图像灰度化处理方法及实践
发布时间: 2024-05-01 16:27:10 阅读量: 33 订阅数: 23 
# 1. 图像灰度化处理概述**
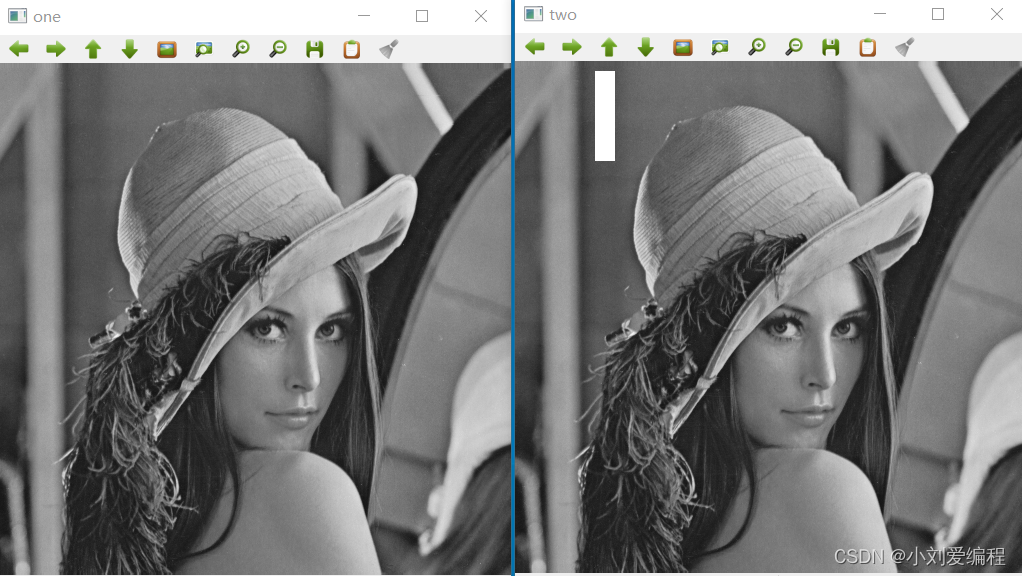
图像灰度化处理是一种将彩色图像转换为灰度图像的技术,灰度图像仅包含灰度值,范围从 0(黑色)到 255(白色)。灰度化处理在图像处理和计算机视觉领域中广泛应用,因为它可以简化图像分析和处理。
# 2. 灰度化处理理论基础
### 2.1 灰度化处理的概念和原理
#### 2.1.1 灰度化处理的定义
灰度化处理是一种图像处理技术,它将彩色图像或多通道图像转换为灰度图像,即仅包含亮度信息的单通道图像。灰度图像的每个像素值表示图像中该像素的亮度或明暗程度。灰度值通常使用 0 到 255 的范围,其中 0 表示黑色,255 表示白色,介于两者之间的值表示不同的灰度等级。
#### 2.1.2 灰度化处理的算法基础
灰度化处理算法的基本原理是将彩色图像或多通道图像中的每个像素的各个通道值转换为一个灰度值。常见的灰度化算法包括:
* **最大值法:**取图像中每个像素各个通道中的最大值作为灰度值。
* **平均值法:**取图像中每个像素各个通道值的平均值作为灰度值。
* **加权平均值法:**使用不同的权重对图像中每个像素各个通道的值进行加权平均,得到灰度值。
### 2.2 灰度化处理的数学模型
#### 2.2.1 灰度级分布模型
灰度级分布模型描述了灰度图像中不同灰度级出现的频率。它通常以直方图的形式表示,其中横轴表示灰度级,纵轴表示该灰度级出现的次数。灰度级分布模型可以反映图像的整体亮度和对比度信息。
#### 2.2.2 灰度直方图模型
灰度直方图是灰度级分布模型的一种可视化表示。它显示了图像中每个灰度级的像素数量。灰度直方图可以帮助分析图像的亮度分布、对比度和纹理信息。
**代码块:**
```python
import cv2
import matplotlib.pyplot as plt
# 读取彩色图像
image = cv2.imread('image.jpg')
# 转换为灰度图像
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 计算灰度直方图
hist = cv2.calcHist([gray_image], [0], None, [256], [0, 256])
# 绘制灰度直方图
plt.plot(hist)
plt.show()
```
**逻辑分析:**
这段代码使用 OpenCV 库将彩色图像转换为灰度图像,然后计算灰度图像的直方图。直方图显示了图像中每个灰度级的像素数量。
**参数说明:**
* `cv2.imread()`:读取彩色图像。
* `cv2.cvtColor()`:将彩色图像转换为灰度图像。
* `cv2.calcHist()`:计算灰度图像的直方图。
* `plt.plot()`:绘制灰度直方图。
# 3. 灰度化处理实践方法
### 3.1 灰度化处理的常用算法
灰度化处理的常用算法主要包括最大值法、平均值法和加权平均值法。
#### 3.1.1 最大值法
最大值法是一种简单的灰度化处理算法,它将图像中每个像素的灰度值设置为该像素所在邻域内最大灰度值。
**代码块:**
```python
import cv2
import numpy as np
def max_filter(image):
# 获取图像的形状
height, width = image.shape
# 创建一个新的灰度图像
gray_image = np.zeros((height, width), dtype=np.uint8)
# 遍历图像中的每个像素
for i in range(height):
for j in range(width):
# 获取像素的邻域
neighborhood = image[i-1:i+2, j-1:j+2]
# 获取邻域中的最大灰度值
max_value = np.max(neighborhood)
# 将像素的灰度值设置为最大灰度值
gray_image[i, j] = max_value
return gray_image
```
**逻辑分析:**
* `max_filter()` 函数接收一个图像作为输入,并返回一个灰度图像。
* 首先,获取图像的形状(高度和宽度)。
* 然后,创建一个新的灰度图像,其形状与输入图像相同。
* 接下来,遍历图像中的每个像素。
* 对于每个像素,获取其 3x3 邻域(即像素及其周围的 8 个像素)。
* 在邻域中找到最大灰度值。
* 最后,将像素的灰度值设置为最大灰度值。
#### 3.1.2 平均值法
平均值法是一种灰度化处理算法,它将图像中每个像素的灰度值设置为该像素所在邻域内所有灰度值的平均值。
**代码块:**
```python
import cv2
import numpy as np
def mean_filter(image):
# 获取图像的形状
height, width = image.shape
# 创建一个新的灰度图像
gray_image = np.zeros((height, width), dtype=np.uint8)
# 遍历图像中的每个像素
for i in range(height):
for j in range(width):
# 获取像素的邻域
neighborhood = image[i-1:i+2, j-1:j+2]
# 获取邻域中的平均灰度值
mean_value = np.mean(neighborhood)
# 将像素的灰度值设置为平均灰度值
gray_image[i, j] = mean_value
return gray_image
```
**逻辑分析:**
* `mean_filter()` 函数接收一个图像作为输入,并返回一个灰度图像。
* 首先,获取图像的形状(高度和宽度)。
* 然后,创建一个新的灰度图像,其形状与输入图像相同。
* 接下来,遍历图像中的每个像素。
* 对于每个像素,获取其 3x3 邻域(即像素及其周围的 8 个像素)。
* 在邻域中计算平均灰度值。
* 最后,将像素的灰度值设置为平均灰度值。
#### 3.1.3 加权平均值法
加权平均值法是一种灰度化处理算法,它将图像中每个像素的灰度值设置为该像素所在邻域内所有灰度值的加权平均值。
**代码块:**
```python
import cv2
import numpy as np
def weighted_mean_filter(image):
# 获取图像的形状
height, width = image.shape
# 创建一个新的灰度图像
gray_image = np.zeros((height, width), dtype=np.uint8)
# 遍历图像中的每个像素
for i in range(height):
for j in range(width):
# 获取像素的邻域
neighborhood = image[i-1:i+2, j-1:j+2]
# 创建一个权重矩阵
weights = np.array([[1, 2, 1], [2, 4, 2], [1, 2, 1]])
# 计算邻域中加权平均灰度值
weighted_mean_value = np.sum(neighborhood * weights) / np.sum(weights)
# 将像素的灰度值设置为加权平均灰度值
gray_image[i, j] = weighted_mean_value
return gray_image
```
**逻辑分析:**
* `weighted_mean_filter()` 函数接收一个图像作为输入,并返回一个灰度图像。
* 首先,获取图像的形状(高度和宽度)。
* 然后,创建一个新的灰度图像,其形状与输入图像相同。
* 接下来,遍历图像中的每个像素。
* 对于每个像素,获取其 3x3 邻域(即像素及其周围的 8 个像素)。
* 创建一个权重矩阵,该矩阵指定了邻域中每个像素的权重。
* 在邻域中计算加权平均灰度值。
* 最后,将像素的灰度值设置为加权平均灰度值。
### 3.2 灰度化处理的图像增强技术
灰度化处理的图像增强技术主要包括直方图均衡化和局部对比度增强。
#### 3.2.1 直方图均衡化
直方图均衡化是一种图像增强技术,它通过调整图像的直方图来提高图像的对比度和亮度。
**代码块:**
```python
import cv2
def histogram_equalization(image):
# 计算图像的直方图
hist = cv2.calcHist([image], [0], None, [256], [0, 256])
# 计算累积直方图
cdf = hist.cumsum()
# 归一化累积直方图
cdf_normalized = cdf / cdf[-1]
# 创建一个新的图像
equalized_image = np.zeros(image.shape, dtype=np.uint8)
# 遍历图像中的每个像素
for i in range(image.shape[0]):
for j in range(image.shape[1]):
# 获取像素的灰度值
gray_value = image[i, j]
# 将像素的灰度值映射到新的图像中
equalized_image[i, j] = cdf_normalized[gray_value] * 255
return equalized_image
```
**逻辑分析:**
* `histogram_equalization()` 函数接收一个图像作为输入,并返回一个直方图均衡化的图像。
* 首先,计算图像的直方图。
* 然后,计算累积直方图。
* 接下来,归一化累积直方图。
* 创建一个新的图像。
* 遍历图像中的每个像素。
* 对于每个像素,获取其灰度值。
* 将像素的灰度值映射到新的图像中,映射关系由归一化累积直方图决定。
#### 3.2.2 局部对比度增强
局部对比度增强是一种图像增强技术,它通过调整图像中局部区域的对比度来提高图像的清晰度。
**代码块:**
```python
import cv2
def local_contrast_enhancement(image):
# 创建一个拉普拉斯算子
laplacian = np.array([[0, -1, 0], [-1, 4, -1], [0, -1, 0]])
# 对图像进行卷积
filtered_image = cv2.filter2D(image, -1, laplacian)
# 将卷积后的图像添加到原始图像中
enhanced_image = image + filtered_image
return enhanced_image
```
**逻辑分析:**
* `local_contrast_enhancement()` 函数接收一个图像作为输入,并返回一个局部对比度增强的图像。
* 首先,创建一个拉普拉斯算子。
* 然后,对图像进行卷积。
* 接下来,将卷积后的图像添加到原始图像中。
* 最后,返回增强的图像。
# 4. 灰度化处理应用实践
灰度化处理在图像处理领域有着广泛的应用,它不仅可以作为图像处理的基础步骤,还可以在图像分割、图像识别等高级图像处理任务中发挥重要作用。
### 4.1 灰度化处理在图像分割中的应用
图像分割是将图像划分为具有不同特征的区域或对象的过程。灰度化处理可以通过提供图像中像素的灰度信息,为图像分割提供基础数据。
**4.1.1 基于阈值的图像分割**
基于阈值的图像分割是一种简单有效的图像分割方法。它通过设置一个阈值,将图像中的像素分为前景和背景。灰度值大于阈值的像素被归为前景,而小于阈值的像素被归为背景。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 灰度化处理
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 设置阈值
threshold = 128
# 基于阈值分割图像
segmented_image = cv2.threshold(gray_image, threshold, 255, cv2.THRESH_BINARY)[1]
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**参数说明:**
* `cv2.imread()`:读取图像文件。
* `cv2.cvtColor()`:将图像转换为灰度图像。
* `cv2.threshold()`:基于阈值分割图像。
* `threshold`:阈值,用于区分前景和背景。
* `cv2.THRESH_BINARY`:阈值分割类型,将像素分为前景和背景。
**逻辑分析:**
1. 读取图像并转换为灰度图像。
2. 设置阈值。
3. 基于阈值分割图像,将像素分为前景和背景。
4. 显示分割后的图像。
**4.1.2 基于区域的图像分割**
基于区域的图像分割是一种基于像素之间的相似性将图像分割为不同区域的方法。灰度值是像素相似性的一个重要指标,因此灰度化处理可以为基于区域的图像分割提供基础数据。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 灰度化处理
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 基于区域分割图像
segmented_image = cv2.watershed(gray_image)
# 显示分割后的图像
cv2.imshow('Segmented Image', segmented_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
```
**参数说明:**
* `cv2.watershed()`:基于区域分割图像。
**逻辑分析:**
1. 读取图像并转换为灰度图像。
2. 基于区域分割图像,将像素分为不同的区域。
3. 显示分割后的图像。
### 4.2 灰度化处理在图像识别中的应用
图像识别是识别图像中对象的计算机视觉任务。灰度化处理可以通过提供图像中像素的灰度信息,为图像识别提供基础数据。
**4.2.1 特征提取**
特征提取是从图像中提取用于识别对象的特征的过程。灰度值是图像中像素的一个重要特征,因此灰度化处理可以为特征提取提供基础数据。
```python
import cv2
# 加载图像
image = cv2.imread('image.jpg')
# 灰度化处理
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 特征提取
features = cv2.HOGDescriptor().compute(gray_image)
# 打印特征
print(features)
```
**参数说明:**
* `cv2.HOGDescriptor()`:用于提取图像中梯度方向直方图(HOG)特征的描述符。
* `compute()`:计算图像的HOG特征。
**逻辑分析:**
1. 读取图像并转换为灰度图像。
2. 使用HOG描述符提取图像的HOG特征。
3. 打印提取的特征。
**4.2.2 模式识别**
模式识别是将图像中的对象分类到特定类别中的过程。灰度化处理可以通过提供图像中像素的灰度信息,为模式识别提供基础数据。
```python
import cv2
import numpy as np
# 加载图像
image = cv2.imread('image.jpg')
# 灰度化处理
gray_image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 特征提取
features = cv2.HOGDescriptor().compute(gray_image)
# 训练分类器
classifier = cv2.ml.SVM_create()
classifier.train(np.array([features]), cv2.ml.ROW_SAMPLE, np.array([0]))
# 预测图像类别
prediction = classifier.predict(np.array([features]))
# 打印预测结果
print(prediction)
```
**参数说明:**
* `cv2.ml.SVM_create()`:创建支持向量机(SVM)分类器。
* `train()`:训练分类器。
* `predict()`:预测图像的类别。
**逻辑分析:**
1. 读取图像并转换为灰度图像。
2. 使用HOG描述符提取图像的HOG特征。
3. 训练SVM分类器。
4. 使用训练好的分类器预测图像的类别。
5. 打印预测结果。
# 5.1 灰度化处理算法的性能优化
### 5.1.1 并行化处理
图像灰度化处理是一个计算密集型任务,特别是对于大尺寸图像。并行化处理技术可以有效提高灰度化处理的效率。常用的并行化方法包括:
- **多线程处理:**将图像划分为多个子区域,并使用多个线程同时处理这些子区域。
- **GPU 处理:**利用 GPU 的并行计算能力,显著提高灰度化处理速度。
### 5.1.2 算法改进
除了并行化处理外,还可以通过改进灰度化处理算法本身来提高性能。一些常见的优化方法包括:
- **快速灰度化算法:**使用快速近似算法,如 Floyd-Steinberg 算法,可以在保持图像质量的同时提高处理速度。
- **自适应灰度化算法:**根据图像的局部特征动态调整灰度化参数,从而提高图像质量和处理效率。
## 5.2 灰度化处理的未来发展趋势
### 5.2.1 深度学习在灰度化处理中的应用
深度学习技术在图像处理领域取得了显著进展。深度学习模型可以自动学习图像的特征,并根据这些特征进行灰度化处理。这种方法可以提高灰度化处理的准确性和鲁棒性。
### 5.2.2 云计算在灰度化处理中的应用
云计算平台提供了强大的计算资源和存储空间。通过将灰度化处理任务部署到云端,可以实现大规模图像处理,满足高性能计算需求。
0
0
相关推荐
专栏简介
《OpenCV图像处理从基础到高级应用》专栏深入探讨了图像处理的各个方面,涵盖从基础概念到高级技术的广泛内容。它提供了详细的示例和代码片段,帮助读者理解和应用OpenCV库中的图像处理技术。从图像读取和显示到图像分割和深度学习,该专栏提供了全面的指南,使读者能够掌握图像处理的各个方面。通过深入的理论解释、实践应用和实际示例,该专栏为初学者和经验丰富的开发者提供了宝贵的资源,帮助他们充分利用OpenCV的强大功能。
专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
最新推荐
MATLAB求平均值在社会科学研究中的作用:理解平均值在社会科学数据分析中的意义
# 1. 平均值在社会科学中的作用
平均值是社会科学研究中广泛使用的一种统计指标,它可以提供数据集的中心趋势信息。在社会科学中,平均值通常用于描述人口特
MATLAB符号数组:解析符号表达式,探索数学计算新维度
# 1. MATLAB 符号数组简介**
MATLAB 符号数组是一种强大的工具,用于处理符号表达式和执行符号计算。符号数组中的元素可以是符
深入了解MATLAB开根号的最新研究和应用:获取开根号领域的最新动态

# 1. MATLAB开根号的理论基础
开根号运算在数学和科学计算中无处不在。在MATLAB中,开根号可以通过多种函数实现,包括`sqrt()`和`nthroot()`。`sqrt()`函数用于计算正实数的平方根,而`nt
MATLAB柱状图在信号处理中的应用:可视化信号特征和频谱分析

# 1. MATLAB柱状图概述**
MATLAB柱状图是一种图形化工具,用于可视化数据中不同类别或组的分布情况。它通过绘制垂直条形来表示每个类别或组中的数据值。柱状图在信号处理中广泛用于可视化信号特征和进行频谱分析。
柱状图的优点在于其简单易懂,能够直观地展示数据分布。在信号处理中,柱状图可以帮助工程师识别信号中的模式、趋势和异常情况,从而为信号分析和处理提供有价值的见解。
# 2. 柱状图在信号处理中的应用
柱状图在信号处理
MATLAB字符串拼接与财务建模:在财务建模中使用字符串拼接,提升分析效率

# 1. MATLAB 字符串拼接基础**
字符串拼接是 MATLAB 中一项基本操作,用于将多个字符串连接成一个字符串。它在财务建模中有着广泛的应用,例如财务数据的拼接、财务公式的表示以及财务建模的自动化。
MATLAB 中有几种字符串拼接方法,包括 `+` 运算符、`strcat` 函数和 `sprintf` 函数。`+` 运算符是最简单的拼接
图像处理中的求和妙用:探索MATLAB求和在图像处理中的应用
# 1. 图像处理简介**
图像处理是利用计算机对图像进行各种操作,以改善图像质量或提取有用信息的技术。图像处理在各个领域都有广泛的应用,例如医学成像、遥感、工业检测和计算机视觉。
图像由像素组成,每个像素都有一个值,表示该像素的颜色或亮度。图像处理操作通常涉及对这些像素值进行数学运算,以达到增强、分
MATLAB在图像处理中的应用:图像增强、目标检测和人脸识别
# 1. MATLAB图像处理概述
MATLAB是一个强大的技术计算平台,广泛应用于图像处理领域。它提供了一系列内置函数和工具箱,使工程师
MATLAB散点图:使用散点图进行信号处理的5个步骤
# 1. MATLAB散点图简介
散点图是一种用于可视化两个变量之间关系的图表。它由一系列数据点组成,每个数据点代表一个数据对(x,y)。散点图可以揭示数据中的模式和趋势,并帮助研究人员和分析师理解变量之间的关系。
在MATLAB中,可以使用`scatter`函数绘制散点图。`scatter`函数接受两个向量作为输入:x向量和y向量。这些向量必须具有相同长度,并且每个元素对(x,y)表示一个数据点。例如,以下代码绘制
NoSQL数据库实战:MongoDB、Redis、Cassandra深入剖析
# 1. NoSQL数据库概述
**1.1 NoSQL数据库的定义**
NoSQL(Not Only SQL)数据库是一种非关系型数据库,它不遵循传统的SQL(结构化查询语言)范式。NoSQL数据库旨在处理大规模、非结构化或半结构化数据,并提供高可用性、可扩展性和灵活性。
**1.2 NoSQL数据库的类型**
NoSQL数据库根据其数据模型和存储方式分为以下
MATLAB平方根硬件加速探索:提升计算性能,拓展算法应用领域

# 1. MATLAB 平方根计算基础**
MATLAB 提供了 `sqrt()` 函数用于计算平方根。该函数接受一个实数或复数作为输入,并返回其平方根。`sqrt()` 函数在 MATLAB 中广泛用于各种科学和工程应用中,例如信号处理、图像处理和数值计算。
**代码块:**
```matlab
% 计算实数的平方根
x = 4;
sqrt_x = sqrt(x);
%
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
VIP年卡限时特惠
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )