多线程支持深入分析:vxWorks在PowerPC平台的编程指南
发布时间: 2025-01-09 01:31:37 阅读量: 3 订阅数: 8 

基于VxWorks的PowerPC多CPU系统.pdf
# 摘要
本文对vxWorks操作系统的多线程编程进行了全面的探讨,涵盖了基础理论、核心原理、实践应用、高级技巧以及特定平台(PowerPC)的优化策略。首先介绍了多线程编程的基础知识和vxWorks的操作概述,随后详细分析了线程的基本概念、操作、同步机制以及资源管理。通过实践应用章节,本文提供了多个编程实践示例,包括线程间同步和通信、同步机制使用以及内存和文件系统的管理示例。进一步地,文章还探讨了高级线程管理和资源管理技巧,并针对PowerPC平台提出了一系列性能优化策略。最后,本文通过案例分析展现了多线程编程在实际应用中的问题解决方法,并对未来的发展方向进行了展望。
# 关键字
多线程编程;vxWorks;同步机制;资源管理;线程调度;性能优化;实时操作系统
参考资源链接:[使用CodeWarrior开发PowerPC RCW流程详解](https://wenku.csdn.net/doc/5eo0q3obi8?spm=1055.2635.3001.10343)
# 1. 多线程编程基础和vxWorks概述
## 1.1 多线程编程简介
在现代操作系统中,多线程编程是一种常见的编程范式,它允许程序中的多个部分(线程)并发执行,从而有效利用多核处理器的优势,提高应用程序的响应性和效率。多线程通过将CPU时间分配给多个线程来实现,并通过线程调度器进行管理。
## 1.2 vxWorks操作系统
vxWorks是一个实时操作系统(RTOS),广泛应用于嵌入式系统领域,特别是在那些要求高可靠性和实时性能的场合,例如航空、军事和通信设备。vxWorks以其高性能、可伸缩性和可配置性闻名。
## 1.3 多线程在vxWorks中的应用
vxWorks为开发者提供了一套完整的多线程API,使得开发者可以在vxWorks环境下轻松创建和管理多线程。其内核支持抢占式多任务处理,并且提供了丰富的同步机制来确保线程安全地访问共享资源。
在本章中,我们将了解多线程编程的基础知识,并对vxWorks操作系统进行概述,为后续章节中深入探讨vxWorks下的多线程编程实践奠定基础。
# 2. vxWorks多线程编程原理
## 2.1 线程的基本概念和操作
### 2.1.1 线程的创建和结束
在vxWorks操作系统中,创建线程是通过`taskSpawn`函数实现的。该函数定义了新线程的起始执行函数、优先级、栈大小、任务选项等参数,是实现多线程的关键。创建线程后,系统会为新线程分配资源,并开始执行在`taskSpawn`中指定的函数。
```c
#include <vxWorks.h>
#include <taskLib.h>
/* 线程函数原型 */
void threadFunction(void)
{
/* 线程执行的代码 */
}
/* 创建线程的函数 */
STATUS createThread()
{
int taskId;
int stackSize = 8192; // 栈大小,单位为字节
int priority = 50; // 优先级
int options = 0; // 任务选项
int arg1 = 1; // 函数参数
int arg2 = 2; // 函数参数
taskId = taskSpawn("tThread",
priority,
options,
stackSize,
(FUNCPTR)threadFunction,
arg1,
arg2,
0,
0,
0,
0,
0,
0,
0,
0);
if (taskId == ERROR)
{
printf("Error: Cannot create thread.\n");
return ERROR;
}
else
{
printf("Thread created with task ID %d.\n", taskId);
return OK;
}
}
```
在上述代码中,我们定义了一个线程函数`threadFunction`,并且通过`taskSpawn`创建了一个新线程。成功创建线程后,线程函数`threadFunction`会开始执行。
结束线程相对简单,一般情况下,线程会通过返回自己的线程函数来结束。如果需要立即停止线程,可以使用`taskDelete`函数,强制结束指定的线程。
### 2.1.2 线程的优先级和调度
vxWorks采用了基于优先级的调度策略,优先级高的线程可以抢占低优先级线程的CPU资源。线程的优先级是由一个整数值表示的,数值越小表示优先级越高。
```c
STATUS setThreadPriority(int taskId, int priority)
{
if (taskId == SYSTEM_NULL)
{
printf("Error: Invalid task ID.\n");
return ERROR;
}
if (taskPrioritySet(taskId, priority) == ERROR)
{
printf("Error: Cannot set priority for task ID %d.\n", taskId);
return ERROR;
}
else
{
printf("Priority set successfully for task ID %d.\n", taskId);
return OK;
}
}
```
在这段代码中,我们定义了一个函数`setThreadPriority`,用来设置给定线程的优先级。通过调用`taskPrioritySet`函数,可以改变线程的优先级,从而影响其调度顺序。
线程调度器会周期性地检查就绪队列中的最高优先级线程,并赋予CPU执行权。如果有多个线程具有相同的最高优先级,系统将根据时间片轮转算法来分配CPU时间。
## 2.2 同步机制
### 2.2.1 信号量
信号量(Semaphore)是一种常用的同步机制,在vxWorks中,信号量由`semBCreate`、`semTake`、`semGive`等函数操作。
```c
#include <semLib.h>
STATUS createSemaphore(STATUS semId)
{
semId = semBCreate(SEM_Q_PRIORITY, SEM_EMPTY);
if (semId == NULL)
{
printf("Error: Cannot create semaphore.\n");
return ERROR;
}
else
{
printf("Semaphore created with ID %d.\n", semId);
return OK;
}
}
STATUS acquireSemaphore(STATUS semId)
{
STATUS status;
status = semTake(semId, WAIT_FOREVER);
if (status == ERROR)
{
printf("Error: Cannot acquire semaphore.\n");
return ERROR;
}
else
{
printf("Semaphore acquired.\n");
return OK;
}
}
STATUS releaseSemaphore(STATUS semId)
{
STATUS status;
status = semGive(semId);
if (status == ERROR)
{
printf("Error: Cannot release semaphore.\n");
return ERROR;
}
else
{
printf("Semaphore released.\n");
return OK;
}
}
```
在这段代码中,我们定义了创建信号量、获取信号量和释放信号量的函数。信号量在多线程编程中用来控制对共享资源的访问。
### 2.2.2 互斥量
互斥量(Mutex)是另一种同步机制,用于确保对共享资源的互斥访问。在vxWorks中,互斥量的创建、获取和释放可以通过`semMCreate`、`semTake`和`semGive`函数实现。
```c
STATUS createMutex(STATUS semId)
{
semId = semMCreate(SEM_Q_PRIORITY);
if (semId == NULL)
{
printf("Error: Cannot create mutex.\n");
return ERROR;
}
else
{
printf("Mutex created with ID %d.\n", semId);
return OK;
}
}
```
在多线程程序中,互斥量的使用可以避免竞态条件,确保同一时刻只有一个线程能访问到共享资源。
### 2.2.3 消息队列
消息队列在vxWorks中可以由`msgQCreate`函数创建。消息队列允许线程间以先进先出(FIFO)的方式传递消息。
```c
STATUS createMessageQueue()
{
int msgQId;
msgQId = msgQCreate(10, sizeof(SOME_TYPE), MSG_Q_FIFO);
if (msgQId == NULL)
{
printf("Error: Cannot create message queue.\n");
return ERROR;
}
else
{
printf("Message queue created with ID %d.\n", msgQId);
return OK;
}
}
```
这里创建了一个消息队列,它能存储最多10条长度为`SOME_TYPE`大小的消息。消息队列是线程间通信的有效工具,尤其是当线程需要以有序方式交换数据时。
在vxWorks中,线程之间共享资源的同步与通信都是通过这些机制实现的。通过信号量、互斥量、消息队列等同步机制,能够有效管理多线程间的同步和协作。
# 3. vxWorks多线程编程实践
## 3.1 线程编程实践
### 3.1.1 创建多个线程的示例
在vxWorks操作系统中创建线程通常使用`taskSpawn`函数。线程在vxWorks中被称作任务(Task)。创建任务的关键参数包括任务名称、优先级、堆栈大小、任务入口点函数以及传递给任务入口点函数的参数。
```c
STATUS taskSpawn(
char *name, /* 任务名称 */
int priority, /* 任务优先级 */
int options, /* 创建选项 */
int stackSize, /* 堆栈大小 */
FUNCPTR entry, /* 任务入口点函数 */
int arg1, /* 传递给入口函数的第一个参数 */
int arg2, /* 传递给入口函数的第二个参数 */
int arg3, /* 传递给入口函数的第三个参数 */
int arg4, /* 传递给入口函数的第四个参数 */
int arg5, /* 传递给入口函数的第五个参数 */
int arg6 /* 传递给入口函数的第六个参数 */
);
```
任务创建示例:
```c
#include <taskLib.h>
void myTaskEntry(int arg)
{
// 任务执行的代码
}
int main(int argc, char *argv[])
{
int task1Id, task2Id;
// 创建第一个任务
task1Id = taskSpawn("myTask1", 100, 0, 2000, (FUNCPTR)myTaskEntry,
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
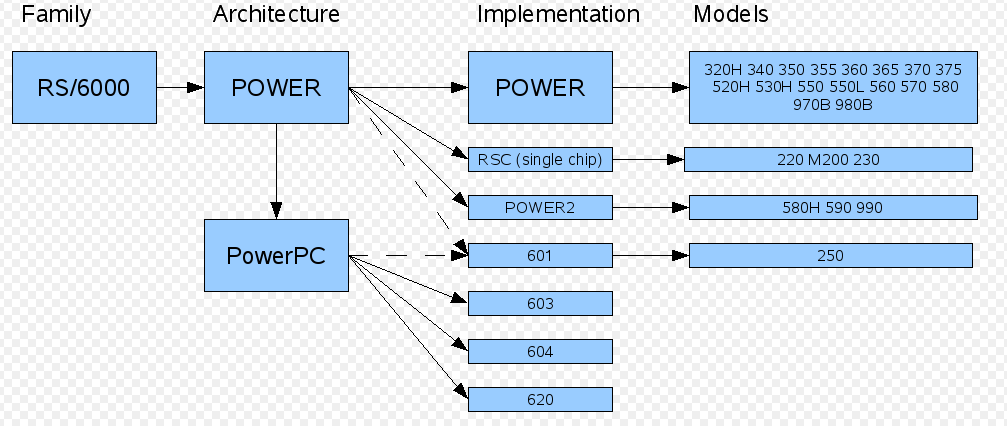
本专栏深入探讨了 PowerPC 架构和 vxWorks 操作系统之间的协同作用,提供了一系列专家指南和最佳实践,帮助开发人员优化 PowerPC 平台上的 vxWorks 系统。涵盖的主题包括:
* PowerPC 架构的性能优化秘诀
* PowerPC 与 vxWorks 的协作指南
* 多核 PowerPC 性能调优案例研究
* vxWorks 中断处理优化
* 任务调度和同步技巧
* 硬件特性和内核定制
* 驱动开发和调试
* 跨平台开发迁移
* 故障诊断和排除
* 高可用性解决方案
* 多任务编程高级技巧
* 网络编程性能提升
* 多线程支持深入分析
* 性能监控工具和方法
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【避免法律雷区】:许可证合规性实践指南

# 摘要
随着软件产业的迅猛发展,许可证合规性成为确保企业合法使用软件资源的重要议题。本文首先介绍了许可证合规性的基本概念,然后详细分析了不同类型的软件许可证,包括开源、商业以及混合型许可证,并对比了它们的特点和实施策略。第三章阐述了许可证合规性检查流程,包括审查要点、风险评估与管理,以及审计与监控的方法。第四章通过案
JQuery Ajax大数据传输案例分析:高效传输与错误处理最佳实践

# 摘要
本文首先回顾了JQuery Ajax的基础知识,随后探讨了大数据传输的挑战和优化策略,重点分析了数据压缩、分页与懒加载、缓存策略等技术对提升大数据处理效率的重要性。文章第三部分深入阐述了JQuery Ajax的实践技巧,包括配置优化、数据处理以及错误处理机制,旨在提高开发者使用Ajax处理数据的能力。第四章通过案例分析,展示了在实际应用中如何优化
【初学者必备】:CRC校验原理与实现全面指南

# 摘要
循环冗余校验(CRC)是一种用于检测数据传输或存储中错误的广泛使用的校验方法。本文从CRC校验的基本概念开始,深入探讨了其理论基础,包括数据校验的重要性、数学原理,以及不同CRC校验算法的种类和比较。文章接着分析了CRC校验的硬件与软件实现技术,并阐述了其在不同领域,如网络
VB6.0编程语言复兴指南

# 摘要
本文对VB6.0编程语言进行了全面介绍,涵盖了基础语法、图形用户界面设计、数据库编程、网络编程与通信以及未来发展趋势等方面。VB6.0,作为一款历史悠
【信号质量与时序测试黄金法则】:专家揭秘硬件设计的核心技巧
# 摘要
随着电子硬件的复杂性日益增加,信号质量和时序测试在硬件设计和验证中扮演着关键角色。本文探讨了信号质量与时序测试的重要性,从理论到实践深入分析了信号完整性、时序分析与优化、信号完整性测试以及改进策略。文中详细介绍了硬件设计基础、时钟树合成、信号同步、自动化测试框架等关键技术,并通过实际案例强调了硬件测试与验证高级技
【SAP月结与报表自动化】:4个技巧,实现报表生成的革命性提升

# 摘要
随着企业信息系统的复杂性增加,SAP月结与报表自动化成为提高效率和减少错误的关键环节。本文系统性地阐述了SAP月结流程,包括理论基础、关键业务场景分析、实践中的步骤与问题解决。同时,深入探讨了报表自动化的需求分析、工具选择、实现技巧,以及如何优化数据抽取与分析,实现报表的自动化发布与分发。通过案例分析,展示了SAP月结自动化和自动化报表生成的实施过程及创新应用。文章最后对未来的趋势进行
FreeFEM网格生成技术深度解析:专家级别的进阶之路

# 摘要
FreeFEM是一种广泛使用的有限元方法软件,其高效的网格生成技术是实现复杂计算问题数值解的关键。本文从基础理论入手,全面介绍了FreeFEM中网格生成的数学基础、类型、结构以及相关算法。文章深入探讨了实践应用,包括脚本编写、高级控制技术及案例分析,展示了如何处理复杂几何区域和多物理场耦合问题。此外,本文还分析了网格优化与后处理方法,强调了高质量网格生成对计算精度的重要性。最后,本文展望了FreeFEM网格
STM8L051F3P6中断机制剖析:事件处理的高效策略

# 摘要
本文全面探讨了STM8L051F3P6微控制器的中断机制,从基础理论到深入分析,再到实践应用和高级管理技术。文章首先介绍中断系统的基本概念、类型、优先级以及中断向量和中断服务程序的编写执行。随后,深入分析中断响应处理、嵌套、优先级管理以及系统稳定性和延迟问题。在实践应用方面,讨论了中断管理在编程和事件驱动中的技巧、中断调试与性能优化。进一步,分析了R
LOGIX 5000高级功能应用:实现复杂控制逻辑的秘密武器
# 摘要
本文全面介绍了LOGIX 5000平台的基本概念、控制结构、数据管理、高级编程技术、实时监控与诊断、复杂控制逻辑案例分析以及系统性能优化与未来展望。首先概述了LOGIX 5000的基础配置和核心功能,随后深入探讨了其控制结构设计原则、状态机、序列控制以及数据类型和内存映射。文中还涵盖了编程环境和工具的使用,如RSLogix 5000
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )