系统鲁棒性分析与控制器设计
发布时间: 2024-01-16 00:50:50 阅读量: 34 订阅数: 30 
# 1. 引言
## 1.1 研究背景和意义
控制系统在工程和科学领域中起着至关重要的作用。然而,真实世界中的控制系统通常面临着各种各样的干扰和不确定性因素,这些因素会对系统的稳定性和性能产生负面影响。因此,研究系统的鲁棒性分析与控制器设计变得非常重要。
鲁棒性分析是评估控制系统在面对外部扰动和系统参数变化时的稳定性和性能表现能力。通过鲁棒性分析,可以确定系统可能面对的不确定性来源以及其对系统行为的影响。鲁棒性评估指标衡量了系统在不确定性的情况下能否保持稳定并达到预期性能要求。
## 1.2 文章结构介绍
本文主要围绕系统鲁棒性分析与控制器设计展开讨论。首先,在第二章中,将介绍系统鲁棒性的概念和基本原理,并介绍常用的鲁棒性分析方法和评估指标。在第三章中,将介绍控制器设计的基本原理,包括 PID 控制器、鲁棒控制器和自适应控制器的设计方法。接下来,在第四章中,将详细介绍系统建模方法,并通过案例分析展示如何进行鲁棒性分析和模型不确定性分析。在第五章中,将着重讨论鲁棒性控制器的设计方法,并介绍扰动补偿控制器和鲁棒自适应控制器的设计原理。最后,在第六章中,将通过案例研究对前面的理论进行验证,并给出结论和展望。
通过本文的阅读,读者将能够深入了解系统鲁棒性分析与控制器设计的基本原理和方法,并能够在实际工程中应用这些知识来提高控制系统的鲁棒性和性能。
# 2. 系统鲁棒性分析
### 2.1 系统鲁棒性概述
系统鲁棒性是指系统对于参数变化、外部扰动或者模型不确定性等干扰的抵抗能力。在控制系统中,鲁棒性分析是设计稳定可靠的控制器的关键步骤。
### 2.2 鲁棒性分析方法
在进行鲁棒性分析时,常用的方法包括频域分析、时域分析和基于鲁棒性控制的方法。频域分析方法将系统和干扰在频率域上进行分析,通过稳定边界等指标来评估系统的鲁棒性。时域分析方法则侧重于系统的时域响应特性,包括步响应、阶跃响应等。鲁棒性控制方法是一种综合了频域和时域分析的方法,通过构建鲁棒控制器来改善系统的鲁棒性能。
### 2.3 鲁棒性评估指标
在分析系统的鲁棒性时,常用的评估指标包括最大稳定增益边界(GM)、相位裕度(PM)、灵敏度函数等。最大稳定增益边界是指系统的稳定边界值,能够反映系统对于干扰的抵抗能力。相位裕度表示系统相位角与稳定相位角之间的差距,越大表示系统对于相位干扰的抵抗能力更强。灵敏度函数则用来评估系统在干扰输入下的输出响应。
通过对系统的鲁棒性进行分析和评估,可以为控制器的设计提供指导,提高系统的稳定性和鲁棒性能。
# 3. 控制器设计原理
#### 3.1 控制器设计概述
控制器是控制系统中的关键组成部分,其设计目的是使系统的输出能够在给定的条件下实现期望的性能。控制器设计需要考虑系统的动态特性、稳定性和鲁棒性等因素,以满足系统的控制要求。
#### 3.2 PID 控制器
PID(Proportional-Integral-Derivative)控制器是一种经典的控制器设计方法,它根据系统的偏差、积分和微分

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以计算机控制系统技术为主题,内容涵盖控制系统建模与控制算法设计的各个方面。首先介绍了控制系统的基本概念和简介,并深入探讨了传感器和执行器在控制系统中的作用。接着对控制系统的连续时间与离散时间表示进行了讨论,比较分析了开环与闭环控制的特点。在此基础上,详细介绍了状态空间模型与状态反馈控制的原理和设计方法。同时也涉及了传感器的校正与标定,以及系统鲁棒性分析与控制器设计等内容。此外,还包括了数字信号处理、模型预测控制、数字滤波器、模糊控制理论、人工神经网络、遗传算法优化等技术在控制系统中的应用。最后,还涉及多变量控制系统、分布式控制系统、无线传感器网络以及机器学习等最新领域的应用。整个专栏内容丰富全面,适合对控制系统技术感兴趣并希望深入了解的读者阅读学习。
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【多媒体集成】:在七夕表白网页中优雅地集成音频与视频

# 1. 多媒体集成的重要性及应用场景
多媒体集成,作为现代网站设计不可或缺的一环,至关重要。它不仅仅是网站内容的丰富和视觉效果的提升,更是一种全新的用户体验和交互方式的创造。在数字时代,多媒体元素如音频和视频的融合已经深入到我们日常生活的每一个角落,从个人博客到大型电商网站,从企业品牌宣传到在线教育平台,多媒体集成都在发挥着不可替代的作用。
具体而言,多媒体集成在提
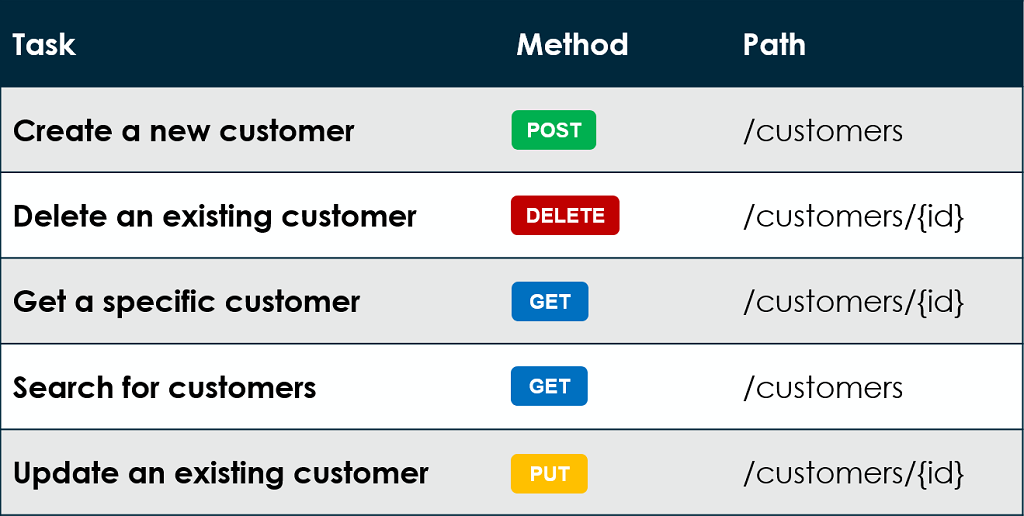
Java美食网站API设计与文档编写:打造RESTful服务的艺术

# 1. RESTful服务简介与设计原则
## 1.1 RESTful 服务概述
RESTful 服务是一种架构风格,它利用了 HTTP 协议的特性来设计网络服务。它将网络上的所有内容视为资源(Resource),并采用统一接口(Uniform Interface)对这些资源进行操作。RESTful API 设计的目的是为了简化服务器端的开发,提供可读性
【数据洞察力】:图表解读与分析
# 1. 数据可视化的基本原理
## 1.1 数据可视化的意义
数据可视化是一个将数据转化为直观图形的过程,目的在于借助视觉元素帮助人们更快捷地理解和分析数据。通过恰当的图形展示,复杂的数据集合可以转化为易于观众理解的视觉形式,从而使非专业人员也能把握数据背后的故事。
## 1.2 数据可视化的原理
数据可视化的原理基于人类视觉系统的强大处理能力。通过图形、颜色、形状等视觉线索,用户可以迅速地识别模式、趋
【AUTOCAD参数化设计】:文字与表格的自定义参数,建筑制图的未来趋势!

# 1. AUTOCAD参数化设计概述
在现代建筑设计领域,参数化设计正逐渐成为一种重要的设计方法。Autodesk的AutoCAD软件,作为业界广泛使用的绘图工具,其参数化设计功能为设计师提供了强大的技术支持。参数化设计不仅提高了设计效率,而且使设计模型更加灵活、易于修改,适应快速变化的设计需求。
## 1.1 参数化设计的
点阵式显示屏在嵌入式系统中的集成技巧

# 1. 点阵式显示屏技术简介
点阵式显示屏,作为电子显示技术中的一种,以其独特的显示方式和多样化的应用场景,在众多显示技术中占有一席之地。点阵显示屏是由多个小的发光点(像素)按
Java SFTP文件上传:突破超大文件处理与跨平台兼容性挑战

# 1. Java SFTP文件上传基础
## 1.1 Java SFTP文件上传概述
在Java开发中,文件的远程传输是一个常见的需求。SFTP(Secure File Transfer Protocol)作为一种提供安全文件传输的协议,它在安全性方面优于传统的FT
【光伏预测模型优化】:金豺算法与传统方法的实战对决

# 1. 光伏预测模型的理论基础
## 1.1 光伏预测模型的重要性
在可再生能源领域,准确预测光伏系统的能量输出对电网管理和电力分配至关重要。由于太阳能发电受到天气条件、季节变化等多种因素的影响,预测模型的开发显得尤为重要。光伏预测模型能够为电网运营商和太阳能投资者提供关键数据,帮助他们做出更加科学的决策。
## 1.2 光伏预测模型的主要类型
光伏预测模型通常可以分为物理模型、统计学模型和机器学习模
JavaWeb小系统API设计:RESTful服务的最佳实践
# 1. RESTful API设计原理与标准
在本章中,我们将深入探讨RESTful API设计的核心原理与标准。REST(Representational State Transfer,表现层状态转化)架构风格是由Roy Fielding在其博士论文中提出的,并迅速成为Web服务架构的重要组成部分。RESTful API作为构建Web服务的一种风格,强调无状态交互、客户端与
【VB性能优化秘籍】:提升代码执行效率的关键技术

# 1. Visual Basic性能优化概述
Visual Basic,作为一种广泛使用的编程语言,为开发者提供了强大的工具来构建各种应用程序。然而,在开发高性能应用时,仅仅掌握语言的基础知识是不够的。性能优化,是指在不影响软件功能和用户体验的前提下,通过一系列的策略和技术手段来提高软件的运行效率和响应速度。在本章中,我们将探讨Visual Basic性能优化的基本概
【用户体验优化】:OCR识别流程优化,提升用户满意度的终极策略

# 1. OCR技术与用户体验概述
在当今数字化时代,OCR(Optical Character Recognition,光学字符识别)技术已成为将图像中的文字转换为机器编码文本的关键技术。本章将概述OCR技术的发展历程、核心功能以及用户体验的相关概念,并探讨二者之间如何相互促进,共同提升信息处理的效率
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )