图像处理中的特征提取技术:SIFT算法详解
发布时间: 2023-12-20 11:49:36 阅读量: 72 订阅数: 27 

白色简洁风格的软件UI界面后台管理系统模板.zip
## 第一章:图像处理中的特征提取概述
### 1.1 图像特征提取的背景与意义
在图像处理领域,图像特征提取是指从图像中提取出具有代表性、能够表达图像重要信息的特征点或特征描述子的过程。图像特征提取具有重要意义,它能够帮助计算机理解图像、识别图像中的目标、进行图像匹配和比对等应用。
### 1.2 常见的图像特征提取方法概述
常见的图像特征提取方法包括SIFT、SURF、ORB等。这些方法在尺度不变性、光照不变性、旋转不变性等方面具有不同的特点和优势,适用于不同的图像处理场景。
### 1.3 SIFT算法在特征提取中的地位与作用
SIFT(Scale-Invariant Feature Transform)算法是一种基于局部特征的图像特征提取算法,具有尺度不变性、旋转不变性等优点,在目标识别、图像拼接、三维重建等领域有着广泛的应用。SIFT算法的提出极大地推动了图像处理和计算机视觉领域的发展,成为了图像特征提取领域的重要里程碑之一。
## 第二章:SIFT算法的基础理论
### 2.1 尺度空间与高斯模糊
SIFT算法的核心思想之一是尺度不变性,通过构建尺度空间对图像进行多尺度分析。尺度空间构建的第一步是使用高斯函数对原始图像进行模糊操作,得到一系列不同尺度的图像。高斯模糊操作可以通过一维高斯核与图像进行卷积来实现。对于图像的不同尺度空间,SIFT算法使用了高斯差分(Difference of Gaussian, DoG)来获取图像的局部极值点,同时尺度空间的构建也为后续的关键点检测奠定了基础。
### 2.2 关键点检测与描述
SIFT算法通过在高斯金字塔的不同尺度空间上计算DoG,从而获得图像的关键点。对于每个像素点,在每个尺度上比较其与相邻像素点的灰度值,从而找到局部极值点。这些局部极值点往往对应着图像中的角点或边缘等显著特征点。为了获得稳定的关键点,SIFT算法还对检测到的关键点进行了精确定位,并剔除低对比度和边缘响应较差的关键点。
### 2.3 方向分配与关键点描述子生成
在确定了关键点的位置和尺度后,SIFT算法通过检测局部区域的梯度方向,建立描述子来表征关键点的局部特征。描述子是一个128维的向量,它包含了关键点周围区域的梯度直方图统计信息。这些描述子具有一定的旋转不变性和尺度不变性,能够很好地描述关键点周围的特征信息。
### 第三章:SIFT算法的关键步骤详解
SIFT(Scale-Invariant Feature Transform)算法是一种用于图像处理与计算机视觉中的特征提取算法,其核心在于提取图像中的关键点并生成描述子,从而实现图像的匹配与识别。SIFT算法包含了多个关键步骤,本章将对SIFT算法的关键步骤进行详细解析。
#### 3.1 尺度空间构建
SIFT算法首先通过高斯差分金字塔构建尺度空间,该过程旨在发现图像中不同尺度下的关键点。具体步骤如下:
```python
import cv2
import numpy as np
def build_gaussian_pyramid(image, num_octaves, num_scales):
gaussian_pyramid = []
k = 2**(1/num_scales)
for _ in range(num_octaves):
octave_images = [image]
for _ in range(num_scales + 3):
image = cv2.GaussianBlur(image, (0, 0), sigmaX=2.0)
octave_images.append(image)
gaussian_pyramid.append(octave_images)
image = cv2.resize(image, (int(image.shape[1] / 2), int(image.shape[0] / 2)), interpolation=cv2.INTER_NEAREST)
return np.array(gaussian_pyramid)
image = cv2.imread('example.jpg', 0)
num_octaves = 4
num_scales = 5
gaussian_pyramid = build_gaussian_pyramid(image, num_octaves, num_scales)
```
通过以上代码,我们可以构建出高斯金字塔,用于提取不同尺度空间下的图像特征。
#### 3.2 极值点检测
在尺度空间构建完毕后,SIFT算法通过对高斯差分金字塔的每层图像进行极值点检测,以定位潜在的关键点。
```python
def find_keypoints(gaussian_pyramid):
keypoints = []
for octave_images in gaussian_pyramid:
for i in range(1, len(octave_images) - 1):
for j in range(1, octave_images[i].shape[0] - 1):
for k in range(1, octave_images[i].shape[1] - 1):
candidate_keypoint = (i, j, k)
if is_keypoint(octave_images, candidate_keypoint):
keypoints.append(candidate_keypoint)
return keypoints
def is_keypoint(octave_images, candidate_keypoint):
layer_index, y, x = candidate_keypoint
value = octave_images[layer_index][y, x]
for i in range(-1, 2):
for j in range(-1, 2):
for k in range(-1, 2):
if octave_images[layer_index + i, y + j, x + k] <= value and (i, j, k) != (0, 0, 0):
return False
return True
keypoints = find_keypoints(gaussian_pyramid)
```
以上代码演示了如何通过高斯差分金字塔进行极值点检测,找到潜在的关键点。
#### 3.3 关键点的定位与精确定位
在极值点检测完毕后,SIFT算法通过对关键点

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏以"图像识别算法"为主题,深入介绍了图像处理与识别领域的各种算法及其应用。首先对图像识别算法进行了简介及应用领域概述,为读者提供了全面的认识。随后从基础的OpenCV图像处理开始,逐步深入讨论了HSV与RGB色彩空间转换、边缘检测算法以及基于Sobel算子和Canny算法的实战应用等内容。此外,还介绍了基于Haar特征的物体检测与识别、主成分分析(PCA)在图像识别中的应用、相关性滤波器在模式匹配中的作用等专题。同时也从特征提取技术的角度详解了SIFT算法,以及介绍了基于手势交互的图像识别技术及开发实战。此外,还深入讨论了卷积神经网络(CNN)、深度学习框架TensorFlow、K近邻算法、支持向量机(SVM)、AdaBoost算法以及Gabor滤波器的原理与在图像识别中的应用。最后,还介绍了基于深度学习的目标检测技术研究,为读者提供了完整的图像识别算法知识体系。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘雷达信号处理:从脉冲到频谱的魔法转换
# 摘要
本文对雷达信号处理技术进行了全面概述,从基础理论到实际应用,再到高级实践及未来展望进行了深入探讨。首先介绍了雷达信号的基本概念、脉冲编码以及时间域分析,然后深入研究了频谱分析在雷达信号处理中的基础理论、实际应用和高级技术。在高级实践方面,本文探讨了雷达信号的采集、预处理、数字化处理以及模拟与仿真的相关技术。最后,文章展望了人工智能、新兴技术对雷达信号处理带来的影响,以及雷达系统未来的发展趋势。本论文旨在为雷
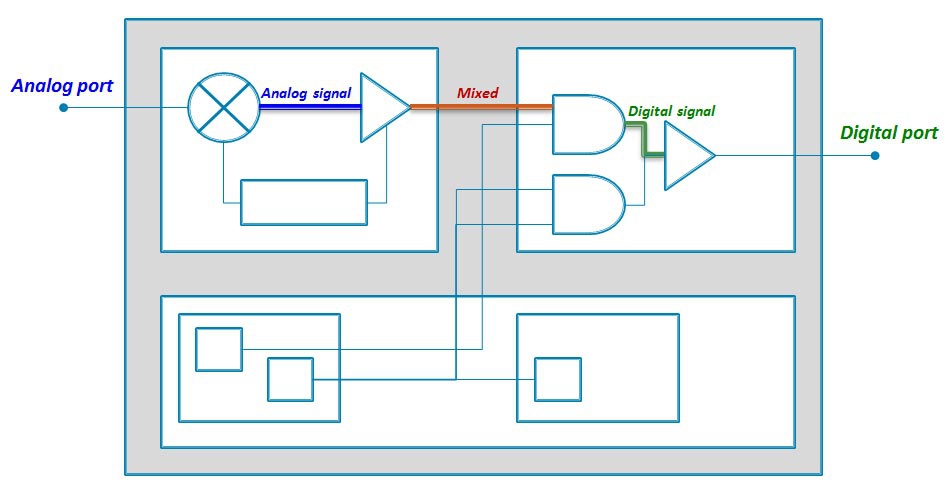
【ThinkPad T480s电路原理图深度解读】:成为硬件维修专家的必备指南
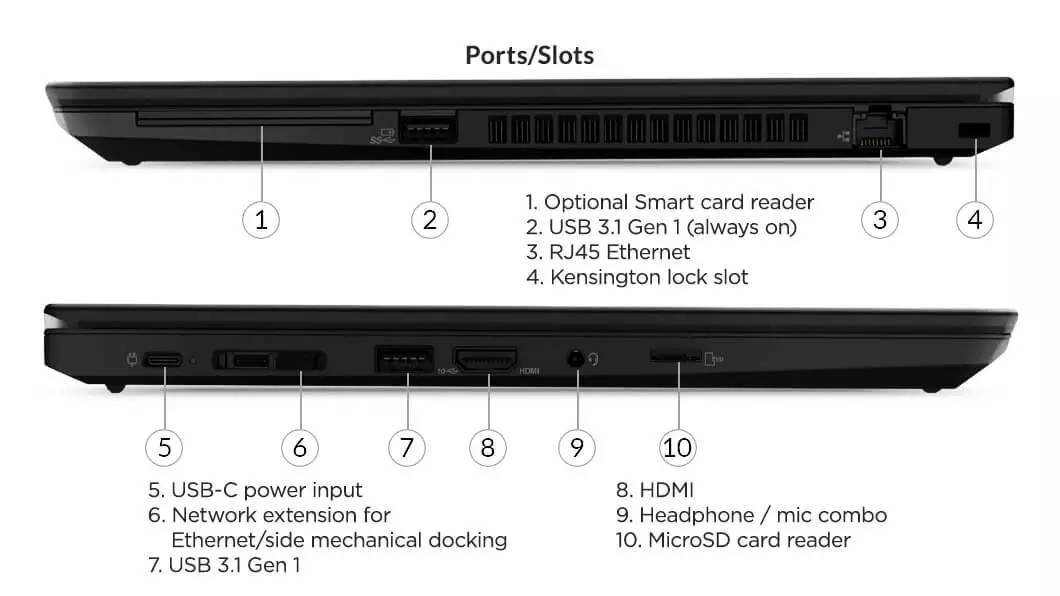
# 摘要
本文对ThinkPad T480s的硬件组成和维修技术进行了全面的分析和介绍。首先,概述了ThinkPad T480s的硬件结构,重点讲解了电路原理图的重要性及其在硬件维修中的应用。随后,详细探讨了电源系统的工作原理,主板电路的逻辑构成,以及显示系统硬件的组成和故障诊断。文章最后针对高级维修技术与工具的应用进行了深入讨论,包括
【移动行业处理器接口核心攻略】:MIPI协议全景透视
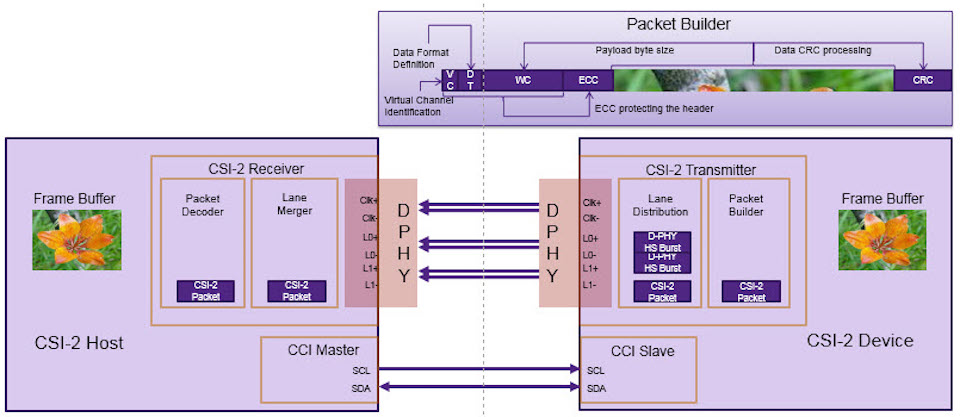
# 摘要
本文详细介绍了移动行业处理器接口(MIPI)协议的核心价值和技术原理,强调了其在移动设备中应用的重要性和优势。通过对MIPI协议标准架构、技术特点以及兼容性与演进的深入分析,本文展示了MIPI在相机、显示技术以及无线通信等方面的实用性和技术进步。此外,本文还探讨了MIPI协议的测试与调试方法,以及在智能穿戴设备、虚拟现实和增强
【编译器调优攻略】:深入了解STM32工程的编译优化技巧
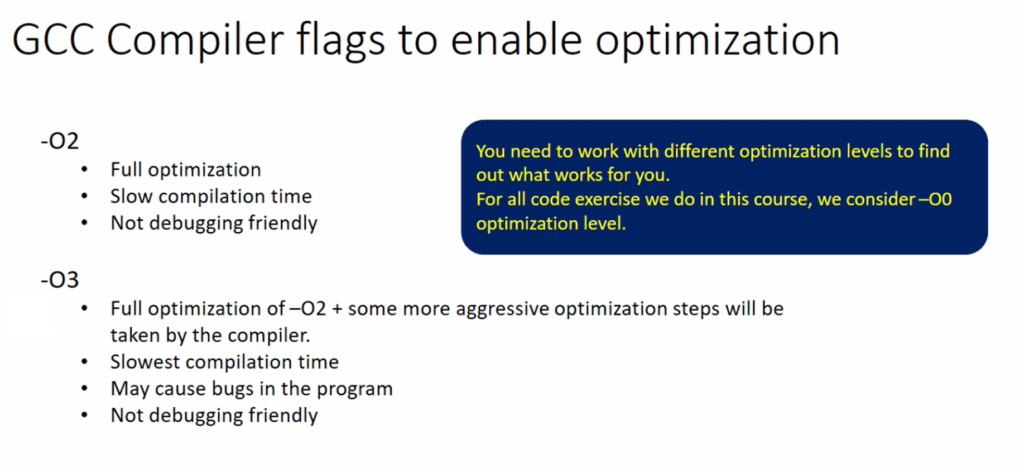
# 摘要
本文深入探讨了STM32工程优化的各个方面,从编译器调优的理论基础到具体的编译器优化选项,再到STM32平台的特定优化。首先概述了编译器调优和STM32工程优化的理论基础,然后深入到代码层面的优化策略,包括高效编程实践、数据存取优化和预处理器的巧妙使用。接着,文章分析了编译器优化选项的重要性,包括编译器级别和链接器选项的影响,以及如何在构建系统中集成这些优化。最后,文章详
29500-2标准成功案例:组织合规性实践剖析

# 摘要
本文全面阐述了29500-2标准的内涵、合规性概念及其在组织内部策略构建中的应用。文章首先介绍了29500-2标准的框架和实施原则,随后探讨了
S7-1200_S7-1500故障排除宝典:维护与常见问题的解决方案

# 摘要
本文综述了S7-1200/S7-1500 PLC的基础知识和故障诊断技术。首先介绍PLC的硬件结构和功能,重点在于控制器核心组件以及I/O模块和接口类型。接着分析电源和接地问题,探讨其故障原因及解决方案。本文详细讨论了连接与接线故障的诊断方法和常见错误。在软件故障诊断方面,强调了程序错误排查、系统与网络故障处理以及数
无人机精准控制:ICM-42607在定位与姿态调整中的应用指南
# 摘要
无人机精准控制对于飞行安全与任务执行至关重要,但面临诸多挑战。本文首先分析了ICM-42607传感器的技术特点,探讨了其在无人机控制系统中的集成与通信协议。随后,本文深入阐述了定位与姿态调整的理论基础,包括无人机定位技术原理和姿态估计算法。在此基础上,文章详细讨论了ICM-42607在无人机定位与姿态调整中的实际应用,并通
易语言与FPDF库:错误处理与异常管理的黄金法则

# 摘要
易语言作为一门简化的编程语言,其与FPDF库结合使用时,错误处理变得尤为重要。本文旨在深入探讨易语言与FPDF库的错误处理机制,从基础知识、理论与实践,到高级技术、异常管理策略,再到实战演练与未来展望。文章详细介绍了错误和异常的概念、重要性及处理方法,并结合FPDF库的特点,讨论了设计时与运行时的错误类型、自定义与集成第三方的异常处理工具,以及面向对象中的错误处理。此外,本文还强
Linux下EtherCAT主站igh程序同步机制:实现与优化指南
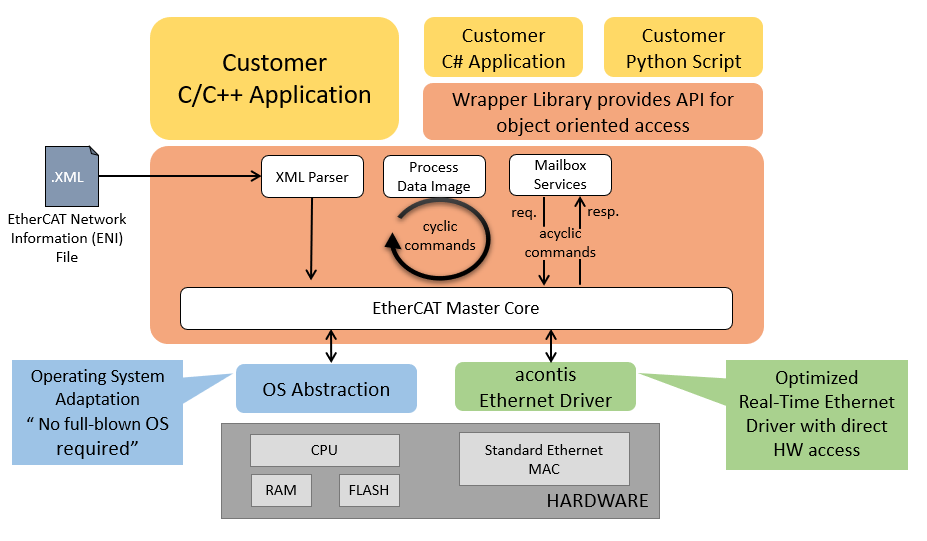
# 摘要
本文首先概述了EtherCAT技术及其同步机制的基本概念,随后详细介绍了在Linux环境下开发EtherCAT主站程序的基础知识,包括协议栈架构和同步机制的角色,以及Linux环境下的实时性强化和软件工具链安装。在此基础上,探讨了同步机制在实际应用中的实现、同步误差的控制与测量,以及同步优化策略。此外,本文还讨论了多任务同步的高级应用、基于时间戳的同步实现、
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )