SPI Timing Diagram Analysis: How to Understand the Timing Requirements of SPI Communication
发布时间: 2024-09-14 02:15:29 阅读量: 55 订阅数: 32 

Static Timing analysis for Nanometer Design : A practical approa
# Chapter 1: Introduction
## 1.1 Overview of SPI Communication
SPI (Serial Peripheral Interface) communication is a synchronous serial communication protocol used for communication interactions between digital integrated circuits. SPI communication transfers data through a pair of data lines (MOSI, MISO) and a pair of control lines (SCLK, SS). The principle is to communicate through a master-slave model, where the master device controls the communication timing and data transfer, and the slave device responds.
SPI communication is characterized by high-speed, simple implementation, and strong flexibility, making it suitable for scenarios that require high speed and small data volume. It is widely used in automotive electronics, industrial control, communication equipment, and other fields.
The features of SPI communication include full-duplex communication, adjustable clock polarity and phase, and support for multiple slave devices, providing a stable and reliable communication mechanism for various systems and devices.
# Chapter 2: SPI Timing Analysis
## 2.1 SPI Communication Timing Requirements
There are several key timing requirements that need to be met when performing SPI communication, including clock polarity, clock phase, data transfer mode, and frame format. These requirements are crucial for the stability and accuracy of communication.
- **Clock Polarity:** Clock polarity determines when data is sampled, which can be either a low level during idle state and then rising to a high level, or a high level during idle state and then falling to a low level.
- **Clock Phase:** Clock phase indicates when data should be sampled, which can be on the rising or falling edge of the clock.
- **Data Transfer Mode:** SPI communication can be in full-duplex or half-duplex mode. In full-duplex mode, data can be transferred simultaneously on both the MOSI and MISO lines; in half-duplex mode, transmission is only one-way.
- **Frame Format:** Typically, SPI communication follows the MSB (Most Significant Bit) first frame format, meaning the most significant bits are sent first.
## 2.2 SPI Communication Timing Diagrams
To better understand the timing of SPI communication, we will introduce the timing diagrams for master-slave mode and multi-master mode.
### 2.2.1 Master-Slave Mode Timing Diagram
```mermaid
sequenceDiagram
participant Master
participant Slave
Master->>Slave: Send Data
Slave->>Master: Receive Data
```
In master-slave mode, communication begins with the master sending data, and the slave receiving data. The master device is usually a controller or processor, while the slave can be a sensor or memory.
### 2.2.2 Multi-Master Mode Timing Diagram
```mermaid
graph LR
A(Master 1) -->|Send Data| B(Slave)
B -->|Send Data| C(Master 2)
C -->|Send Data| B
```
In multi-master mode, multiple master devices can communicate with one or more slave devices. Masters need to coordinate data transmission via a bus protocol to avoid conflicts and data loss.
With the introduction of these timing requirements and diagrams, the timing control and data transfer process in SPI communication can be understood more clearly.
# Chapter 3: SPI Timing Parameters
## 3.1 Clock Frequency
Clock frequency is a critical parameter in SPI communication, directly affecting the speed of data transfer and the stability of communication. Specifically, clock frequency refers to the number of clock pulses sent per second, usually expressed in Hz. In SPI communication, the higher the clock frequency, the faster the data transfer speed, but it also increases the complexity of the communication system and the risk of interference.
### 3.1.1 Method for Calculating Maximum Clock Frequency
In practical applications, to ensure the reliability of communication, we need to calculate the maximum clock frequency ***mon calculation methods include considering factors such as the length of the transmission line, signal attenuation, and crosstalk to determine the maximum clock frequency the system can support.
### 3.1.2 Relationship Between Clock Frequency and Communication Distance
There is a certain relationship between clock frequency and communication distance. Generally, as the communication distance increases, the clock frequency needs to be appropriately reduced to ensure the stability of data transfer. This is because, in long-distance communication, signal transmission experiences loss and attenuation, and a high clock frequency may lead to signal distortion, thus affecting the reliability of communication.
## 3.2 Clock Period
The clock period refers to the duration of a complete clock signal cycle, usually measured in nanoseconds (ns). In SPI communication, the clock period affects the accuracy and stability of data transfer. A shorter clock period allows for a higher clock frequency, but the response time and data processing capabilities of the device also need to be considered.
### 3.2.1 Clock Period Calculation Formula
The clock period can be obtained by taking the reciprocal of the clock frequency, i.e., Clock Period = 1 / Clock Frequency. For example, when the clock frequency is 10MHz, the corresponding clock period is 0.1μs (100ns).
### 3.2.2 Relationship Between Clock Period and Communication Rate
The communication rate refers to the number of data bits transferred per second, usually expressed in bits per second (bps). In SPI communication, there is an inverse relationship between the clock period and the communication rate, i.e., the shorter the clock period, the higher the communication rate. Therefore, when designing an SPI communication system, it is necessary to select an appropriate clock period based on communication needs and device performance.
### Example Table: SPI Clock Frequencies and Corresponding Clock Periods
| Clock Frequency | Clock Period |
|----------------|----------------|
| 10MHz | 0.1μs (100ns) |
| 20MHz | 0.05μs (50ns) |
| 50MHz | 0.02μs (20ns) |
| 100MHz | 0.01μs (10ns) |
### Example Flowchart: Relationship Between Clock Frequency and Communication Distance
```mermaid
graph TB
A[Increase in Communication Distance] --> B[Reduce Clock Frequency]
B --> C[Improve Data Transfer Stability]
```
This is an analysis and calculation method of important parameters such as clock frequency and clock period in SPI communication. By reasonably selecting and designing these parameters, the performance and stability of the SPI communication system can be optimized.
# Chapter 4: SPI Timing Design
## 4.1 Selecting an Appropriate Clock Frequency
Selecting the appropriate clock frequency is crucial for SPI communication. When designing SPI timing, it is necessary to comprehensively consider the overall system clock frequency, the coordination of clock frequencies between modules, and the clock frequency tolerance of the devices. First, ensure that the highest clock frequency supported by the devices does not exceed the capabilities of the system bus to avoid communication errors or data loss.
When communicating between modules, pay attention to the matching of clock frequencies between modules to avoid communication failure due to incompatible clock frequencies. At the same time, consider the clock frequency tolerance of the devices and choose a suitable clock frequency within the device frequency range. Through careful selection of the clock frequency, the stability and reliability of SPI communication can be ensured.
## 4.2 Optimizing Clock Routing
Optimizing clock routing is one of the key steps to improve the quality of SPI communication. In design, it is necessary to reasonably plan the transmission path of the clock signal, avoiding interference or attenuation of the clock signal. To ensure stable transmission of the clock signal, some measures can be taken, such as increasing the distance between ground and power lines, reducing the length of the clock signal transmission path, and reducing the crosstalk effect during transmission.
In addition, to eliminate interference in the clock signal, measures such as using shield covers, differential transmission lines, and routing specifications can be adopted. By optimizing clock routing, the stability and anti-interference capability of SPI communication can be effectively improved.
## 4.3 Adjusting Data Transmission Parameters
Adjusting data transmission parameters is an important part of optimizing SPI timing design. By reasonably setting the data transmission frequency, optimizing data transmission delay, and performing data transmission stability testing, the efficiency and reliability of SPI communication can be improved.
When setting the data transmission frequency, it is necessary to determine the appropriate transmission frequency based on the needs of the system and the specifications of the devices, avoiding exceeding the transmission capacity of the devices. Optimizing the data transmission delay can shorten the data transmission time and improve communication efficiency. Through data transmission stability testing, it can be ensured that SPI communication works properly under different operating conditions, improving the stability and reliability of the system.
In SPI timing design, selecting an appropriate clock frequency, optimizing clock routing, and adjusting data transmission parameters are key steps that can effectively improve the stability and reliability of SPI communication. With careful design and adjustment, SPI communication can perform excellently in practical applications, meeting the needs of the system.
# Chapter 5: Conclusion
In this article, we have delved into the fundamental concepts of SPI communication, timing analysis, timing parameters, and timing design. Through a detailed study of SPI communication timing, we can better understand and design SPI communication systems, ensuring the stability and reliability of the system. In this chapter, we will summarize the full text and discuss the development trends of SPI communication.
#### 5.1 Summary Points
In the previous chapters of this article, we introduced the basic concepts of SPI communication, including the definition, principles, features, and application areas of SPI communication. We also deeply analyzed the timing requirements of SPI communication, including clock polarity, clock phase, data transfer mode, and frame format. At the same time, we discussed in detail the calculation methods and influencing factors of timing parameters, such as clock frequency, clock period, and data transmission delay. Finally, in terms of timing design, we proposed suggestions such as selecting an appropriate clock frequency, optimizing clock routing, and adjusting data transmission parameters.
Through the study of this article, we can draw the following key points:
- SPI communication is a synchronous serial communication protocol suitable for high-speed data transmission over short distances.
- The timing requirements of SPI communication are strict, including settings for parameters such as clock polarity and clock phase.
- Clock frequency, clock period, and data transmission delay are important factors affecting the performance of SPI communication.
- When designing SPI communication systems, it is necessary to consider the overall clock frequency, optimization of clock routing, and adjustments to data transmission parameters.
#### 5.2 Development Trends
With the development of the Internet of Things, artificial intelligence, and other fields, the requirements for communication systems are becoming increasingly high. As a high-speed, full-duplex communication protocol, SPI has widespread applications in various fields. In the future, SPI communication is expected to further develop in the following aspects:
1. **Higher Clock Frequency:** As technology advances, the clock frequency of SPI communication systems will continue to increase to meet the needs of faster data transmission.
2. **Lower Power Consumption Design:** For low-power applications such as mobile devices and wireless sensor networks, SPI communication systems will tend to design for lower power consumption.
3. **Smarter Data Transmission Methods:** With the development of artificial intelligence technology, SPI communication systems will become more intelligent, achieving more efficient data transmission and processing.
In summary, as an important communication protocol, SPI will play an increasingly important role in future development. We need to continuously learn and study to better meet the challenges of future communication systems.
Through the study of this article, I believe readers have gained a deeper understanding of SPI communication. I hope this article can provide assistance in the design and application of SPI communication systems. I wish everyone success in future projects!

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
OrcaFlex案例分析:10个海洋工程设计难题与实战解决方案

# 摘要
本文介绍了OrcaFlex软件在海洋工程设计中的应用背景及其解决实际工程问题的能力。文章首先概述了海洋工程设计的基础理论,包括设计原则、动力学模型、环境载荷分析等。随后,通过一系列实践案例,如深水立管设计、浮式生
【工业齿轮箱设计实战】:KISSsoft应用案例全解析(实例剖析与技术要点)

# 摘要
齿轮箱作为工业设备的关键部件,其设计质量直接影响到整个系统的性能和寿命。本文从工业齿轮箱设计的基础知识出发,介绍了KISSsoft软件的
正态分布的电工程解码:如何运用到滤波器设计与系统可靠性(专家指南)

# 摘要
本文综合探讨了正态分布在电力工程中的基础理论与应用实践。首先介绍了正态分布的基本概念,并概述了其在电力工程中的基础作用。随后深入分析了正态分布如何应用于滤波器设计,特别是在优化滤波器性能方面的作用。接着,本文探讨了正态分布与系统可靠性的关系,以及如何利用正态分布进行失效预测和提高系统可靠性。在数据分析方面,文章详细阐述了基于正态分布的数据分析方法及其在电力工程中的应用案例。最
【C++ Builder 6.0 开发工作站打造指南】:环境配置不再迷茫
# 摘要
本文深入探讨了C++ Builder 6.0开发环境及其配置、功能模块、高级开发技术和应用实践。首先概述了C++ Builder 6.0的特点,并详细介绍了其安装、配置方法,包括系统要求、安装步骤、环境变量设置和工作空间项目设置。接着,本文介绍了集成开发环境(IDE)的使用、编译器与调试器的配置,以及VCL组件库与自定义组件的开发。
多媒体格式转换秘籍:兼容性与效率的双重胜利

# 摘要
多媒体格式转换是数字媒体处理的重要组成部分,涉及从一种媒体格式到另一种格式的转换,这包括音频和视频格式。本文首先介绍多媒体格式转换的基本概念和编码理论,随后探讨了不同格式转换工具的选择和使用技巧,以及在转换实践中的效率和质量控制方法。接着,文章深入分析了硬件加速和分布式处理在提升转换性能方面的技术。最后,本文展望了多媒体格式转换技术的未来趋势,重点讨论
【MATLAB数据转换】:5分钟掌握CSV到FFT的高效处理技巧
# 摘要
本文首先介绍了MATLAB的基本概念以及在数据分析中进行数据转换的必要性。然后,重点讲解了如何在MATLAB中读取和预处理CSV格式的数据,
深入LIN总线:数据包格式与消息调度机制
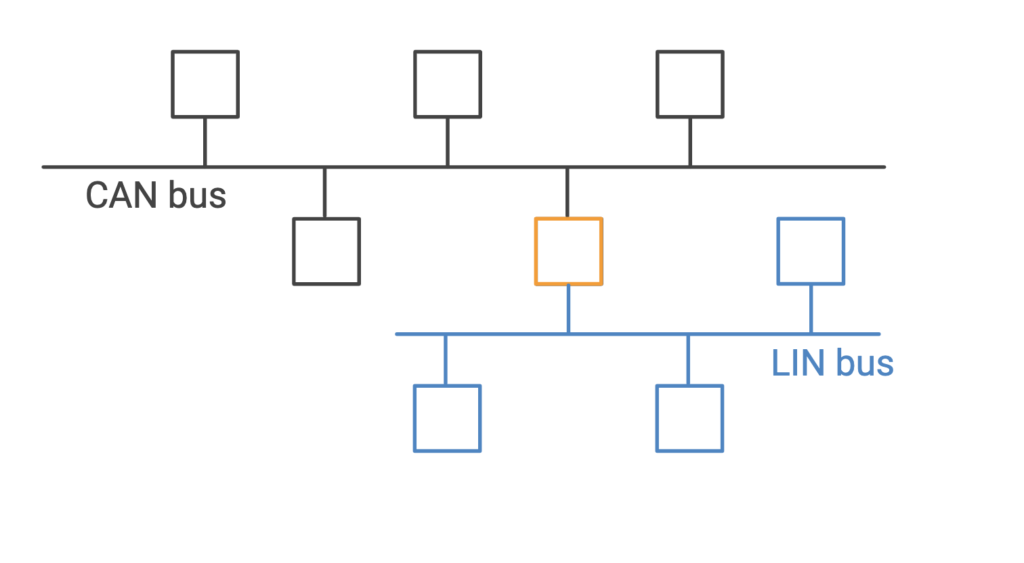
# 摘要
LIN总线技术作为一种用于车辆内部网络的低成本通信系统,近年来在汽车行业中得到了广泛应用。本文首先概述了LIN总线的基本概念及其数据包格式,深入解析了LIN数据帧的结构和传输机制,并讨论了调度策略和优先级管理。随后,文章详细探讨了LIN总线的物理层特性,包括电气特性、接口连接和网络拓扑结构。在此基础
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )