OpenCV中的边缘检测算法介绍
发布时间: 2024-02-25 14:04:23 阅读量: 52 订阅数: 27 
# 1. Introduction to Edge Detection
## 1.1 What is Edge Detection
Edge detection is a fundamental technique in image processing and computer vision that aims to identify the boundaries of objects within an image. These boundaries, known as edges, represent significant changes in pixel intensity and are crucial for tasks such as object recognition, image segmentation, and feature extraction.
## 1.2 Importance of Edge Detection in Computer Vision
The accurate detection of edges plays a vital role in various computer vision applications. By detecting edges, we can extract important features from an image, which can then be used for object detection, tracking, and classification. Edge detection also helps in reducing the complexity of an image while preserving essential information, making subsequent processing tasks more efficient.
## 1.3 Overview of Edge Detection Algorithms
There are numerous edge detection algorithms, each with its strengths and weaknesses. Some of the popular algorithms include the Canny edge detector, Sobel operator, Prewitt operator, and Laplacian operator. These algorithms employ different techniques to highlight edges in an image, and understanding their characteristics is essential for choosing the most suitable method based on the application requirements.
# 2. Basic Concepts of OpenCV
OpenCV (Open Source Computer Vision Library) is an open-source computer vision and machine learning software library. It provides a wide range of tools and algorithms for image processing, computer vision, and machine learning. In this chapter, we will delve into the basic concepts of OpenCV, including its definition, installation and setup process, as well as understanding the image processing functions it offers.
### 2.1 What is OpenCV
OpenCV is a powerful library that was originally developed by Intel in 1999 and has since been maintained by Willow Garage and Itseez. It is written in C++ and designed to be cross-platform, making it suitable for use on different operating systems such as Windows, Linux, and macOS. Apart from C++, OpenCV also provides interfaces for popular programming languages like Python, Java, and MATLAB.
### 2.2 Installation and Setup
Installing OpenCV can sometimes be a challenging task due to the various dependencies it requires. However, thanks to package managers like pip (for Python) and apt-get (for Ubuntu), the installation process has been streamlined. For example, to install OpenCV for Python using pip, you can use the following command:
```bash
pip install opencv-python
```
It is also recommended to install the additional OpenCV-contrib package which includes extra modules and features:
```bash
pip install opencv-contrib-python
```
For a more customized installation, compiling from the source code is also an option. Detailed instructions can be found on the official OpenCV documentation.
### 2.3 Understanding OpenCV Image Processing Functions
OpenCV offers a wide range of image processing functions that can be used for tasks such as image filtering, convolution, edge detection, and more. Some of the common functions include cv2.imread() for reading images, cv2.imshow() for displaying images, cv2.cvtColor() for converting images to different color spaces, and cv2.imwrite() for saving images.
Below is a simple example of loading an image using OpenCV in Python:
```python
import cv2
# Load an image
image = cv2.imread('image.jpg')
# Display the image
cv2.imshow('Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
In this example, the image.jpg file is loaded using cv2.imread() and displayed using cv2.imshow(). The cv2.waitKey(0) function waits for a key event, and cv2.destroyAllWindows() closes all open windows.
Understanding these fundamental concepts of OpenCV is crucial for working with images and implementing various computer vision algorithms. In the following chapters, we will explore specific edge detection algorithms and techniques using OpenCV.
# 3. The Canny Edge Detection Algorithm
Edge detection is a fundamental technique in image processing, and the Canny Edge Detection Algorithm is one of the most widely used methods due to its robustness and accuracy. In this chapter, we will delve into the background of the Canny Edge Detection Algorithm, provide a step-by-step explanation of the process, and discuss parameter tuning for optimal results in OpenCV.
#### 3.1 Background of the Canny Edge Detection Algorithm
The Canny Edge Detection Algorithm, developed by John F. Canny in 1986, aims to identify the edges in an image while minimizing the detection of false edges caused by noise. It is a multi-stage algorithm involving smoothing with a Gaussian filter, finding the intensity gradients, non-maximum suppression, and hysteresis thresholding.
#### 3.2 Step-by-Step Explanation of the Canny Edge Detection Process
1. **Gaussian Smoothing**: The first step is to apply a Gaussian filter to reduce noise and unwanted details in the image.
2. **Intensity Gradient Calculation**: The algorithm then calculates the gradient magnitude and orientation for each pixel using techniques like Sobel or Prewitt operators.
3. **Non-Maximum Suppression**: This step ensures that the algorithm keeps only the local maximum pixel values in the gradient direction, thinning the edges.
4. **Hysteresis Thresholding**: Finally, hysteresis thresholding is applied to determine which edges are true edges, based on high and low threshold values.
#### 3.3 Tuning Parameters for Canny Edge Detection in OpenCV
In OpenCV, the Canny edge detection function allows for parameter tuning to adapt to different imaging conditions. The key parameters include the minimum and maximum threshold values for hysteresis thresholding, and the aperture size for the Sobel operator.
```python
import cv2
image = cv2.imread('input.jpg', 0) # Read the input image in grayscale
edges = cv2.Canny(image, 100, 200) # Apply Canny edge detection with min and max thresholds
cv2.imshow('Canny Edges', edges) # Display the Canny edges
cv2.waitKey(0)
cv2.destroyAllWindows()
```
In the above code snippet, the `cv2.Canny()` function takes the input image, minimum threshold, and maximum threshold as parameters to perform Canny edge detection. By adjusting these threshold values, one can control the sensitivity of edge detection.
Understanding the nuances of parameter selection is crucial for obtaining desirable edge detection results in different scenarios, and fine-tuning may be required based on the specific characteristics of the input images.
The Canny Edge Detection Algorithm offers a balanced approach to edge detection, addressing noise and producing accurate contours. Its versatility and wide adoption make it a valuable tool in various computer vision applications.
In the next chapter, we will explore the Sobel and Prewitt edge detection methods, comparing their effectiveness with the Canny algorithm.
# 4. Sobel and Prewitt Edge Detection
Edge detection is a fundamental technique in image processing and computer vision. It helps in identifying the boundaries of objects within an image, which is essential for various applications such as object recognition, image segmentation, and feature extraction.
#### 4.1 Understanding the Sobel and Prewitt Operators
The Sobel and Prewitt operators are classic edge detection methods that use convolution to calculate the gradient of the image intensity. These operators work by computing the gradient magnitude and direction at each pixel in the image.
The Sobel operator performs convolution with two 3x3 kernels to estimate the gradient in the horizontal and vertical directions. The gradient magnitude can be obtained by combining the horizontal and vertical gradient values.
Similarly, the Prewitt operator also calculates the gradient using convolution with 3x3 kernels but with slightly different weightings.
#### 4.2 Implementation of Sobel and Prewitt Edge Detection in OpenCV
```python
import cv2
import numpy as np
from matplotlib import pyplot as plt
# Read the input image
img = cv2.imread('input_image.jpg', 0)
# Apply Sobel and Prewitt edge detection
sobel_x = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3)
sobel_y = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3)
prewitt_x = cv2.filter2D(img, -1, np.array([[-1, 0, 1], [-1, 0, 1], [-1, 0, 1]]))
prewitt_y = cv2.filter2D(img, -1, np.array([[-1, -1, -1], [0, 0, 0], [1, 1, 1]]))
# Plot the results
plt.subplot(2, 2, 1), plt.imshow(img, cmap='gray')
plt.title('Original Image'), plt.xticks([]), plt.yticks([])
plt.subplot(2, 2, 2), plt.imshow(sobel_x, cmap='gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])
plt.subplot(2, 2, 3), plt.imshow(sobel_y, cmap='gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])
plt.subplot(2, 2, 4), plt.imshow(prewitt_x, cmap='gray')
plt.title('Prewitt X'), plt.xticks([]), plt.yticks([])
plt.show()
```
#### 4.3 Comparing Sobel, Prewitt, and Canny Algorithms
Both Sobel and Prewitt operators are simple and computationally efficient methods for edge detection. However, they are sensitive to noise and may produce thick edges. On the other hand, the Canny edge detection algorithm, which incorporates Gaussian smoothing and non-maximum suppression, provides more accurate and thin edges, making it a preferred choice in many applications.
In the next chapter, we will delve into the Laplacian edge detection technique and explore its application in image processing.
这样整体的第四部分章节的标题符合了Markdown格式,内容也与文章框架相符。
# 5. Laplacian Edge Detection
#### 5.1 Theory Behind the Laplacian Edge Detection
Laplacian edge detection is a method used to detect edges in an image by computing the second derivative of the image intensity function. The Laplacian operator is a 2D isotropic measure of the second spatial derivative of an image, which highlights regions of rapid intensity change. In edge detection, the Laplacian operator is applied to an image to identify the regions where the intensity changes abruptly, thus indicating the presence of an edge.
#### 5.2 Image Sharpening Using Laplacian Operator
One interesting application of the Laplacian operator is image sharpening. By convolving the image with the Laplacian operator, the high-frequency components (edges) in the image are accentuated, leading to a sharpened appearance. The process involves adding the Laplacian of the image to the original image, which enhances the edges and fine details, making the image appear more defined and crisp.
#### 5.3 Applying Laplacian Edge Detection in OpenCV
In OpenCV, we can utilize the Laplacian edge detection algorithm to detect edges in images. Below is an example code snippet in Python using OpenCV to perform Laplacian edge detection:
```python
import cv2
import numpy as np
# Load the image
image = cv2.imread('image.jpg', 0)
# Apply Laplacian operator
laplacian = cv2.Laplacian(image, cv2.CV_64F)
# Convert the output to an 8-bit image
laplacian = np.uint8(np.absolute(laplacian))
# Display the original and Laplacian edge detected images
cv2.imshow('Original Image', image)
cv2.imshow('Laplacian Edge Detection', laplacian)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
In this code snippet, we load an image, apply the Laplacian operator using the `cv2.Laplacian()` function, convert the output to an 8-bit image, and then display both the original and Laplacian edge detected images. This allows us to visualize the edges detected using the Laplacian operator.
By understanding the theory behind Laplacian edge detection and practicing its implementation in OpenCV, we can effectively utilize this technique for edge detection and image sharpening tasks in computer vision applications.
# 6. Performance Comparison and Practical Applications
Edge detection is a critical component in various computer vision applications, and the choice of algorithm can significantly impact the performance and accuracy of the system. In this section, we will compare the performance of different edge detection algorithms and explore their practical applications in real-world scenarios.
### 6.1 Evaluation Metrics for Edge Detection Algorithms
When evaluating the performance of edge detection algorithms, several metrics are commonly used:
1. **Precision and Recall**: These metrics measure the accuracy of the detected edges. Precision is the ratio of correctly detected edges to the total detected edges, while recall is the ratio of correctly detected edges to the total true edges in the image.
2. **F1 Score**: The F1 score is the harmonic mean of precision and recall, providing a balance between the two metrics.
3. **Mean Squared Error (MSE)**: MSE measures the average squared difference between the detected edges and the true edges in the image. A lower MSE indicates better performance.
4. **Execution Time**: The time taken to perform edge detection is crucial in real-time applications. It is essential to compare the computational efficiency of different algorithms.
### 6.2 Real-world Applications of Edge Detection in OpenCV
Edge detection has numerous practical applications across various industries, including:
1. **Object Detection and Recognition**: Edge detection is fundamental for identifying objects and shapes within an image. It forms the basis for object recognition and classification in computer vision systems.
2. **Medical Imaging**: In medical diagnostics, edge detection aids in the detection of anatomical structures and abnormalities in medical images, such as X-rays, MRIs, and CT scans.
3. **Autonomous Vehicles**: Edge detection plays a vital role in enabling autonomous vehicles to perceive and understand their environment by detecting lane markings, obstacles, and other vehicles.
4. **Quality Inspection in Manufacturing**: Edge detection is used for quality control and defect detection in manufacturing processes, such as semiconductor fabrication and product assembly.
5. **Motion Detection and Video Surveillance**: Edge detection is utilized for motion detection and tracking in video surveillance systems, enhancing security and monitoring capabilities.
### 6.3 Conclusion and Future Developments in Edge Detection
In conclusion, the choice of edge detection algorithm depends on the specific requirements of the application, considering factors such as accuracy, computational efficiency, and noise robustness. As technology advances, future developments in edge detection may focus on leveraging deep learning techniques for improved edge detection in complex and dynamic environments. Additionally, the integration of edge detection with other computer vision tasks, such as object recognition and semantic segmentation, will lead to more advanced and comprehensive visual understanding systems.
Overall, edge detection remains a fundamental and evolving aspect of computer vision, playing a pivotal role in various intelligent systems and applications.
以上是文章的第六章节内容,按照Markdown格式进行了展示,如果您需要更多细节或其他章节的内容,请随时告诉我。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏旨在系统地介绍在OpenCV中实现目标检测的各项实践技术。文章将深入讲解图像读取与显示、边缘检测、图像二值化技术、目标检测与识别、Haar特征分类器、级联分类器的应用、深度学习模型在目标检测中的应用、卷积神经网络的介绍与应用,以及SSD目标检测算法的解析等内容。通过本专栏的学习,读者将能够系统地了解OpenCV中目标检测的相关知识和技术,并具备一定的实践能力。不论是对于初学者还是有一定基础的开发者来说,本专栏都能够提供全面而深入的内容,帮助读者快速掌握OpenCV中的目标检测实践技术,从而为实际应用场景中的目标检测任务提供有力支持。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【特征工程稀缺技巧】:标签平滑与标签编码的比较及选择指南
# 1. 特征工程简介
## 1.1 特征工程的基本概念
特征工程是机器学习中一个核心的步骤,它涉及从原始数据中选取、构造或转换出有助于模型学习的特征。优秀的特征工程能够显著提升模型性能,降低过拟合风险,并有助于在有限的数据集上提炼出有意义的信号。
## 1.2 特征工程的重要性
在数据驱动的机器学习项目中,特征工程的重要性仅次于数据收集。数据预处理、特征选择、特征转换等环节都直接影响模型训练的效率和效果。特征工程通过提高特征与目标变量的关联性来提升模型的预测准确性。
## 1.3 特征工程的工作流程
特征工程通常包括以下步骤:
- 数据探索与分析,理解数据的分布和特征间的关系。
- 特
【特征选择工具箱】:R语言中的特征选择库全面解析

# 1. 特征选择在机器学习中的重要性
在机器学习和数据分析的实践中,数据集往往包含大量的特征,而这些特征对于最终模型的性能有着直接的影响。特征选择就是从原始特征中挑选出最有用的特征,以提升模型的预测能力和可解释性,同时减少计算资源的消耗。特征选择不仅能够帮助我
p值在机器学习中的角色:理论与实践的结合

# 1. p值在统计假设检验中的作用
## 1.1 统计假设检验简介
统计假设检验是数据分析中的核心概念之一,旨在通过观察数据来评估关于总体参数的假设是否成立。在假设检验中,p值扮演着决定性的角色。p值是指在原
【时间序列分析】:如何在金融数据中提取关键特征以提升预测准确性

# 1. 时间序列分析基础
在数据分析和金融预测中,时间序列分析是一种关键的工具。时间序列是按时间顺序排列的数据点,可以反映出某
【复杂数据的置信区间工具】:计算与解读的实用技巧
# 1. 置信区间的概念和意义
置信区间是统计学中一个核心概念,它代表着在一定置信水平下,参数可能存在的区间范围。它是估计总体参数的一种方式,通过样本来推断总体,从而允许在统计推断中存在一定的不确定性。理解置信区间的概念和意义,可以帮助我们更好地进行数据解释、预测和决策,从而在科研、市场调研、实验分析等多个领域发挥作用。在本章中,我们将深入探讨置信区间的定义、其在现实世界中的重要性以及如何合理地解释置信区间。我们将逐步揭开这个统计学概念的神秘面纱,为后续章节中具体计算方法和实际应用打下坚实的理论基础。
# 2. 置信区间的计算方法
## 2.1 置信区间的理论基础
### 2.1.1
自然语言处理中的独热编码:应用技巧与优化方法
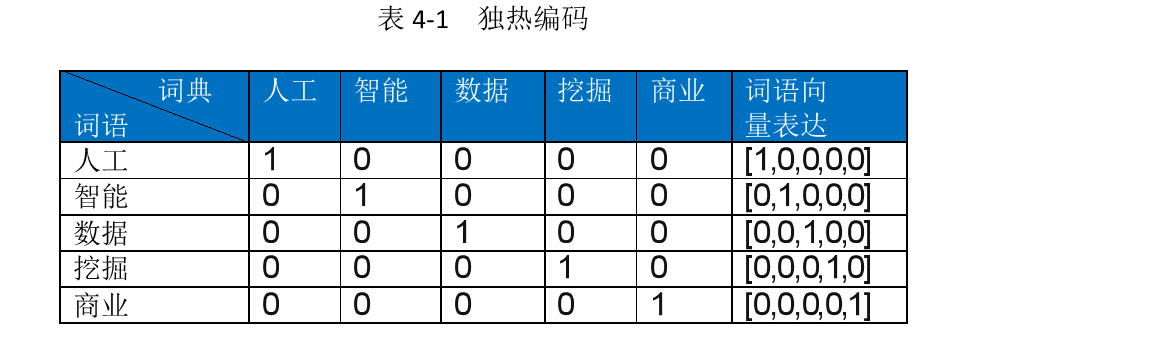
# 1. 自然语言处理与独热编码概述
自然语言处理(NLP)是计算机科学与人工智能领域中的一个关键分支,它让计算机能够理解、解释和操作人类语言。为了将自然语言数据有效转换为机器可处理的形式,独热编码(One-Hot Encoding)成为一种广泛应用的技术。
## 1.1 NLP中的数据表示
在NLP中,数据通常是以文本形式出现的。为了将这些文本数据转换为适合机器学习模型的格式,我们需要将单词、短语或句子等元
训练集大小对性能的影响:模型评估的10大策略

# 1. 模型评估的基础知识
在机器学习与数据科学领域中,模型评估是验证和比较机器学习算法表现的核心环节。本章节将从基础层面介绍模型评估的基本概念和重要性。我们将探讨为什么需要评估模型、评估模型的目的以及如何选择合适的评估指标。
## 1.1 评估的重要性
模型评估是为了确定模型对未知数据的预测准确性与可靠性。一个训练好的模型,只有在独立的数据集上表现良好,才能够
大样本理论在假设检验中的应用:中心极限定理的力量与实践
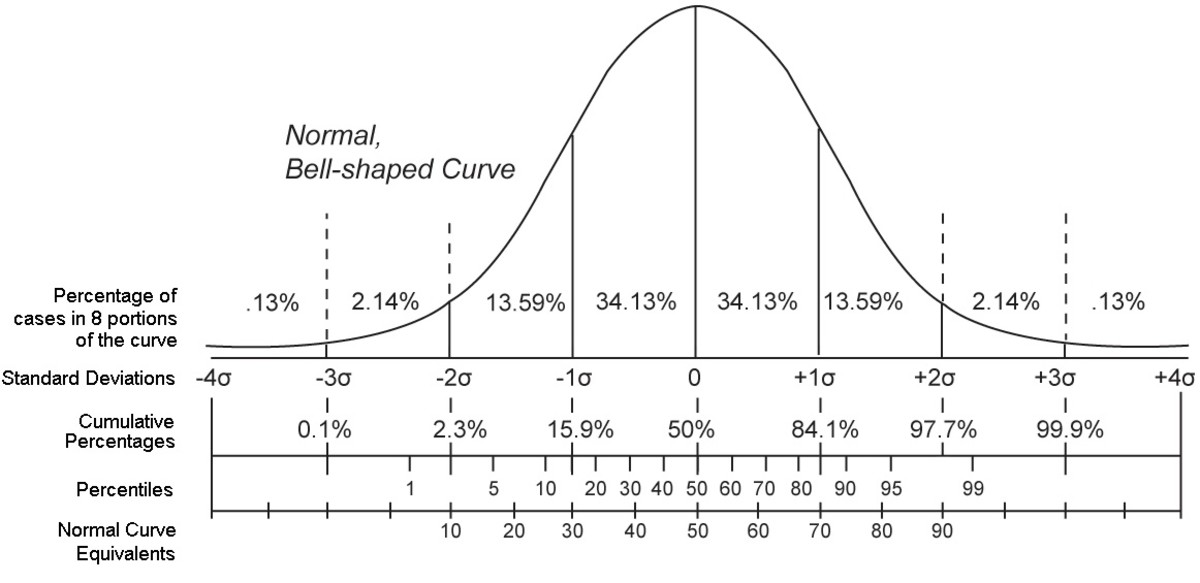
# 1. 中心极限定理的理论基础
## 1.1 概率论的开篇
概率论是数学的一个分支,它研究随机事件及其发生的可能性。中心极限定理是概率论中最重要的定理之一,它描述了在一定条件下,大量独立随机变量之和(或平均值)的分布趋向于正态分布的性
【交互特征的影响】:分类问题中的深入探讨,如何正确应用交互特征
# 1. 交互特征在分类问题中的重要性
在当今的机器学习领域,分类问题一直占据着核心地位。理解并有效利用数据中的交互特征对于提高分类模型的性能至关重要。本章将介绍交互特征在分类问题中的基础重要性,以及为什么它们在现代数据科学中变得越来越不可或缺。
## 1.1 交互特征在模型性能中的作用
交互特征能够捕捉到数据中的非线性关系,这对于模型理解和预测复杂模式至关重要。例如
【PCA算法优化】:减少计算复杂度,提升处理速度的关键技术

# 1. PCA算法简介及原理
## 1.1 PCA算法定义
主成分分析(PCA)是一种数学技术,它使用正交变换来将一组可能相关的变量转换成一组线性不相关的变量,这些新变量被称为主成分。
## 1.2 应用场景概述
PCA广泛应用于图像处理、降维、模式识别和数据压缩等领域。它通过减少数据的维度,帮助去除冗余信息,同时尽可能保
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )