【AT89C51微控制器编程环境搭建】:从零开始到开发环境完全配置的专家指南
发布时间: 2025-01-06 15:03:50 阅读量: 10 订阅数: 13 

基于springboot+vue的体育馆管理系统的设计与实现(Java毕业设计,附源码,部署教程).zip
# 摘要
本文全面介绍了AT89C51微控制器的基本概念、编程基础以及开发环境搭建。首先概述了微控制器的架构和工作原理,包括CPU结构、寄存器、内存和I/O端口的配置。随后探讨了编程语言的选择、编程工具和开发环境的配置,重点在于Keil uVision IDE的安装和调试工具的使用。文章进一步深入到编程实践,包括基础程序的编写、中断与定时器技术的应用,以及高级项目开发技巧。最后,探讨了微控制器的扩展模块、系统性能与安全性提升,以及未来技术的发展趋势和学习更新的重要性。
# 关键字
AT89C51微控制器;编程基础;开发环境;Keil uVision;系统性能;安全性提升
参考资源链接:[AT89C51单片机详解:特性与应用](https://wenku.csdn.net/doc/6494fc694ce2147568adddd0?spm=1055.2635.3001.10343)
# 1. AT89C51微控制器概述
## 1.1 AT89C51的历史和应用
AT89C51是一款经典的8位微控制器,广泛应用于嵌入式系统、工业控制和消费电子产品中。作为早期的微控制器之一,它开辟了微控制器应用的新纪元。
## 1.2 AT89C51的结构和特性
AT89C51由一个8位CPU、4KB的ROM、128字节的RAM以及2个定时器/计数器组成。这些硬件资源为实现各种功能提供了可能。
## 1.3 为什么选择AT89C51
尽管市场有许多新型号的微控制器,但AT89C51因其实用性、稳定性和开发成本低等优势,仍然是许多工程师的首选。特别是对于教育和学习而言,AT89C51提供了一个低成本且易于理解的平台。
# 2. 微控制器编程基础
### AT89C51的工作原理
AT89C51微控制器是基于经典的8051架构,由Intel公司在1980年代推出。至今,8051架构因其简单、灵活和成本效益而被广泛使用。要深入理解AT89C51,首先需要了解它的核心组成部分,包括CPU、寄存器组、内存和I/O端口等。
#### CPU结构和寄存器
CPU是微控制器的心脏,负责执行指令和处理数据。8051的CPU基于8位架构,包含一个算术逻辑单元(ALU)、一个指令寄存器、一个程序计数器(PC)和一组工作寄存器。
工作寄存器组是8051的重要组成部分,它由32个8位寄存器组成,分为四个寄存器组,每个组有8个寄存器(R0-R7)。每个组都可以通过程序选择使用,这为程序设计提供了极大的灵活性。
```assembly
; 示例:使用寄存器R0和R1存储数据
MOV A, #20h ; 将立即数20h加载到累加器A
MOV R0, A ; 将累加器A的值转移到寄存器R0
MOV R1, #30h ; 将立即数30h加载到寄存器R1
ADD A, R1 ; 将寄存器R1的值加到累加器A
```
在上面的汇编代码片段中,累加器A首先被初始化为20h,然后将这个值复制到寄存器R0。之后,R1被赋予了30h的值,最后将累加器A的值和R1的值相加,并将结果保留在累加器A中。
#### 内存和I/O端口的配置
AT89C51提供了一个结构化的内存和I/O端口的配置方案。内部RAM被分为两个主要区域:直接可寻址区域和间接可寻址区域。直接寻址区域允许程序直接访问特定地址内的数据,而间接寻址则使用寄存器作为指针来访问内存。
I/O端口在8051微控制器中也非常重要。AT89C51具有四个I/O端口,分别标记为P0, P1, P2和P3。这些端口不仅用于数据输入输出,还可以通过设置特定的位来进行控制。
```c
// 示例:C语言中访问I/O端口
#include <REGX51.H>
void main() {
P1 = 0xFF; // 将P1端口的所有位设置为高电平
P2 = 0x55; // 将P2端口的位设置为交替的高低电平模式
// 其他I/O操作...
}
```
在上述C语言示例中,我们对P1端口和P2端口进行了操作。P1端口的所有位被设置为高电平,而P2端口的位则被设置为交替的高低电平模式。这些操作在嵌入式系统中用于控制外设、读取传感器数据等。
### 编程语言的选择
#### 汇编语言和C语言的比较
在开发AT89C51微控制器时,可选择多种编程语言,其中最常见的两种语言是汇编语言和C语言。
汇编语言是最底层的编程语言,与微控制器的机器指令直接相关。使用汇编语言编写的程序能够直接控制硬件资源,因此它的执行效率非常高,尤其适合对性能要求极高的应用。
C语言,作为一种高级语言,提供更好的可读性和易于维护的代码结构。它也支持对硬件资源的控制,虽然不如汇编语言那么直接。使用C语言编写的程序比汇编语言编写的程序更易于移植和维护。
```c
// 示例:C语言中的for循环
#include <REGX51.H>
void main() {
int i;
for (i = 0; i < 100; i++) {
P1 = ~P1; // 闪烁LED灯(假设P1端口连接LED)
}
}
```
在上面的C语言代码中,我们使用了一个for循环,它使得连接到P1端口的LED灯闪烁100次。这段代码的可读性和易用性高于直接使用汇编语言。
#### 开发语言对性能和易用性的影响
使用不同的编程语言将直接影响开发效率、程序性能和代码的可维护性。汇编语言编写的程序执行速度更快,但编写和调试过程更为繁琐,且不利于代码的长期维护。
C语言虽然在性能上略逊于汇编语言,但在开发效率和代码可维护性方面有很大的优势。为了兼顾性能和开发效率,现代嵌入式开发中,经常采用C语言与部分汇编语言的混合编程策略。
### 编程工具和开发环境
#### 交叉编译器的安装和配置
编写程序后,需要将其编译成微控制器可以执行的机器码。这个过程需要使用交叉编译器,它是一种针对特定目标架构(在本例中为AT89C51)而非开发计算机本身的编译器。
交叉编译器通常与集成开发环境(IDE)配套使用,如Keil uVision、SDCC(Small Device C Compiler)等。交叉编译器的安装和配置是程序开发的第一步,确保了后续开发过程中编译环境的一致性和稳定性。
```bash
# 示例:在Linux下安装SDCC交叉编译器
sudo apt-get install sdcc
```
在Linux系统中,使用包管理器可以轻松安装SDCC交叉编译器。在Windows系统中,通常是通过安装程序进行安装,并设置环境变量,以便在任何命令行窗口中使用交叉编译器。
#### 模拟器和调试工具的介绍
为了在硬件开发之前测试代码,模拟器和调试工具是必不可少的。模拟器允许开发者在没有实际硬件的情况下运行程序,并检查程序的执行流程和可能的错误。
调试工具,如JTAG和串行调试,提供了与微控制器通信的途径,开发者可以通过这些工具查看内存内容、寄存器状态以及实时追踪程序执行流程。
```mermaid
graph TD
A[编写源代码] --> B[编译成机器码]
B --> C[使用模拟器测试]
B --> D[下载到目标硬件]
C --> E[调试分析]
D --> E[调试分析]
E --> F[性能优化]
```
在上述流程图中,描绘了从编写源代码到进行性能优化的完整开发流程。在这个过程中,模拟器和调试工具的使用是不可或缺的环节,它们帮助开发者发现和解决问题。
在这一章中,我们介绍了AT89C51微控制器的工作原理、编程语言的选择,以及编程工具和开发环境的安装和配置。这些基础知识是进行微控制器开发的基础,也是为后续深入学习和实践提供了必要的背景信息。在下一章中,我们将深入实践,学习如何搭建开发环境,以及如何开始实际编程和应用开发。
# 3. 开发环境搭建实战
## 3.1 安装和配置Keil uVision IDE
### 3.1.1 Keil uVision的安装步骤
Keil uVision IDE是一款功能强大的集成开发环境,专为8051微控制器家族设计,它的用户界面直观,并提供了丰富的开发和调试工具。为了能够在AT89C51微控制器上编程和调试,首先需要安装Keil uVision IDE。
安装步骤如下:
1. 访问Keil官方网站下载最新版的Keil uVision IDE。
2. 下载对应操作系统的安装包,并启动安装程序。
3. 按照安装向导的提示选择安装路径,然后点击“Next”继续。
4. 接下来,选择“Complete”以安装所有可用组件,或者选择“Custom”自定义组件安装。建议选择“Complete”安装,以确保所有必要的开发工具都被安装。
5. 在许可协议页面上,接受许可协议,然后点击“Next”。
6. 安装向导会自动开始复制文件到你的电脑,等待安装完成。
7. 安装完成后,选择“Finish”退出安装向导。
8. 启动Keil uVision,可以按照提示完成初始配置,比如设置工作目录。
安装完成后,Keil uVision IDE的界面将包含多个窗口,诸如项目管理窗口、代码编辑窗口、输出

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【机器学习精确度提升指南】:数据预处理的7大技巧揭秘
# 摘要
数据预处理是数据挖掘和机器学习中的关键步骤,它直接影响着最终模型的性能和准确性。本文首先阐述了数据预处理的重要性,随后介绍了数据清洗中的缺失值和异常值处理技巧,以及数据归一化的实际应用技术。接着,文章详细探讨了特征工程中的特征选择、构造和维度规约技巧,并提出了有效的数据增强策略,包括数据重采样、数据变换和数据集成。最后,本文通过实践案例展示了数据预处理的流程和效果评估,证明了预处理对于提升模型精确度的重要作用。通过全面的讨论和实例分析,本文旨在为读者提供一个系统性的数据预处理指南。
# 关键字
数据预处理;数据清洗;特征工程;数据增强;模型精确度;归一化技术
参考资源链接:[国科
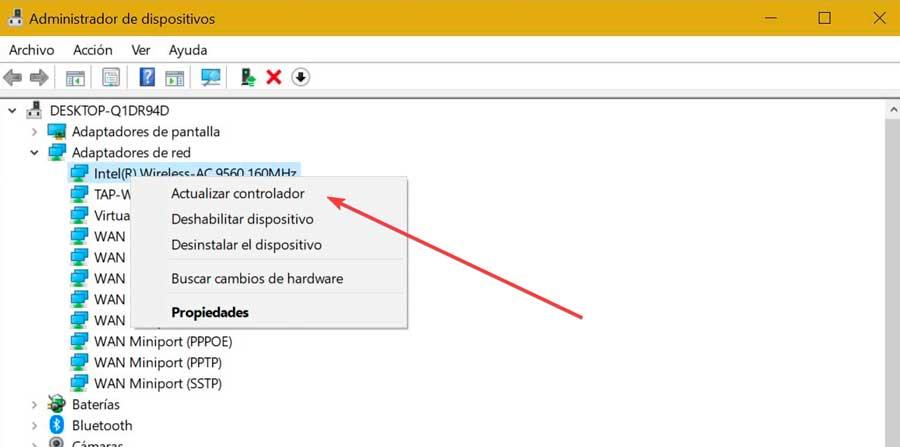
江森自控软件操作宝典:10分钟快速掌握界面导航与系统设置

# 摘要
本文综述了江森自控软件的核心功能及其使用实践,涵盖了用户界面导航、系统设置、故障诊断和系统维护等方面。首先,介绍了界面导航的基础理论与实践,包括界面组成、快速定位和常用操作。接着,探讨了系统设置的重要性、高级定制技巧和备份恢复策略。随后,深入分析了故障诊断的流程、系统维护的最佳实践以及提升系统稳定性的策略。最后,通过案例研究和实战演练,为特定行业提供解决方案,并在模拟操作环境中进行演练任务,以巩固知识和提升技能。本文旨在为用户提供一
DCMI v1.5升级手册:全面解析数据中心的下一代管理技术
# 摘要
本文全面介绍DCMI v1.5标准的核心特性及其新特性,探讨了管理标准的更新、管理界面与API的优化,以及高级监控与报告功能的增强。文章还提供了详细的DCMI v1.5部署与迁移指南,包括系统需求、兼容性分析、部署策略、步骤和常见问题的解决方案。通过对最佳实践案例研究的深入分析,本文展示了DCMI v1.5在混合云环境中的应用优化、自动化工作流的实现以及安全性增强与合规性。最后,文章讨论了性能调优与故障排除的策略,并对DCMI技术的未来展望进行了预测,特别是云计算、AI与机器学习技术的融合以及行业案例与战略规划。
# 关键字
DCMI v1.5;数据中心管理;监控与报告;部署与迁移
系统辨识核心概念解析:理论到应用的无缝转换秘籍
# 摘要
系统辨识是控制工程中的一项基础且核心的技术,它涉及到建立数学模型来描述实际系统的行为。本文系统地介绍了系统辨识的理论框架、数学模型与算法,以及实验设计和数据采集方法。通过探讨参数估计的多种方法,如最小二乘法、极大似然估计等,本文深入分析了模型验证与选择的标
【免费小说应用市场揭秘】:番茄小说的用户数据驱动增长策略

# 摘要
随着移动互联网的快速发展,免费小说应用市场逐渐壮大,吸引了大量用户。本文首先概述了免费小说应用市场的现状,随后深入分析了用户数据在产品优化和用户增长策略中的重要性,探讨了用户数据收集、处理、整合和行为分析的方法和工具。紧接着,文章详细描述了番茄小说的增长策略实践,包括改进内容推荐算法、定制个性化阅读体验以及利用增长黑客技术。此外,本文探讨了大
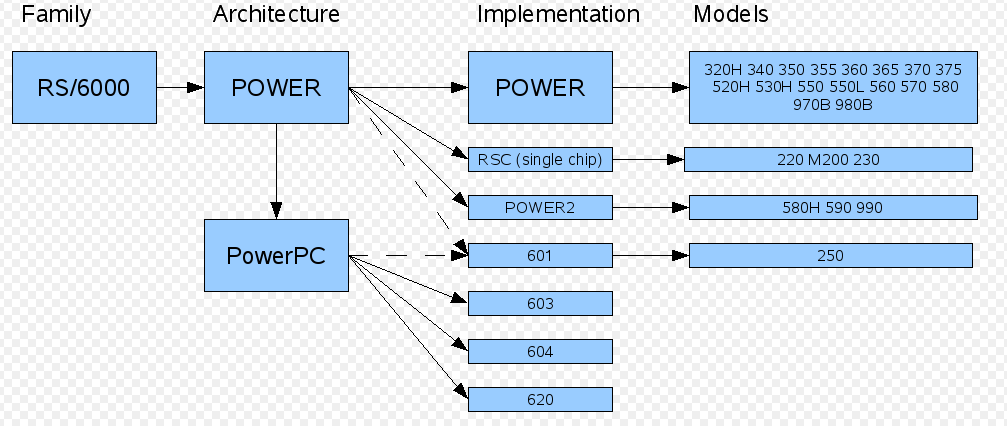
多核PowerPC性能调优:vxWorks案例研究详解
# 摘要
多核处理器架构的性能调优是一个复杂的过程,涉及硬件平台特性、操作系统支持、资源分配策略以及软件开发等多个方面。vxWorks作为一款实时操作系统,其在多核PowerPC平台上的应用要求开发者深入了解其系统架构和性能调优工具。本文首先探讨了多核处理器的基础知识和vxWorks操作系统的特点,进而分析了性能调优的基本原则、并发和同步问题以及资源分配策略。在实践部分,本文提供了vxW
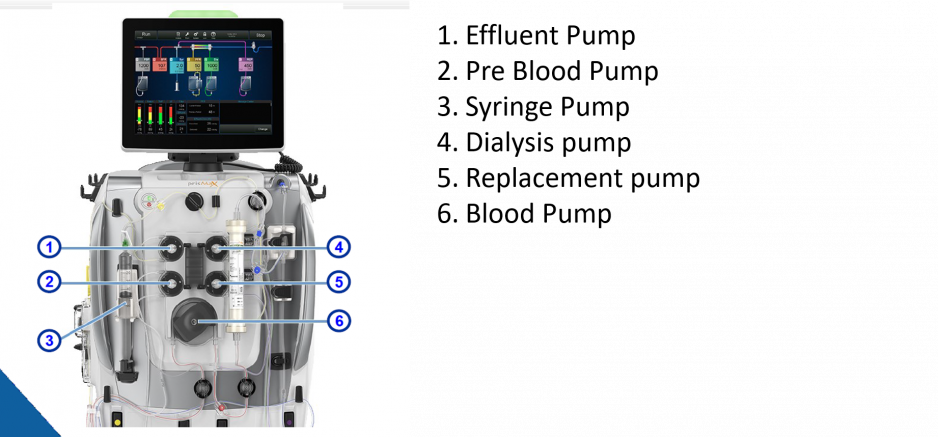
费森尤斯4008 S透析机:维护与升级,保持设备巅峰性能
# 摘要
本文全面介绍了费森尤斯4008 S透析机的维护与优化策略。首先概述了透析机的基础结构和功能,紧接着详细探讨了基础维护的重要性,包括日常清洁消毒流程、常规检查程序、以及紧急情况下的快速处理方法。文中进一步阐述了硬件升级的路径,包括升级的必要性、过程中的考量以及案例分析。软件优化章节强调了软件更新的重要性、操作界面的改进和远程监控系统
【兼容性大师】HP45打印机兼容性问题解决指南:应对非官方耗材
# 摘要
本文详细探讨了HP45打印机的基础知识、工作原理以及兼容性挑战。首先,介绍HP45打印机的基本结构和工作流程,然后深入分析官方耗材的认证过程与非官方耗材兼容性问题。文章通过兼容性测试的理论依据,评估打印品质与硬件软件的兼容性,并提供了实践中改进兼容性的方法。同时,通过用户反馈的案例分析,探讨了非官方耗材使用中的问题解决方法和先进用户的使用心得。最后,展望了兼容性问题的技术发展趋势以及未来生
SAP CO配置点案例研究:揭示最佳实践背后的秘密

# 摘要
本文提供了对SAP CO配置点的全面概览,包括其定义、功能、在SAP CO模块中的应用以及配置流程。通过案例分析,文章深入探讨了配置点在实际业务中的应用,展示了如何在成本中心和内部订单配置中有效运用,并提出了高级应用方案。本文还讨论了性能优化的策略、问题诊断与解决方法,以及SAP S/4HANA及云环境下配置点的发展趋势。项目实施经验的分享和最佳实践
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )