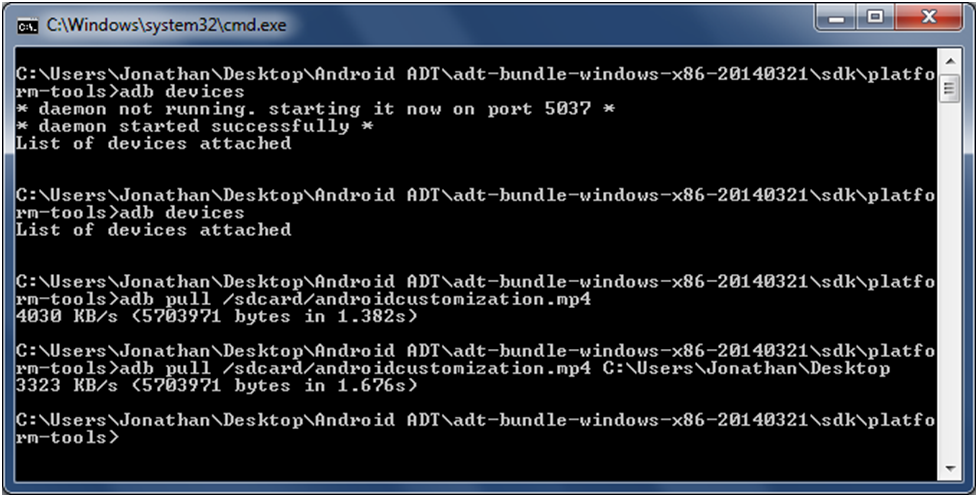
参考资源链接:[unknow PIn解决方案](https://wenku.csdn.net/doc/6412b731be7fbd1778d496d4?spm=1055.2635.3001.10343)
# 1. Unknown PIN问题概述
## 1.1 问题的定义与重要性
Unknown PIN问题通常指用户在忘记或错误输入设备_PIN码后,导致设备锁定,无
【启动速度翻倍】:提升Java EXE应用性能的10大技巧
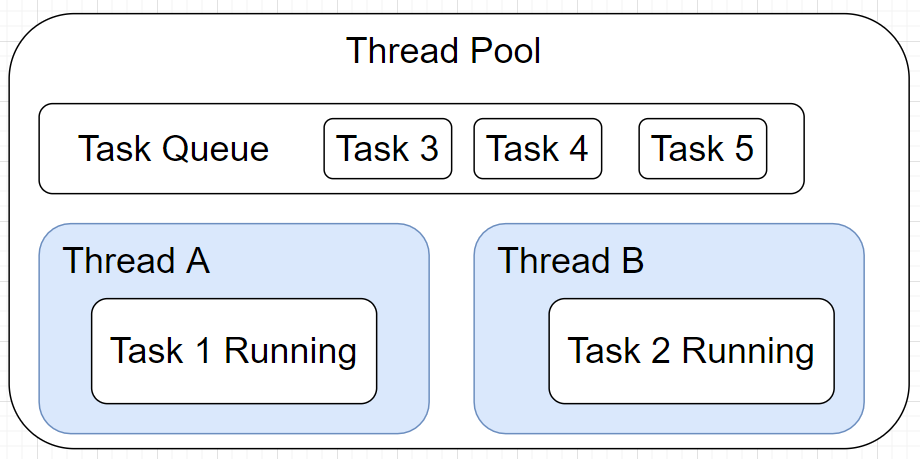
参考资源链接:[Launch4j教程:JAR转EXE全攻略](https://wenku.csdn.net/doc/6401aca7cce7214c316eca53?spm=1055.2635.3001.10343)
# 1. Java EXE应用性能概述
Java作为广泛使用的编程语言,其应用程序的性能直接影响用户体验和系统的稳定性。Java EXE应用是指那些通过特定打包工具(如Launc
Python Requests高级技巧大揭秘:动态请求头与Cookies管理

参考资源链接:[python requests官方中文文档( 高级用法 Requests 2.18.1 文档 )](https://wenku.csdn.net/doc/646c55d4543f844488d076df?spm=1055.2635.3001.10343)
# 1. 动态请求头与Cookies管理基础
## 1.1 互联网通信
iOS实时视频流传输秘籍:构建无延迟的直播系统
参考资源链接:[iOS平台视频监控软件设计与实现——基于rtsp ffmpeg](https://wenku.csdn.net/doc/4tm4tt24ck?spm=1055.2635.3001.10343)
# 1. 实时视频流传输基础
## 1.1 视频流传输的核心概念
- 视频流传输是构建实时直播系统的核心技术之一,涉及到对视频数据的捕捉、压缩、传输和解码等环节。掌握这些基本概念对于实现高质量
【绘制软件大比拼】:AutoCAD与其它工具在平断面图中的真实对决

参考资源链接:[输电线路设计必备:平断面图详解与应用](https://wenku.csdn.net/doc/6dfbvqeah6?spm=1055.2635.3001.10343)
# 1. 绘制软件大比拼概览
绘制软件领域竞争激烈,为满足不同用户的需求,各种工具应运而生。本章将为读者提供一个概览,介绍市场上流行的几款绘制软件及其主要功能,帮助您快速了解每款软件
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )