JNI和NDK基础:线程与同步
发布时间: 2024-02-27 14:55:07 阅读量: 37 订阅数: 26 

线程的同步与实现
# 1. 理解JNI和NDK
## 1.1 JNI的概念与作用
JNI全称为Java Native Interface,是Java提供的一种机制,允许Java代码和其他语言(如C、C++)进行交互。JNI的主要作用是在Java程序中调用本地代码实现对底层系统的访问和操作,扩展了Java的应用范围。
在Android开发中,JNI常用于与C/C++代码交互,优化程序性能,或者调用底层系统功能。
## 1.2 NDK的概念与作用
NDK是Android Native Development Kit的缩写,是一个工具集,允许开发者使用C和C++来编写Android的部分代码。NDK的主要作用是提高性能、重用现有的C/C++库、以及提供更多的开发灵活性。
总的来说,JNI和NDK的出现都是为了解决在Java/Android开发中需要使用底层语言或者优化性能的需求。在接下来的章节中,我们将深入探讨JNI和NDK中的线程与同步相关内容。
# 2. JNI中的多线程编程
在JNI中,多线程编程是非常常见的,特别是在需要调用一些本地或第三方库函数、处理复杂计算或IO密集型任务等场景下。本章将讨论JNI中的多线程编程,并重点关注线程的创建与管理,以及线程间通信与同步的技术。
### 2.1 线程的创建与管理
在JNI中,可以使用`pthread`库来创建和管理线程。下面是一个简单的示例,演示了如何在JNI中创建一个新线程:
```java
public class MyJNI {
static {
System.loadLibrary("myjni");
}
// Native方法,用于创建一个新线程
public native void createNewThread();
}
```
在C/C++代码中实现该native方法:
```c
#include <jni.h>
#include <pthread.h>
// Native方法的实现
JNIEXPORT void JNICALL Java_com_example_MyJNI_createNewThread(JNIEnv *env, jobject obj) {
pthread_t thread;
pthread_create(&thread, NULL, myThreadFunction, (void *)env);
}
// 新线程的入口函数
void* myThreadFunction(void* argument) {
JNIEnv *env;
// 将当前线程附加到JVM
(*g_vm)->AttachCurrentThread(g_vm, &env, NULL);
// 在新线程中执行一些任务...
// 将当前线程从JVM分离
(*g_vm)->DetachCurrentThread(g_vm);
return NULL;
}
```
上述示例中,首先在Java代码中声明了一个native方法`createNewThread`,然后在C/C++代码中实现了该方法,并使用`pthread`库创建了一个新线程。需要注意的是,在新线程中操作JNI对象时,必须先附加当前线程到JVM,执行完操作后再分离当前线程,避免出现潜在的问题。
### 2.2 线程间通信与同步
在多线程编程中,线程间的通信和同步是至关重要的。在JNI中,可以利用Java中的`wait`、`notify`、`notifyAll`等方法来实现线程间的通信和同步。下面是一个简单的示例,演示了如何在JNI中实现线程间的同步:
```java
public class MyJNI {
static {
System.loadLibrary("myjni");
}
// 用于线程间通信与同步的共享变量
private static Object lock = new Object();
private boolean ready = false;
// Native方法,用于在新线程中改变ready变量状态
public native void notifyReady();
// Native方法,用于在新线程中等待ready变为true
public native void waitForReady();
}
```
在C/C++代码中实现这两个native方法:
```c
#include <jni.h>
// 用于线程间通信与同步的共享变量
static jobject g_lock;
static jboolean g_ready;
// Native方法的实现,用于在新线程中改变ready变量状态
JNIEXPORT void JNICALL Java_com_example_MyJNI_notifyReady(JNIEnv *env, jobject obj) {
// 获取共享变量的锁
pthread_mutex_lock(&g_lock);
g_ready = true;
// 通知等待的线程
pthread_cond_signal(&g_condition);
// 释放锁
pthread_mutex_unlock(&g_lock);
}
// Native方法的实现,用于在新线程中等待ready变为true
JNIEXPORT void JNICALL Java_
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《JNI和NDK基础》专栏深入探讨了Java Native Interface(JNI)和Native Development Kit(NDK)的基础知识和应用技巧。从课程介绍到系统服务,逐步展开了一系列主题,包括JNI数据类型与指针嵌套、JNI属性访问、JNI异常处理、JNI缓存技术、常用工具与库、动态链接库加载与使用、线程与同步、文件操作、网络编程、音频处理、视频处理、数据库操作等。通过学习本专栏,读者将深入了解JNI与NDK之间的关系、JNI的数据类型操作、JNI异常处理的方法,以及在Android开发中的实际应用,为构建高效、稳定的Native程序提供了全面的指导与实践经验。
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘雷达信号处理:从脉冲到频谱的魔法转换
# 摘要
本文对雷达信号处理技术进行了全面概述,从基础理论到实际应用,再到高级实践及未来展望进行了深入探讨。首先介绍了雷达信号的基本概念、脉冲编码以及时间域分析,然后深入研究了频谱分析在雷达信号处理中的基础理论、实际应用和高级技术。在高级实践方面,本文探讨了雷达信号的采集、预处理、数字化处理以及模拟与仿真的相关技术。最后,文章展望了人工智能、新兴技术对雷达信号处理带来的影响,以及雷达系统未来的发展趋势。本论文旨在为雷
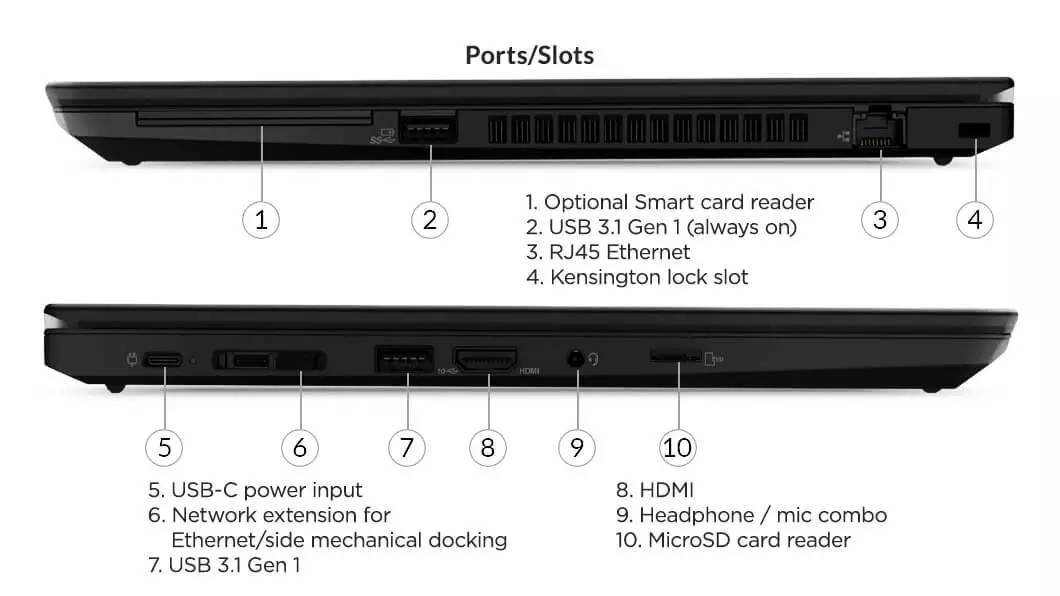
【ThinkPad T480s电路原理图深度解读】:成为硬件维修专家的必备指南
# 摘要
本文对ThinkPad T480s的硬件组成和维修技术进行了全面的分析和介绍。首先,概述了ThinkPad T480s的硬件结构,重点讲解了电路原理图的重要性及其在硬件维修中的应用。随后,详细探讨了电源系统的工作原理,主板电路的逻辑构成,以及显示系统硬件的组成和故障诊断。文章最后针对高级维修技术与工具的应用进行了深入讨论,包括
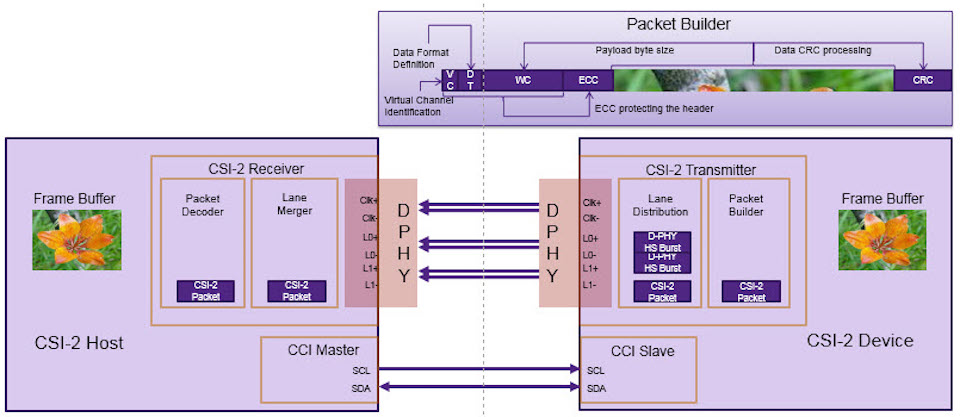
【移动行业处理器接口核心攻略】:MIPI协议全景透视
# 摘要
本文详细介绍了移动行业处理器接口(MIPI)协议的核心价值和技术原理,强调了其在移动设备中应用的重要性和优势。通过对MIPI协议标准架构、技术特点以及兼容性与演进的深入分析,本文展示了MIPI在相机、显示技术以及无线通信等方面的实用性和技术进步。此外,本文还探讨了MIPI协议的测试与调试方法,以及在智能穿戴设备、虚拟现实和增强
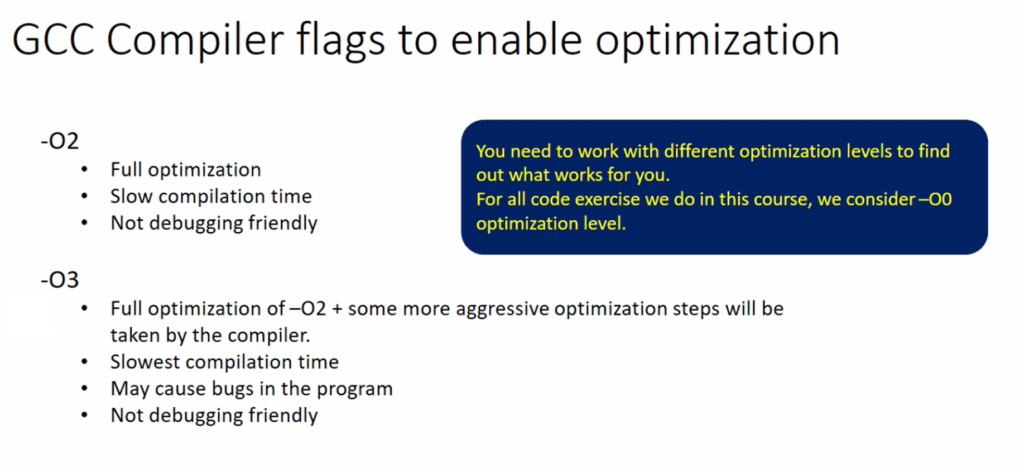
【编译器调优攻略】:深入了解STM32工程的编译优化技巧
# 摘要
本文深入探讨了STM32工程优化的各个方面,从编译器调优的理论基础到具体的编译器优化选项,再到STM32平台的特定优化。首先概述了编译器调优和STM32工程优化的理论基础,然后深入到代码层面的优化策略,包括高效编程实践、数据存取优化和预处理器的巧妙使用。接着,文章分析了编译器优化选项的重要性,包括编译器级别和链接器选项的影响,以及如何在构建系统中集成这些优化。最后,文章详
29500-2标准成功案例:组织合规性实践剖析

# 摘要
本文全面阐述了29500-2标准的内涵、合规性概念及其在组织内部策略构建中的应用。文章首先介绍了29500-2标准的框架和实施原则,随后探讨了
S7-1200_S7-1500故障排除宝典:维护与常见问题的解决方案

# 摘要
本文综述了S7-1200/S7-1500 PLC的基础知识和故障诊断技术。首先介绍PLC的硬件结构和功能,重点在于控制器核心组件以及I/O模块和接口类型。接着分析电源和接地问题,探讨其故障原因及解决方案。本文详细讨论了连接与接线故障的诊断方法和常见错误。在软件故障诊断方面,强调了程序错误排查、系统与网络故障处理以及数
无人机精准控制:ICM-42607在定位与姿态调整中的应用指南
# 摘要
无人机精准控制对于飞行安全与任务执行至关重要,但面临诸多挑战。本文首先分析了ICM-42607传感器的技术特点,探讨了其在无人机控制系统中的集成与通信协议。随后,本文深入阐述了定位与姿态调整的理论基础,包括无人机定位技术原理和姿态估计算法。在此基础上,文章详细讨论了ICM-42607在无人机定位与姿态调整中的实际应用,并通
易语言与FPDF库:错误处理与异常管理的黄金法则

# 摘要
易语言作为一门简化的编程语言,其与FPDF库结合使用时,错误处理变得尤为重要。本文旨在深入探讨易语言与FPDF库的错误处理机制,从基础知识、理论与实践,到高级技术、异常管理策略,再到实战演练与未来展望。文章详细介绍了错误和异常的概念、重要性及处理方法,并结合FPDF库的特点,讨论了设计时与运行时的错误类型、自定义与集成第三方的异常处理工具,以及面向对象中的错误处理。此外,本文还强
Linux下EtherCAT主站igh程序同步机制:实现与优化指南
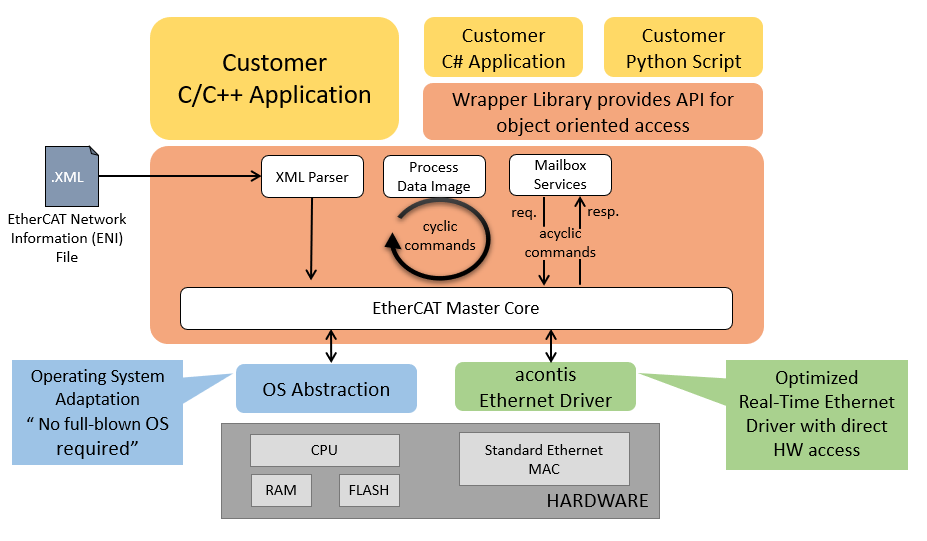
# 摘要
本文首先概述了EtherCAT技术及其同步机制的基本概念,随后详细介绍了在Linux环境下开发EtherCAT主站程序的基础知识,包括协议栈架构和同步机制的角色,以及Linux环境下的实时性强化和软件工具链安装。在此基础上,探讨了同步机制在实际应用中的实现、同步误差的控制与测量,以及同步优化策略。此外,本文还讨论了多任务同步的高级应用、基于时间戳的同步实现、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )