【系统集成的秘密】:发那科机器人无缝融合EtherNet-IP网络的策略
发布时间: 2025-01-10 11:17:09 阅读量: 5 订阅数: 4 

发那科机器人 EtherNet-IP 设置手册
# 摘要
本文系统性地探讨了发那科机器人与EtherNet-IP网络的集成,从基础理论到实际应用,再到高级技术与未来展望,全面覆盖了网络集成的关键要素。首先介绍了系统集成与EtherNet-IP网络的基础知识,接着深入探讨了发那科机器人的通讯协议和网络协议,分析了机器人与网络之间的交互流程。第三章讨论了机器人系统集成的具体策略,包括网络配置、关键技术和实际应用案例。第四章着重讲解了自定义通讯协议的开发、高级诊断与故障处理,并对未来发展趋势进行了展望。最后,第五章提供了网络集成实践指南,详述了实战演练和经验分享,旨在帮助技术人员高效地集成发那科机器人到复杂工业网络中。
# 关键字
系统集成;EtherNet-IP网络;发那科机器人;通讯协议;网络诊断;工业物联网IIoT
参考资源链接:[发那科机器人 EtherNet/IP 通讯配置指南](https://wenku.csdn.net/doc/3pnb3qro6f?spm=1055.2635.3001.10343)
# 1. 系统集成与EtherNet-IP网络基础
## EtherNet/IP 简介
EtherNet/IP 是一种基于标准以太网的工业通信协议,它允许制造设备如传感器、执行器和机器人等进行高速、实时的数据交换。EtherNet/IP 是工业自动化中的关键组成部分,广泛应用于制造业中的控制系统和设备通讯。
## 系统集成的重要性
系统集成是将不同的软件、硬件组件和通信技术结合成一个统一、高效、协同工作的整体。有效的系统集成对于实现设备间的流畅通讯和数据共享至关重要,为企业的自动化和信息化提供基础支撑。
##EtherNet-IP在网络集成中的角色
在系统集成的过程中,EtherNet-IP作为一种有效的网络协议,确保了数据传输的高效性和可靠性。通过支持多种数据传输方式,包括周期性和非周期性数据交换,EtherNet-IP网络可以满足机器人集成中的不同需求,保障实时控制和监督。
本章将讨论EtherNet-IP网络在系统集成中的应用基础,为后续深入了解发那科机器人通讯协议提供必要的网络基础概念。
# 2. 发那科机器人通讯协议概述
### 2.1 发那科机器人的通信架构
在自动化工业领域,发那科机器人被广泛应用于生产线上执行高精度的任务。其通信架构是保证机器人能高效、稳定工作的关键。
#### 2.1.1 通讯协议的种类和选择
发那科机器人支持多种通讯协议,包括但不限于RS-232、RS-485、Profibus、DeviceNet和EtherNet/IP。选择合适的通讯协议需考虑以下因素:
- **硬件兼容性**:确保机器人控制器和其它设备支持所选协议。
- **性能需求**:确定系统的实时性、数据吞吐量要求。
- **网络规模**:评估网络的大小和扩展性需求。
- **易用性**:开发和维护的便捷性。
基于这些因素,工业中越来越倾向于使用基于以太网的EtherNet/IP,因为它提供了高性能、易于扩展和集成的特性。
#### 2.1.2 通讯协议在机器人系统中的作用
通讯协议在机器人系统中扮演着至关重要的角色。它保证了:
- **数据的准确性**:通过协议提供的通信机制确保数据无误地传输。
- **实时性**:响应时间是机器人性能的关键指标之一,协议需要满足严格的时间要求。
- **系统的稳定性**:通信的可靠性直接关系到整个生产线的稳定运行。
### 2.2 EtherNet-IP网络协议详解
EtherNet/IP是一种工业通讯协议,它基于标准以太网,加入了工业自动化领域的特定功能。
#### 2.2.1 EtherNet-IP网络的特点和优势
EtherNet/IP网络的特点和优势包括:
- **基于标准TCP/IP**:易于集成和维护。
- **高效的生产者/消费者模型**:使得数据传输更加直接和高效。
- **广泛的应用支持**:与许多工业设备和软件兼容。
- **强大的诊断能力**:提供了丰富的诊断工具以快速定位问题。
#### 2.2.2 EtherNet-IP的数据封装和传输机制
在数据封装方面,EtherNet/IP使用了标准的以太网帧结构,并在其中加入了CIP(Common Industrial Protocol)协议用于封装工业数据。CIP封装通过所谓的"包装器"来传输数据,它定义了设备间的通信方式,包括数据的读取、写入和状态更新。
数据传输机制基于生产者-消费者模式,该模式下,"生产者"设备负责发送数据,"消费者"设备则接收数据。这种模式简化了数据流的管理,并且提高了效率。
### 2.3 发那科机器人与EtherNet-IP的交互流程
与EtherNet-IP的交互流程是发那科机器人进行网络通讯的基础。
#### 2.3.1 消息类型和数据交换模式
在EtherNet-IP网络中,发那科机器人可以使用多种消息类型进行数据交换,包括周期性、事件触发或请求响应类型。这些消息类型允许机器人与其他系统设备根据实际需求高效地交换数据。
数据交换模式通常基于CIP协议,它定义了通信对等方之间的交互方式。模式包括控制模式、信息模式和配置模式,分别用于操作、获取信息和系统配置。
#### 2.3.2 实时通讯机制和同步问题
实时通讯是保证机器人同步动作的关键。在EtherNet-IP网络中,利用以太网的MAC层优先级和CIP协议的同步机制,可以实现精确的实时通讯。
同步问题通常通过网络中加入时间同步协议(例如IEEE 1588 Precision Time Protocol, PTP)来解决。这样可以确保所有设备在微秒级别内同步,进而保证机器人与其他设备动作的精确协调。
在本章中,我们深入探讨了发那科机器人的通信架构以及在这一架构下, EtherNet-IP协议的应用和实现。通过理解这些通讯协议的种类、特点以及它们在机器人系统中的作用,可以更好地设计和优化整个工业自动化网络。接下来章节将详细介绍发那科机器人系统集成的策略与实际应用案例。
# 3. ```
# 第三章:发那科机器人系统集成策略
发那科机器人系统的集成是一个复杂的过程,涉及精确的硬件配置、软件同步以及性能优化。本章节将深入探讨如何有效地集成发那科机器人到现有的工业自动化系统中,确保系统运行的高效性和稳定性。
## 3.1 网络配置与集成步骤
### 3.1.1 硬件连接和网络参数设置
在开始集成之前,必须保证硬件连接正确无误。这包括了网络连接(如以太网、光纤或无线连接),以及与机器人的各种传感器和执行器的物理接口。对于网络参数,需要设置静态IP地址、子网掩码、网关以及DNS服务器。这些设置保证了机器人可以稳定地接入企业内部网络,并与其他系统组件进行通信。
```markdown
| 参数 | 作用 | 示例设置 |
|------------|-------------------------------------------------|------------------------|
| IP地址 | 网络中设备的唯一标识 | 192.168.1.100 |
| 子网掩码 | 确定网络的大小和设备的网络范围 | 255.255.255.0 |
| 默认

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《发那科机器人 EtherNet-IP 设置手册》专栏深入探讨了发那科机器人与 EtherNet-IP 网络集成的各个方面。从基础设置到故障排除,再到系统集成和性能监控,本专栏提供了全面的指导。它涵盖了以下主题:
* EtherNet-IP 基础设置指南
* 发那科机器人与 EtherNet-IP 集成详解
* EtherNet-IP 通讯故障排查技巧
* 发那科机器人与 EtherNet-IP 网络无缝融合策略
* EtherNet-IP 在自动化生产线中的实际应用
* EtherNet-IP 系统的升级和维护指南
* EtherNet-IP 网络状态和性能的实时监控
* 发那科机器人与 EtherNet-IP 网络之间的数据同步解决方案
本专栏旨在帮助读者充分利用发那科机器人与 EtherNet-IP 网络的集成,从而提高自动化生产线的效率、可靠性和性能。
专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【C++编程技巧】:快速判断点是否在多边形内部的5大方法
# 摘要
多边形内部点检测是计算机图形学和计算几何中的一个基础问题。本文首先回顾了相关的几何学基础,介绍了多边形内部点检测算法的基本概念和分类,并对算法效率及适用场景进行了分析。随后,详细阐述了五种实现多边形内部点检测的方法,并分别讨论了各自的算法描述、步骤和实践中的注意事项。文章进一步比较了这些算法的性能,并提出了
【TCU标定进阶秘籍】:揭秘自动变速箱控制策略的精髓
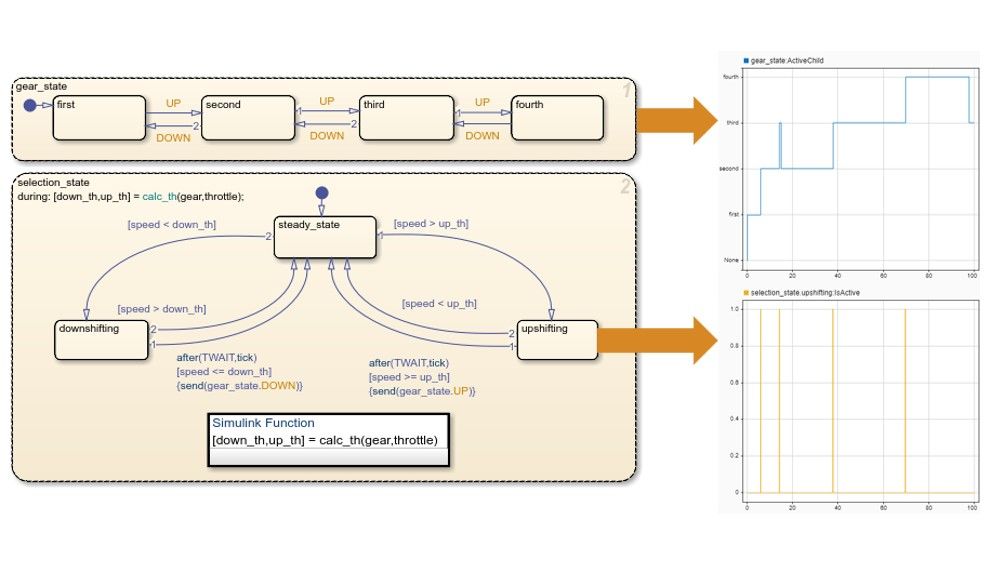
# 摘要
本文综述了自动变速箱控制策略的发展与现状,重点介绍了传动控制单元(TCU)的标定基础理论、工具与方法,以及实际标定案例的分析
数字信号处理升级指南:MV方法的优势与挑战(紧迫型+专业性)

# 摘要
数字信号处理(DSP)是电子工程中的核心领域,而移动平均(MV)方法是DSP中广泛使用的一种技术,用于信号去噪、平滑以及趋势预测。本文从移动平均方法的基本原理出发,详细阐述了简单移动平均(SMA)、加权移动平均(WMA)和指数移动平均(EMA)等不同类型的特点和数学模型。同时,本研究还探
3GPP TS 38.104全解析:5G NR物理层的终极指南
%20(GSM)%20GSM_EDGE%20Layer%201%20General%20Requirements%20(3GPP%20TS%2044.00
SV660P伺服调试手册:从新手到专家的全步骤实践指南

# 摘要
本文详细介绍了SV660P伺服驱动器的安装、配置、调试和高级应用。首先概述了驱动器的基本信息及其重要性,然后逐一阐述了安装前的准备、硬件安装步骤和基本测试。接下来,文章深入探讨了参数配置的重要性、常用参数的设置方法以及参数配置实例。在软件调试部分,本文介绍了调试环境的搭建、功能调试、性能优化以及异常处理和故障诊断。此外,还探索了SV660P在多轴同步控制、网络通讯集成和自适应智能化控制方面的高级应用。最后一章通过具体案例研究,展示了
【新手必看】:掌握这些技巧,轻松入门Medium平台使用
# 摘要
本文全面介绍了Medium这一在线出版平台的使用方法和高级功能,涵盖了从注册流程到内容创作、管理发布、互动社区建设以及数据分析的各个方面。重点探讨了如何通过有效的格式化技巧、标签分类、SEO优化提升内容质量,以及通过互动增加读者参与度和构建个人品牌。此外,文章还详细分析了如何利用Medium的统计工具和功能进行内容策略调整,探索了
揭秘3525逆变器:电力转换的9大核心原理与应用解析

# 摘要
3525逆变器作为电力转换领域的重要设备,具有广泛的应用价值。本文首先概述了3525逆变器的基本原理及其在电力转换、调制技术和保护机制方面的工作原理。随后,文章详细分析了3525逆变器的关键组件,包括电路结构、控制策略和散热设计,并探讨了这些组件在逆变器性能和可靠性方面的影响。在实践应用方面,本文讨论了352
功能分析法案例研究
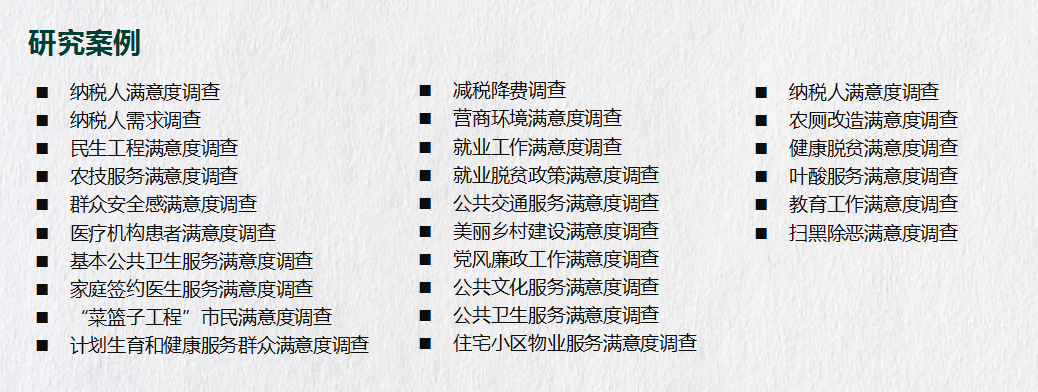
# 摘要
功能分析法是一种系统化的方法论,用于对系统的功能进行详细的研究和优化。本论文首先探讨了功能分析法的理论基础,并概述了其在软件开发和系统工程中的实践技巧。接着,深入研究了功能分析法在软件需求分析、架构设计以及迭代开发中的应用。本文还分析了功能分析法在系统工程中的角色,包括系统设计、优化与维护,并讨论了面向对象的技术和敏捷开发环境下功能分析法的应用。最后,本文探讨了功能分析法的高级主题,包括未来发展和潜在挑战。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )