揭秘单片机交通灯控制系统:从原理到实现的全面指南
发布时间: 2024-07-12 18:40:17 阅读量: 69 订阅数: 45 

单片机交通灯控制程序和设计原理

# 1. 交通灯控制系统概述**
交通灯控制系统是一种电子控制系统,用于管理道路交通。它通过控制交通灯的开关,协调车辆和行人的通行,保证交通安全和顺畅。
单片机交通灯控制系统是一种基于单片机的交通灯控制系统。单片机是一种微型计算机,它将中央处理器、存储器和输入/输出接口集成在一个芯片上。单片机交通灯控制系统具有体积小、功耗低、成本低等优点,广泛应用于道路交通管理中。
# 2. 单片机交通灯控制原理
### 2.1 交通灯控制算法
交通灯控制算法是交通灯控制系统中至关重要的部分,它决定了交通灯的切换顺序和时间分配。常见的交通灯控制算法包括:
- **固定时间控制算法:**根据预先设定的时间间隔,固定各相位的绿灯时间。优点是简单易行,但无法适应交通流量的变化。
- **感应控制算法:**使用感应器检测交通流量,根据实时交通情况调整绿灯时间。优点是能提高交通效率,但需要较高的硬件成本。
- **自适应控制算法:**结合固定时间控制和感应控制算法,根据历史数据和实时交通情况动态调整绿灯时间。优点是能兼顾效率和成本。
### 2.2 单片机硬件组成
单片机交通灯控制系统主要由以下硬件组成:
- **单片机:**作为系统的核心,负责控制交通灯的切换和处理各种信号。
- **时钟模块:**提供准确的时间基准,用于控制绿灯时间。
- **I/O 接口:**用于连接外部设备,如按钮、传感器和指示灯。
- **电源模块:**为系统供电。
### 2.3 单片机软件设计
单片机软件设计包括以下步骤:
- **需求分析:**确定系统功能和性能要求。
- **算法设计:**选择合适的交通灯控制算法。
- **程序设计:**使用 C 语言或汇编语言编写程序,实现算法和控制逻辑。
- **调试:**通过仿真或实机调试,消除程序中的错误。
**代码块:**
```c
// 初始化时钟模块
void init_timer() {
// 设置时钟频率
TCCR0 = 0x01;
// 设置定时器溢出时间
OCR0 = 255;
// 启用定时器中断
TIMSK |= (1 << OCIE0);
}
// 定时器中断服务程序
ISR(TIMER0_OVF_vect) {
// 清除中断标志位
TIFR |= (1 << OCF0);
// 更新交通灯状态
update_traffic_light();
}
```
**逻辑分析:**
* `init_timer()` 函数初始化时钟模块,设置时钟频率、定时器溢出时间并启用定时器中断。
* `ISR(TIMER0_OVF_vect)` 是定时器中断服务程序,当定时器溢出时触发。
* 中断服务程序中,清除中断标志位并调用 `update_traffic_light()` 函数更新交通灯状态。
**参数说明:**
* `TCCR0`:时钟控制寄存器,用于设置时钟频率。
* `OCR0`:输出比较寄存器,用于设置定时器溢出时间。
* `TIMSK`:定时器中断屏蔽寄存器,用于启用定时器中断。
* `TIFR`:定时器中断标志寄存器,用于清除中断标志位。
# 3. 单片机交通灯控制实现
### 3.1 硬件电路设计
#### 3.1.1 单片机选型
单片机是交通灯控制系统的核心,其性能直接影响系统的稳定性和可靠性。在选择单片机时,需要考虑以下因素:
- **处理能力:**单片机需要能够实时处理交通信号的切换,因此需要选择具有足够处理能力的单片机。
- **I/O 口数量:**单片机需要控制多个交通灯,因此需要选择具有足够 I/O 口数量的单片机。
- **价格:**单片机的价格应与系统的成本要求相匹配。
常见的用于交通灯控制的单片机有:
| 单片机型号 | 处理器 | I/O 口数量 | 价格 |
|---|---|---|---|
| STM32F103C8T6 | ARM Cortex-M3 | 32 | 低 |
| ATmega328P | AVR | 26 | 超低 |
| MSP430G2553 | MSP430 | 20 | 低 |
#### 3.1.2 外围电路设计
交通灯控制系统需要一些外围电路来支持单片机的功能,包括:
- **电源电路:**为单片机和外围电路供电。
- **复位电路:**在系统上电或复位时复位单片机。
- **LED 驱动电路:**驱动交通灯的 LED 灯。
- **按键电路:**用于手动控制交通灯。
- **传感器电路:**用于检测车辆或行人的存在。
外围电路的设计应遵循以下原则:
- **稳定性:**外围电路应稳定可靠,以确保单片机系统的正常运行。
- **低功耗:**外围电路应尽可能低功耗,以延长系统的电池寿命。
- **易于维护:**外围电路应易于维护和更换。
### 3.2 软件编程实现
#### 3.2.1 程序流程设计
交通灯控制系统的程序流程一般如下:
1. **初始化:**初始化单片机、外围电路和变量。
2. **检测:**检测车辆或行人的存在。
3. **判断:**根据检测结果判断当前交通信号的状态。
4. **切换:**根据判断结果切换交通信号。
5. **循环:**重复步骤 2-4,实现交通信号的循环切换。
#### 3.2.2 代码编写与调试
以下是用 C 语言编写的交通灯控制程序示例:
```c
#include <stdio.h>
#include <stdlib.h>
// 定义交通信号状态
#define RED 0
#define YELLOW 1
#define GREEN 2
// 定义 I/O 口
#define RED_LED_PORT PORTB
#define RED_LED_PIN 0
#define YELLOW_LED_PORT PORTB
#define YELLOW_LED_PIN 1
#define GREEN_LED_PORT PORTB
#define GREEN_LED_PIN 2
// 定义传感器 I/O 口
#define SENSOR_PORT PORTD
#define SENSOR_PIN 2
// 定义延时函数
void delay(int ms) {
for (int i = 0; i < ms * 1000; i++) {
asm("nop");
}
}
// 主函数
int main() {
// 初始化 I/O 口
DDRB |= (1 << RED_LED_PIN) | (1 << YELLOW_LED_PIN) | (1 << GREEN_LED_PIN);
DDRD &= ~(1 << SENSOR_PIN);
// 初始化变量
int state = RED;
// 主循环
while (1) {
// 检测传感器
if (PIND & (1 << SENSOR_PIN)) {
// 车辆或行人存在
state = (state + 1) % 3;
}
// 切换交通信号
switch (state) {
case RED:
PORTB = (1 << RED_LED_PIN);
break;
case YELLOW:
PORTB = (1 << YELLOW_LED_PIN);
break;
case GREEN:
PORTB = (1 << GREEN_LED_PIN);
break;
}
// 延时
delay(1000);
}
return 0;
}
```
**代码逻辑分析:**
- **初始化:**初始化 I/O 口、变量和延时函数。
- **主循环:**不断循环执行以下步骤:
- 检测传感器。
- 根据检测结果判断当前交通信号的状态。
- 根据判断结果切换交通信号。
- 延时。
- **切换交通信号:**使用 switch 语句根据当前交通信号的状态切换交通信号。
- **延时:**使用 delay 函数延时 1 秒,以控制交通信号切换的频率。
# 4. 单片机交通灯控制优化**
**4.1 性能优化**
**4.1.1 代码优化**
* **循环优化:**使用 for 循环代替 while 循环,提高执行效率。
* **变量类型优化:**使用合适的变量类型(如 int、short、char),减少内存占用。
* **常量使用:**将经常使用的值定义为常量,避免重复计算。
* **函数内联:**将小型函数内联到调用处,减少函数调用开销。
**代码块:**
```c
// 未优化代码
while (i < 100) {
// ...
}
// 优化后代码
for (int i = 0; i < 100; i++) {
// ...
}
```
**逻辑分析:**
循环优化将 while 循环转换为 for 循环,明确了循环范围,提高了执行效率。
**参数说明:**
* i:循环变量
**4.1.2 硬件优化**
* **使用高速时钟:**提高单片机时钟频率,加快指令执行速度。
* **增加内存:**增加 RAM 或 ROM 容量,减少频繁的内存访问。
* **优化外围电路:**选择合适的晶振、电容和电阻,提高外围电路稳定性和性能。
**表格:**
| 优化措施 | 影响 |
|---|---|
| 使用高速时钟 | 提高指令执行速度 |
| 增加内存 | 减少频繁的内存访问 |
| 优化外围电路 | 提高外围电路稳定性和性能 |
**4.2 可靠性优化**
**4.2.1 故障检测与处理**
* **看门狗定时器:**定期复位单片机,防止程序死循环。
* **错误码检测:**在关键代码段设置错误码,及时发现和处理错误。
* **自检程序:**定期执行自检程序,检测硬件和软件故障。
**mermaid流程图:**
```mermaid
graph LR
subgraph 故障检测与处理
A[看门狗定时器] --> B[错误码检测] --> C[自检程序]
end
```
**逻辑分析:**
故障检测与处理流程图展示了故障检测和处理机制。看门狗定时器定期复位单片机,错误码检测在关键代码段设置错误码,自检程序定期执行自检,确保系统可靠性。
**4.2.2 冗余设计**
* **双重控制:**使用两个单片机同时控制交通灯,提高系统容错性。
* **备份电源:**使用备用电源,防止主电源故障导致系统中断。
* **冗余传感器:**使用多个传感器检测交通流量,避免单点故障。
**代码块:**
```c
// 双重控制代码示例
if (单片机1_状态 == 故障) {
单片机2_控制();
}
```
**逻辑分析:**
双重控制代码示例展示了在单片机1故障时,系统切换到单片机2进行控制,提高了系统容错性。
# 5. 单片机交通灯控制应用案例
### 5.1 十字路口交通灯控制
十字路口是交通流量最密集的区域,交通灯控制至关重要。单片机交通灯控制系统可以根据实时交通状况,动态调整交通灯配时,提高通行效率。
**实现步骤:**
1. **交通流量采集:**使用传感器采集十字路口各方向的交通流量数据。
2. **交通灯配时计算:**根据交通流量数据,采用算法计算最优的交通灯配时方案。
3. **单片机控制:**单片机根据计算出的配时方案,控制交通灯的开关。
**优化措施:**
* **自适应配时:**根据实时交通流量变化,动态调整交通灯配时,提高通行效率。
* **优先级控制:**对公共汽车、救护车等特殊车辆设置优先级,缩短等待时间。
### 5.2 人行横道交通灯控制
人行横道交通灯控制旨在保障行人安全。单片机系统可以根据行人需求,触发交通灯变为绿灯。
**实现步骤:**
1. **行人按钮检测:**当行人按下按钮时,单片机检测到信号。
2. **交通灯控制:**单片机根据行人按钮信号,触发交通灯变为绿灯,允许行人通行。
3. **计时控制:**单片机计时行人通行时间,并在时间结束后恢复交通灯正常配时。
**优化措施:**
* **感应式控制:**使用感应器检测行人,当行人靠近时自动触发交通灯变为绿灯。
* **可调式计时:**允许管理员根据实际情况调整行人通行时间。
### 5.3 智能交通灯控制
智能交通灯控制利用物联网、大数据等技术,实现更加智能化的交通管理。
**实现步骤:**
1. **交通数据采集:**通过传感器、摄像头等设备采集交通流量、天气、事故等数据。
2. **大数据分析:**利用大数据技术分析交通数据,识别交通模式和瓶颈。
3. **优化算法:**根据分析结果,采用优化算法计算最优的交通灯配时方案。
4. **云端控制:**将优化后的配时方案推送到云端,并通过网络控制交通灯。
**优化措施:**
* **实时监控:**通过云端平台实时监控交通状况,及时发现和处理突发事件。
* **交通预测:**利用历史数据和实时数据,预测未来交通流量,提前优化交通灯配时。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨单片机交通灯控制系统,涵盖了从原理到实现、性能优化、智能城市应用、设计与仿真、实时监控、交叉路口应用、智能停车场协同以及交通诱导系统集成的各个方面。通过深入剖析系统的工作原理和实现,提供解决常见问题的实用指南。专栏还重点介绍了单片机交通灯控制系统在提升交通效率、优化交通执法、打造智慧停车生态以及引导交通流优化等方面的应用。通过理论与实践相结合的方式,本专栏旨在帮助读者深入了解单片机交通灯控制系统,并将其应用于现实世界的交通管理场景中,实现协同管理、提高交通效率和提升交通执法效率。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
IPMI标准V2.0与物联网:实现智能设备自我诊断的五把钥匙
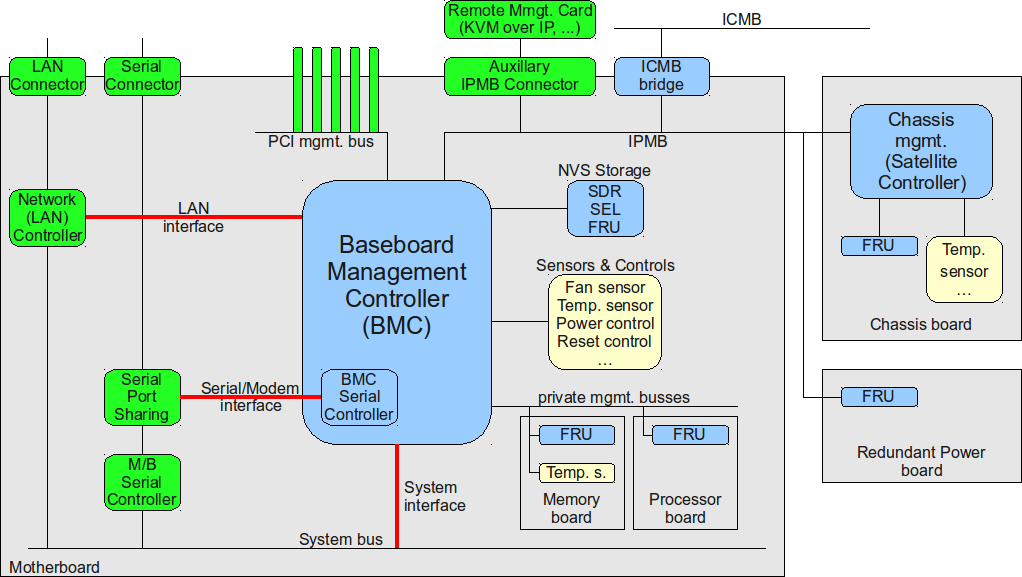
# 摘要
本文旨在深入探讨IPMI标准V2.0在现代智能设备中的应用及其在物联网环境下的发展。首先概述了IPMI标准V2.0的基本架构和核心理论,重点分析了其安全机制和功能扩展。随后,本文讨论了物联网设备自我诊断的必要性,并展示了IPMI标准V2.0在智能硬件设备和数据中心健康管理中的应用实例。最后,本文提出了实现智能设备IPMI监控系统的设计与开发指南,
【EDID兼容性高级攻略】:跨平台显示一致性的秘诀

# 摘要
电子显示识别数据(EDID)是数字视频接口中用于描述显示设备特性的标准数据格式。本文全面介绍了EDID的基本知识、数据结构以及兼容性问题的诊断与解决方法,重点关注了数据的深度解析、获取和解析技术。同时,本文探讨了跨平台环境下EDID兼容性管理和未来技术的发展趋势,包括增强型EDID标准的发展和自动化配置工具的前景。通过案例研究与专家建议,文章提供了在多显示器设置和企业级显示管理中遇到的ED
PyTorch张量分解技巧:深度学习模型优化的黄金法则

# 摘要
PyTorch张量分解技巧在深度学习领域具有重要意义,本论文首先概述了张量分解的概念及其在深度学习中的作用,包括模型压缩、加速、数据结构理解及特征提取。接着,本文详细介绍了张量分解的基础理论,包括其数学原理和优化目标,随后探讨了在PyTorch中的操作实践,包括张量的创建、基本运算、分解实现以及性能评估。论文进一步深入分析了张量分解在深度学习模型中的应用实例,展示如何通过张量分解技术实现模型
【参数校准艺术】:LS-DYNA材料模型方法与案例深度分析
# 摘要
本文全面探讨了LS-DYNA软件在材料模型参数校准方面的基础知识、理论、实践方法及高级技术。首先介绍了材料模型与参数校准的基础知识,然后深入分析了参数校准的理论框架,包括理论与实验数据的关联以及数值方法的应用。文章接着通过实验准备、模拟过程和案例应用详细阐述了参数校准的实践方法。此外,还探
系统升级后的验证:案例分析揭秘MAC地址修改后的变化
# 摘要
本文系统地探讨了MAC地址的基础知识、修改原理、以及其对网络通信和系统安全性的影响。文中详细阐述了软件和硬件修改MAC地址的方法和原理,并讨论了系统升级对MAC地址可能产生的变化,包括自动重置和保持不变的情况。通过案例分析,本文进一步展示了修改MAC地址后进行系统升级的正反两面例子。最后,文章总结了当前研究,并对今后关于MAC地址的研究方向进行了展望。
# 关键字
华为交换机安全加固:5步设置Telnet访问权限
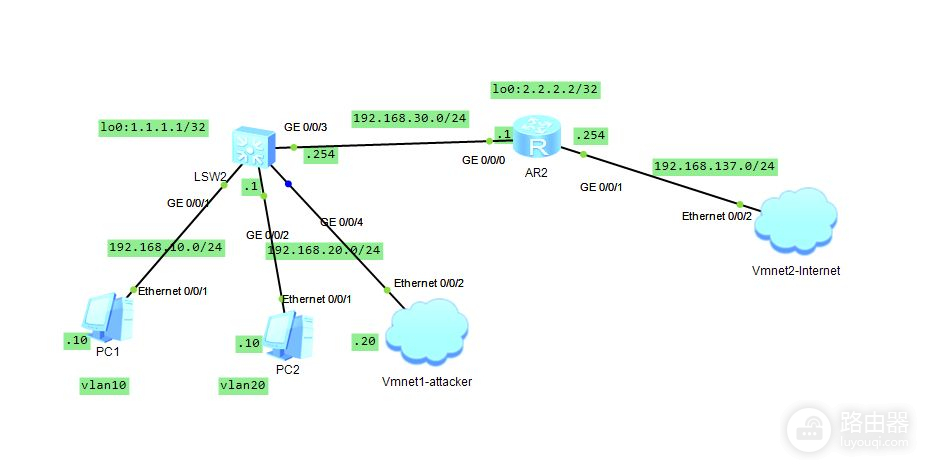
# 摘要
随着网络技术的发展,华为交换机在企业网络中的应用日益广泛,同时面临的安全威胁也愈加复杂。本文首先介绍了华为交换机的基础知识及其面临的安全威胁,然后深入探讨了Telnet协议在交换机中的应用以及交换机安全设置的基础知识,包括用户认证机制和网络接口安全。接下来,文章详细说明了如何通过访问控制列表(ACL)和用户访问控制配置来实现Telnet访问权限控制,以增强交换机的安全性。最后,通过具体案例分析,本文评估了安
【软硬件集成测试策略】:4步骤,提前发现并解决问题

# 摘要
软硬件集成测试是确保产品质量和稳定性的重要环节,它面临诸多挑战,如不同类型和方法的选择、测试环境的搭建,以及在实践操作中对测试计划、用例设计、缺陷管理的精确执行。随着技术的进步,集成测试正朝着性能、兼容性和安全性测试的方向发展,并且不断优化测试流程和数据管理。未来趋势显示,自动化、人工智能和容器化等新兴技术的应用,将进一步提升测试效率和质量。本文系统地分析了集成测试的必要性、理论基础、实践操作
CM530变频器性能提升攻略:系统优化的5个关键技巧
# 摘要
本文综合介绍了CM530变频器在硬件与软件层面的优化技巧,并对其性能进行了评估。首先概述了CM530的基本功能与性能指标,然后深入探讨了硬件升级方案,包括关键硬件组件选择及成本效益分析,并提出了电路优化和散热管理的策略。在软件配置方面,文章讨论了软件更新流程、固件升级准备、参数调整及性能优化方法。系统维护与故障诊断部分提供了定期维护的策略和故障排除技巧。最后,通过实战案例分析,展示了CM530在特定应用中的优化效果,并对未来技术发展和创新
CMOS VLSI设计全攻略:从晶体管到集成电路的20年技术精华
# 摘要
本文对CMOS VLSI设计进行了全面概述,从晶体管级设计基础开始,详细探讨了晶体管的工作原理、电路模型以及逻辑门设计。随后,深入分析了集成电路的布局原则、互连设计及其对信号完整性的影响。文章进一步介绍了高级CMOS电路技术,包括亚阈值电路设计、动态电路时序控制以及低功耗设计技术。最后,通过VLSI设计实践和案例分析,阐述了设计流程、
三菱PLC浮点数运算秘籍:精通技巧全解

# 摘要
本文系统地介绍了三菱PLC中浮点数运算的基础知识、理论知识、实践技巧、高级应用以及未来展望。首先,文章阐述了浮点数运算的基础和理论知识,包括表示方法、运算原理及特殊情况的处理。接着,深入探讨了三菱PLC浮点数指令集、程序设计实例以及调试与优化方法。在高级应用部分,文章分析了浮点数与变址寄存器的结合、高级算法应用和工程案例。最后,展望了三菱PLC浮点数运算技术的发展趋势,以及与物联网的结合和优化
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )