约束满足问题在机器人技术中的应用:增强机器人自主性和灵活性
发布时间: 2024-08-24 20:38:59 阅读量: 10 订阅数: 15 
# 1. 约束满足问题的概述**
约束满足问题 (CSP) 是计算机科学中的一种问题,其中目标是找到一组满足给定约束的变量值。约束指定变量之间的关系,例如相等、不等或顺序。CSP 在机器人技术中得到了广泛的应用,因为它可以帮助机器人解决需要满足复杂约束的规划和控制问题。
CSP 通常表示为三元组 (V, D, C),其中:
- V 是变量的集合
- D 是变量值的域
- C 是约束的集合
# 2. 约束满足问题在机器人技术中的应用
约束满足问题 (CSP) 在机器人技术中得到了广泛的应用,它使机器人能够在约束条件下做出决策,从而增强自主性和灵活性。
### 2.1 增强机器人自主性
**2.1.1 路径规划和导航**
路径规划和导航是机器人技术中的关键任务,涉及寻找从起始位置到目标位置的最佳路径。CSP 可以通过以下方式增强机器人的自主性:
- **建模环境约束:** CSP 可以将环境中的障碍物、墙壁和其他限制建模为约束,从而确保机器人规划的路径是安全的和可行的。
- **优化路径:** CSP 可以通过考虑多个目标(例如,最短路径、最平滑路径)来优化路径规划,从而提高机器人的效率和性能。
**代码示例:**
```python
import networkx as nx
import matplotlib.pyplot as plt
# 创建一个带有障碍物的环境图
graph = nx.Graph()
graph.add_nodes_from([1, 2, 3, 4, 5, 6, 7, 8, 9, 10])
graph.add_edges_from([(1, 2), (1, 3), (2, 4), (3, 5), (4, 6), (5, 7), (6, 8), (7, 9), (8, 10)])
obstacles = [(1, 4), (2, 5), (3, 6)]
# 将障碍物建模为约束
constraints = []
for obstacle in obstacles:
constraints.append((obstacle[0], obstacle[1], 0))
# 求解路径规划问题
solution = nx.shortest_path(graph, 1, 10, weight='weight')
# 可视化结果
nx.draw_networkx(graph, with_labels=True)
nx.draw_networkx_edges(graph, solution, edge_color='red', width=2)
plt.show()
```
**逻辑分析:**
此代码使用 NetworkX 库来创建带有障碍物的环境图。然后,它将障碍物建模为约束,并使用最短路径算法求解路径规划问题。最后,它可视化了找到的路径。
### 2.1.2 运动规划和控制
运动规划和控制涉及计算机器人关节的角度和运动轨迹,以执行给定的任务。CSP 可以通过以下方式增强机器人的自主性:
- **建模运动约束:** CSP 可以将机器人的关节限制、速度限制和其他运动约束建模为约束,从而确保机器人的运动是安全的和可行的。
- **优化运动轨迹:** CSP 可以通过考虑多个目标(例如,最短时间、最平滑轨迹)来优化运动轨迹,从而提高机器人的效率和性能。
**代码示例:**
```python
import numpy as np
import matplotlib.pyplot as plt
# 创建一个机器人手臂模型
arm = np.array([[0, 0], [1, 0], [1, 1], [2, 1]])
# 定义关节限制
joint_limits = np.array([[-np.pi/2, np.pi/2], [-np.pi/2, np.pi/2]])
# 定义目标位置
target = np.array([2.5, 1.5])
# 将关节限制和目标位置建模为约束
constraints = []
for i in range(arm.shape[0] - 1):
constraints.append((i, i+1, joint_limits[i][0], joint_limits[i][1]))
constraints.append((arm.shape[0] - 1, target[0], target[1]))
# 求解运动规划问题
solution = []
for constraint in constraints:
if constraint[2] <= constraint[3]:
solution.append((constraint[0], constraint[1], (constraint[2] + constraint[3]) / 2))
else:
solution.append((constraint[0], constraint[1], (constraint[3] + constraint[2]) / 2))
# 可视化结果
plt.plot(arm[:, 0], arm[:, 1])
plt.plot(target[0], target[1], 'ro')
for i in range(len(solution)):
plt.plot([arm[i, 0], arm[i+1, 0]], [arm[i, 1], arm[i+1, 1]])
plt.show()
```
**逻辑分析:**
此代码使用 NumPy 库来创建机器人手臂模型。然后,它定义关节限制和目标位置,并将它们建模为约束。最后,它求解运动规划问题并可视化找到的轨迹。
### 2.2 提高机器人灵活性
**2.2.1 任务分配和调度**
任务分配和调度涉及将任务分配给机器人并安排它们的执行顺序。CSP 可以通过以下方式提高机器人的灵活性:
- **考虑任务约束:** CSP 可以将任务之间的依赖关系、资源限制和其他约束建模为约束,从而确保任务分配和调度是可行的。
- **优化调度:** CSP 可以通过考虑多个目标(例如,最小化完成时间、最大化资源利用率)来优化调度,从而提高机器人的效率和性能。
**代码示例:**
```python
import pulp
# 创建一个任务列表
tasks = ['Task A', 'Task B', 'Task C', 'Task D']
# 定义任务之间的依赖关系
dependencies = {
'Task A': [],
'Task B': ['Task A'],
'Task C': ['Task A'],
'Task D': ['Task B', 'Task C']
}
# 定义任务的执行时间
execution_times = {
'Task A': 10,
'Task B': 5,
'Task C': 8,
'Task D': 6
}
# 创建一个线性规划模型
model = pulp.LpProblem('Task Scheduling', pulp.LpMinimize)
# 定义决策变量
start_times = pulp.LpVariable.dicts('start_times', tasks, 0, None, pu
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了约束满足问题 (CSP) 的原理、应用和实战技巧。从基础概念到高级优化算法,再到不同数据库和分布式系统中的约束实现,专栏提供了全面的指南。此外,它还涵盖了 CSP 在人工智能、运筹优化、医疗保健、软件工程、机器学习、自然语言处理和计算机视觉等领域的广泛应用。通过深入的案例研究和专家见解,本专栏旨在帮助读者掌握 CSP 的复杂性,并将其应用于解决实际问题,提升模型性能、优化决策、保障数据完整性和提高代码质量。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Python排序与异常处理】:优雅地处理排序过程中的各种异常情况
# 1. Python排序算法概述
排序算法是计算机科学中的基础概念之一,无论是在学习还是在实际工作中,都是不可或缺的技能。Python作为一门广泛使用的编程语言,内置了多种排序机制,这些机制在不同的应用场景中发挥着关键作用。本章将为读者提供一个Python排序算法的概览,包括Python内置排序函数的基本使用、排序算法的复杂度分析,以及高级排序技术的探
【Python调试技巧】:使用字符串进行有效的调试
# 1. Python字符串与调试的关系
在开发过程中,Python字符串不仅是数据和信息展示的基本方式,还与代码调试紧密相关。调试通常需要从程序运行中提取有用信息,而字符串是这些信息的主要载体。良好的字符串使用习惯能够帮助开发者快速定位问题所在,优化日志记录,并在异常处理时提供清晰的反馈。这一章将探讨Python字符串与调试之间的关系,并展示如何有效地利用字符串进行代码调试。
# 2. P
Python高级format特性:探索format的嵌套与条件表达式

# 1. Python中的format方法基础
Python的`format`方法是一种功能强大的字符串格式化工具,用于将数据组合成字符串。它是通过在字符串的花括号`{}`内插入变量或表达式,然后调用`format`方法实现数据的格式化。这个方法允许开发者在生成最终输出时,对数据的表现形式进行高度的控制。例如:
```python
Python测试驱动开发(TDD)实战指南:编写健壮代码的艺术
# 1. 测试驱动开发(TDD)简介
测试驱动开发(TDD)是一种软件开发实践,它指导开发人员首先编写失败的测试用例,然后编写代码使其通过,最后进行重构以提高代码质量。TDD的核心是反复进行非常短的开发周期,称为“红绿重构”循环。在这一过程中,"红"代表测试失败,"绿"代表测试通过,而"重构"则是在测试通过后,提升代码质量和设计的阶段。TDD能有效确保软件质量,促进设计的清晰度,以及提高开发效率。尽管它增加了开发初期的工作量,但长远来
Python字符串编码解码:Unicode到UTF-8的转换规则全解析
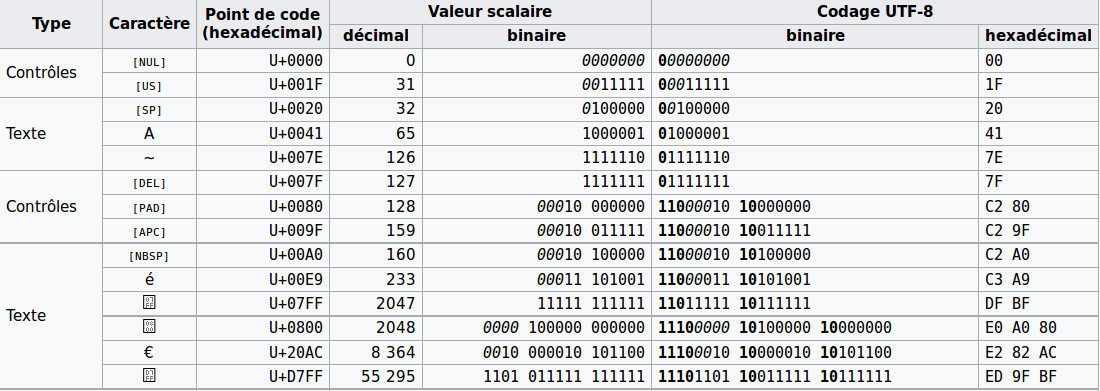
# 1. 字符串编码基础与历史回顾
## 1.1 早期字符编码的挑战
在计算机发展的初期阶段,字符编码并不统一,这造成了很多兼容性问题。由于不同的计算机制造商使用各自的编码表,导致了数据交换的困难。例如,早期的ASCII编码只包含128个字符,这对于表示各种语言文字是远远不够的。
## 1.2 字符编码的演进
随着全球化的推进,需要一个统一的字符集来支持
【Python函数探索】:map()函数在字符串转列表中的应用
# 1. Python函数基础与map()函数概述
## 1.1 Python函数基础
Python中的函数是一段可以重复使用的代码块,用于执行特定的任务。函数可以接收输入(参数),进行处
Python在语音识别中的应用:构建能听懂人类的AI系统的终极指南

# 1. 语音识别与Python概述
在当今飞速发展的信息技术时代,语音识别技术的应用范围越来越广,它已经成为人工智能领域里一个重要的研究方向。Python作为一门广泛应用于数据科学和机器学习的编程语言,因其简洁的语法和强大的库支持,在语音识别系统开发中扮演了重要角色。本章将对语音识别的概念进行简要介绍,并探讨Python在语音识别中的应用和优势。
语音识别技术本质上是计算机系统通过算法将人类的语音信号转换
【Python正则表达式高级课】:搜索技巧与find()的完美结合

# 1. 正则表达式的基础知识和应用
## 1.1 什么是正则表达式
正则表达式,通常简称为 regex 或 regexp,是一种强大的文本处理工具,用于在字符串中执行搜索、匹配和替换操作。正则表达式由一系列字符组成,这些字符定义了一种搜索模式,使得你可以检查一个字符串是否符合特定的条件,或者将字符串中的符
【Python格式化与正则表达式的结合】:数据验证的高效组合技术
# 1. Python数据验证概述
Python作为一门广泛应用于数据处理与分析的编程语言,其数据验证能力是确保数据质量和完整性的重要工具。数据验证通常包括检查数据的类型、格式、范围、有效性等,确保数据符合预期规范。在本章中,我们将简要介绍数据验证的概念、重要性以及在Python中的基础应用,为读者后续深入学习数据验证的高级技巧和最佳实践打下坚实的基础。接下
【避免字符串分割陷阱】:split常见错误及解决方案
# 1. 字符串分割基础
## 1.1 字符串分割的定义与重要性
字符串分割是编程中常见的一项基础操作,涉及到从一段文本中提取信息的需要。此操作允许开发者将字符串拆分成更小、更易于管理和解析的部分,例如,从日志文件中提取特定信息或解析由逗号分隔的数据。掌握字符串分割的基础知识,对于数据处理和文本分析至关重要。
## 1.2 分割操作的典型方法
在处理字符串分割任务时,一些常
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )