OpenCV在ROS中的图像处理技术:机器人视觉的基础
发布时间: 2024-08-14 04:16:13 阅读量: 66 订阅数: 37 

基于ROS系统的视觉处理流程及其二次开发指南

# 1. 图像处理基础**
图像处理是一门涉及对数字图像进行操作的学科。它广泛应用于计算机视觉、医学成像、遥感和工业自动化等领域。图像处理算法可以用于增强图像质量、提取特征、分析内容并进行图像合成。
数字图像本质上是二维数据数组,其中每个元素表示图像中特定位置的像素强度。图像处理算法通过对这些像素值进行操作来执行各种任务。常见的图像处理操作包括图像增强(例如,调整对比度和亮度)、图像滤波(例如,去噪和边缘检测)以及图像分割(例如,将图像划分为不同的区域)。
# 2. OpenCV在ROS中的图像处理
### 2.1 ROS中的图像处理框架
ROS(机器人操作系统)是一个用于构建机器人应用程序的开源框架。它提供了一个强大的生态系统,包括库、工具和社区支持,用于开发、部署和维护机器人系统。ROS中的图像处理功能由OpenCV(Open Source Computer Vision Library)库提供。
### 2.2 OpenCV与ROS的集成
OpenCV与ROS的集成通过`cv_bridge`包实现,该包提供了一个桥梁,允许在ROS和OpenCV之间转换图像数据。`cv_bridge`包包含`CvBridge`类,它可以将OpenCV图像转换为ROS图像消息,反之亦然。
### 2.3 图像采集与预处理
在ROS中进行图像处理的第一步是采集图像数据。这可以通过使用ROS相机驱动程序从相机设备或图像文件读取图像来实现。一旦采集到图像,就可以对其进行预处理以提高图像处理算法的性能。常见的预处理技术包括:
- **图像缩放:**调整图像大小以减少计算成本。
- **图像转换:**将图像从一种颜色空间(如RGB)转换为另一种颜色空间(如灰度)。
- **图像滤波:**使用滤波器(如高斯滤波器)去除图像中的噪声。
```python
import cv2
import cv_bridge
# 从相机设备采集图像
image_raw = rospy.wait_for_message("/camera/image_raw", sensor_msgs.Image)
# 使用CvBridge将ROS图像消息转换为OpenCV图像
image = cv_bridge.CvBridge().imgmsg_to_cv2(image_raw, "bgr8")
# 图像预处理:缩放、转换和滤波
image = cv2.resize(image, (640, 480))
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
image = cv2.GaussianBlur(image, (5, 5), 0)
```
# 3. 图像处理算法在ROS中的应用**
### 3.1 图像分割与目标识别
图像分割是将图像分解为具有相似特征(如颜色、纹理、形状等)的区域的过程。在ROS中,图像分割算法广泛用于目标识别和场景理解。
#### 3.1.1 图像分割方法
ROS中常用的图像分割方法包括:
- **阈值分割:**根据像素强度或其他特征将图像划分为不同的区域。
- **区域生长:**从种子像素开始,将具有相似特征的像素逐步合并到区域中。
- **分水岭算法:**将图像视为地形,将像素视为水滴,并根据像素之间的相似性将它们分配到不同的汇水盆地。
#### 3.1.2 目标识别
目标识别是确定图像中特定对象的边界框或掩码的过程。ROS中常用的目标识别算法包括:
- **滑动窗口:**在图像上滑动一个窗口,并使用分类器对窗口内的像素进行分类。
- **区域建议网络(RPN):**生成潜在目标区域的建议框,然后使用分类器对建议框进行分类。
- **YOLO(You Only Look Once):**将图像划分为网格,并预测每个网格单元中的对象和其边界框。
### 3.2 图像特征提取与匹配
图像特征提取是识别图像中重要特征的过程。在ROS中,图像特征提取算法用于对象跟踪、场景分类和机器人定位。
#### 3.2.1 图像特征类型
ROS中常用的图像特征类型包括:
- **局部特征:**描述图像局部区域,如SIFT(尺度不变特征变换)和SURF(加速稳健特征)。
- **全局特征:**描述整个图像,如HOG(直方图梯度)和LBP(局部二值模式)。
#### 3.2.2 特征匹配
特征匹配是找到两幅图像中对应特征的过程。ROS中常用的特征匹配算法包括:
- **暴力匹配:**逐一对图像中的所有特征进行比较。
- **最近邻匹配:**为每个特征找到距离最近的匹配特征。
- **快速最近邻匹配(FLANN):**使用近似最近邻搜索算法提高匹配速度。
### 3.3 图像变换与畸变校正
图像变换是修改图像几何形状的过程。在ROS中,图像变换算法用于图像配准、透视校正和图像增强。
#### 3.3.1 图像变换类型
ROS中常用的图像变换类型包括:
- **平移:**将图像沿水平或垂直方向移动。
- **旋转:**将图像绕其中心旋转。
- **缩放:**改变图像的大小。
- **透视变换:**将图像投影到不同表面上。
#### 3.3.2 畸变校正
畸变校正用于补偿相机镜头或传感器引起的图像失真。ROS中常用的畸变校正算法包括:
- **径向

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏深入探讨了 ROS(机器人操作系统)和 OpenCV(计算机视觉库)在机器人视觉中的协同作用。它涵盖了从感知到决策的各个方面,提供了详细的指南和实际案例。专栏标题包括物体识别算法、图像处理技术、图像处理协作和效率优化。通过这些文章,读者可以了解 ROS 和 OpenCV 如何为机器人赋予视觉感知能力,并将其应用于各种任务,如物体识别、图像处理和复杂任务的决策。该专栏旨在为机器人视觉开发人员和研究人员提供全面的资源,帮助他们构建强大的机器人视觉系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
超级电容充电技术大揭秘:全面解析9大创新应用与优化策略
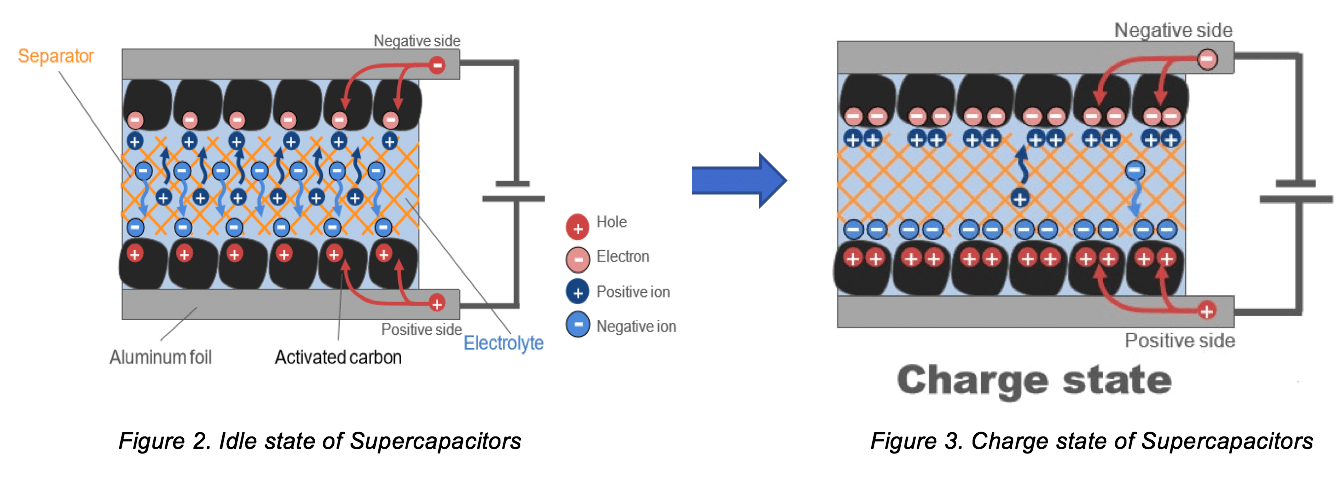
# 摘要
超级电容器作为能量存储与释放的前沿技术,近年来在快速充电及高功率密度方面显示出巨大潜力。本文系统回顾了超级电容器的充电技术,从其工作原理、理论基础、充电策略、创新应用、优化策略到实践案例进行了深入探讨。通过对能量回收系统、移动设备、大型储能系统中超级电容器应用的分析,文章揭示了充电技术在不同领域中的实际效益和优化方向。同时,本文还展望了固态超级电容器等新兴技术的发展前景以及超级电
【IAR嵌入式系统新手速成课程】:一步到位掌握关键入门技能!
# 摘要
本文介绍了IAR嵌入式系统的安装、配置及编程实践,详细阐述了ARM处理器架构和编程要点,并通过实战项目加深理解。文章首先提供了IAR Embedded Workbench的基础介绍,包括其功能特点和安装过程。随后深入讲解了ARM处理器的基础知识,实践编写汇编语言,并探讨了C语言与汇编的混合编程技巧。在编程实践章节中,回顾了C语言基础,使用IAR进行板级支持包的开发,并通过一个实战项目演示了嵌入式系统的开发流程。最后,本文探讨了高级功能,如内存管理和性能优化,调试技术,并通过实际案例来解决常见问题。整体而言,本文为嵌入式系统开发人员提供了一套完整的技术指南,旨在提升其开发效率和系统性能
DSP28335与SPWM结合秘籍:硬件和软件实现的完整指南
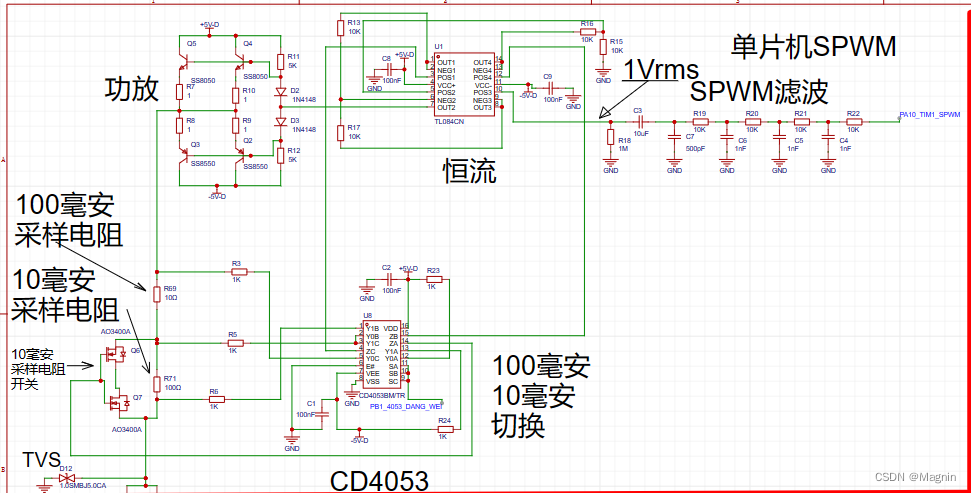
# 摘要
本文介绍了DSP28335微控制器的基础知识,并深入探讨了SPWM(正弦脉宽调制)技术的理论及其在电机控制中的应用。文章详细阐述了SPWM的基本原理、电机控制优势以及信号的生成方法,同时结合DSP28335微控制器的硬件架构,提出了SPWM信号输出电路设计的方案,并详细描述了硬件调试与测试过程。在软件实现方面,本文讨论了DSP28335的软件开发环境、SPWM控制算法编程
【C++二叉树算法精讲】:从实验报告看效率优化关键

# 摘要
本文详细探讨了C++中二叉树的概念、算法理论基础、效率分析、实践应用以及进阶技巧。首先,介绍了二叉树的基本概念和分类,包括完全二叉树、满二叉树、平衡二叉树和红黑树等。随后,对二叉树的遍历算法,如前序、中序、后序和层序遍历进行了讨论。本文还分析了二叉树构建和修改的操作,包括创建、删除和旋转。第三章专注于二叉树算法的效率,讨论了时间复杂度、空间复杂度和算法优化策略。第四章探讨了二叉树
Origin图表设计秘籍:这7种数据展示方式让你的报告更专业

# 摘要
本论文深入探讨了Origin图表设计的全面概述,从基础理论到高级技巧,再到在数据报告中的实际应用,以及未来的发展趋势。文章首先阐述了数据可视化的基本理论,强调了其在信息传达和决策支持方面的重要性,并介绍了不同图表类型及其设计原则。接着,通过七种专业图表的设计实践,详细解释了各种图表的特点、适用场景及其设计要点。文章还介绍了Origin图表的高级技巧,包括模板创建、数据处理和交互式图
【故障录波系统接线实战】:案例分析与故障诊断处理流程
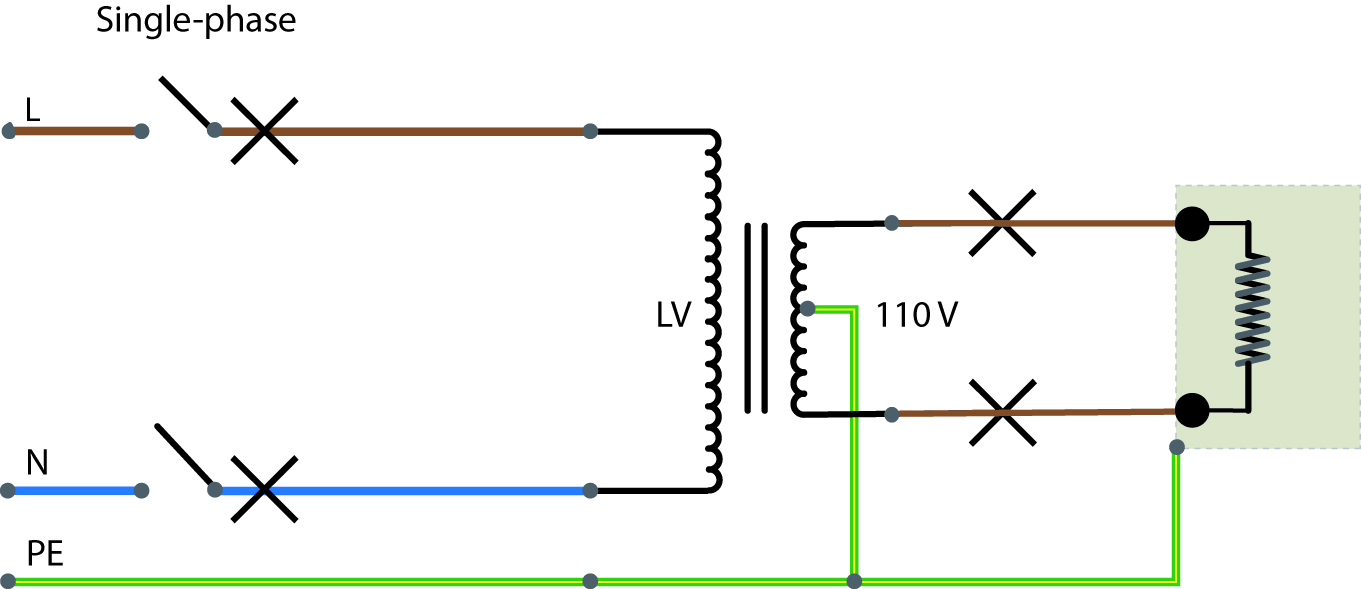
# 摘要
故障录波系统是一种用于电力系统故障检测和分析的关键技术,它对维护电网的稳定运行和提高故障诊断的效率具有重要意义。本文首先概述了故障录波系统及其应用背景,然后详细介绍了系统的硬件组成,包括数据采集、处理与存储单元,以及硬件故障的诊断与排查方法。接着,本文探讨了故障录波系统的软件架构,包括功能模块、操作流程和界面介绍,并且分析了软件故障的诊断与优化。实战案例分析部分通过具体案例,展示了故障录波数据的解读和故障处理流程。
PHY6222蓝牙芯片全攻略:性能优化与应用案例分析

# 摘要
本文对PHY6222蓝牙芯片进行了全面的概述,详细分析了其在硬件、软件以及系统层面的性能优化方法,并通过实际案例加以说明。同时,探讨了PHY6222蓝牙芯片在智能设备、医疗设备和智能家居等多种应用中的具体应用案例,以及其面临的市场趋势和未来发展的挑战与机遇。本文旨在为相关领域的研究者和开发者提供深入的技术洞察,并为PHY6222蓝牙芯片的进一步技术创新和市场应用提供参考。
大数据项目中的DP-Modeler应用:从理论到实战的全面剖析
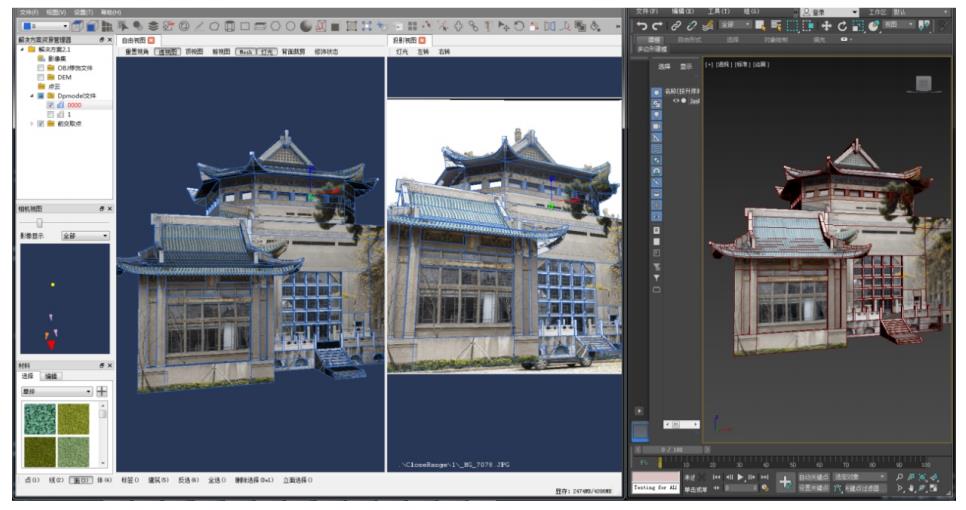
# 摘要
本文深入探讨了大数据项目实施的关键环节,并着重介绍了DP-Modeler工具的基本原理、实践操作和高级应用。文章首先概述了大数据项目的重要性,并简要介绍了DP-Modeler的数据模型及其架构。随后,文章详细阐述了DP-Modeler的安装、配置、基础使用以及实践操作中的数据预处理、模型构建和部署监控方法。此外,高级应用章节涵盖了复杂数据处理、自动化流程及在分布
【AB-PLC中文指令集:高效编程指南】:编写优秀代码的关键技巧

# 摘要
本文全面介绍了AB-PLC中文指令集及其在PLC编程中的应用。首先概述了AB-PLC中文指令集的基础知识,随后深入探讨了PLC的工作原理和架构、数据类型与寻址模式,以及中文指令集的语法结构。在PLC程序开发流程章节中,本文详述了编写程序前的准备、中文指令集的编程实践以及程序测试与调试技巧。接着,本文进一步探索了高级编程技术,包括结构化编程方法、高级指令应用技巧以及PLC与
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )