STM32 HAL库定时器应用宝典:精确控制时序的不二法门
发布时间: 2024-12-17 06:12:08 阅读量: 2 订阅数: 2 

STM32CUBEMX HAL定时器触发ADC采集DMA传输
参考资源链接:[STM32 HAL库入门指南与驱动说明](https://wenku.csdn.net/doc/6412b740be7fbd1778d49a1a?spm=1055.2635.3001.10343)
# 1. STM32 HAL库定时器概述
## 1.1 定时器的定义与作用
STM32微控制器系列广泛应用于嵌入式系统中,其中的硬件定时器是重要的功能模块之一。定时器可以用于时间的精确测量、事件的发生调度以及脉冲的产生等多种场景。通过使用STM32 HAL库(硬件抽象层库),开发者可以更加简单、高效地管理和控制定时器,实现各种定时、计数及PWM等复杂功能。
## 1.2 STM32 HAL库的优势
HAL库是ST官方提供的硬件驱动库,其设计目的在于简化硬件编程并提高代码的可移植性。使用HAL库编程,开发者可以不必深入理解底层硬件细节,通过抽象的函数接口即可完成定时器的配置和操作。这种高级抽象为快速开发提供了便利,并且使得代码在不同STM32设备间移植变得更为容易。
## 1.3 定时器在系统中的重要性
在现代的嵌入式应用中,定时器的精确度和可靠性对整个系统至关重要。例如,实时操作系统的任务调度依赖于定时器来触发上下文切换,而通信协议的实现也常常依赖于定时器来维持精确的时序。因此,定时器的高效使用是提升系统性能和稳定性的关键因素之一。在接下来的章节中,我们将深入探讨STM32 HAL库定时器的具体操作和高级应用。
# 2. 定时器基础操作详解
## 2.1 定时器的初始化与配置
### 2.1.1 定时器基本参数设置
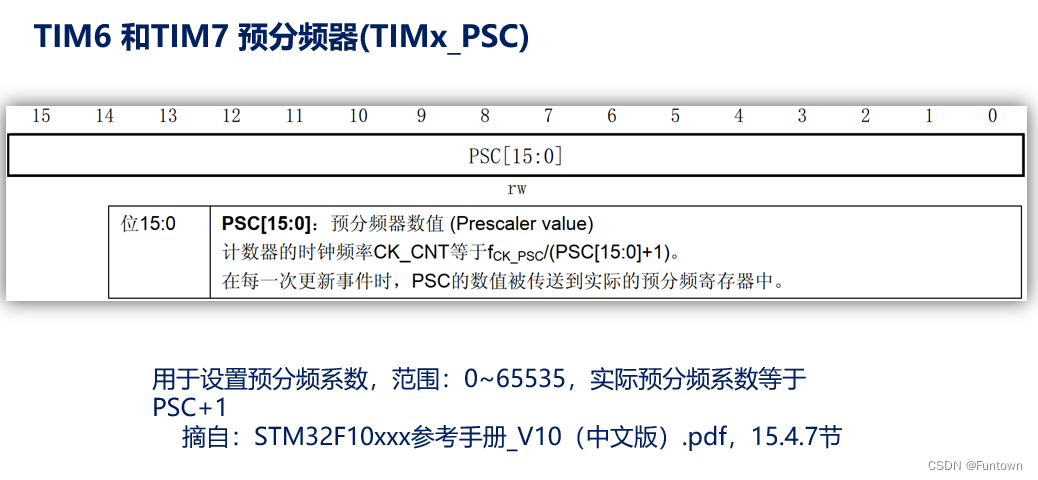
在使用STM32 HAL库进行定时器的初始化与配置时,第一步是设置定时器的基本参数。这包括预分频器(Prescaler)、自动重装载寄存器(Auto-reload register)以及计数模式等。
例如,若要配置TIM2以产生10kHz的定时器中断,首先需要知道主时钟(PCLK1)的频率,假设为72MHz,那么预分频器应设置为7199,因为 `(72MHz / (7199 + 1)) = 10kHz`。接下来,设定自动重装载寄存器为9999,这样定时器溢出后就会产生中断,周期为 `(1 / 10kHz) * (1 + 9999) = 1s`。
```c
/* TIM2 initialization code snippet */
TIM_HandleTypeDef htim2;
uint32_t prescaler = (uint32_t)((SystemCoreClock / 2) / 10000) - 1; // Set prescaler for 10kHz
uint32_t period = (uint32_t)((10kHz) * 1) - 1; // Set auto-reload for 1 second
htim2.Instance = TIM2;
htim2.Init.Prescaler = prescaler;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = period;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&htim2);
```
### 2.1.2 定时器中断配置与应用
配置完基本参数后,下一步是设置定时器的中断,以便在特定时刻执行用户代码。在STM32 HAL库中,这需要开启中断,并在NVIC(Nested Vectored Interrupt Controller)中配置优先级。
```c
/* Enable TIM2 interrupts */
HAL_NVIC_SetPriority(TIM2_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(TIM2_IRQn);
/* TIM2 interrupt handler */
void TIM2_IRQHandler(void) {
HAL_TIM_IRQHandler(&htim2);
}
/* TIM2 interrupt callback */
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if (htim->Instance == TIM2) {
// User code for 1 second interrupt handling
}
}
```
通过这些设置,每秒定时器中断将被触发一次,并在中断服务例程中执行相应的回调函数。
## 2.2 定时器的启动与停止
### 2.2.1 定时器启动方法
一旦定时器初始化和中断配置完成,可以通过HAL库函数启动定时器。主要的函数是`HAL_TIM_Base_Start_IT`用于启动定时器中断,`HAL_TIM_Base_Start`用于启动定时器计数但不产生中断。
```c
/* Start the TIM2 timer in interrupt mode */
HAL_TIM_Base_Start_IT(&htim2);
/* Start the TIM2 timer in normal mode */
HAL_TIM_Base_Start(&htim2);
```
### 2.2.2 定时器停止与重置
在某些情况下,可能需要停止定时器或者重置定时器的计数值。停止定时器可以使用`HAL_TIM_Base_Stop_IT`或`HAL_TIM_Base_Stop`函数,而重置计数器的值则通过`__HAL_TIM_SET_COUNTER`宏。
```c
/* Stop the TIM2 timer */
HAL_TIM_Base_Stop_IT(&htim2);
HAL_TIM_Base_Stop(&htim2);
/* Reset the counter value */
__HAL_TIM_SET_COUNTER(&htim2, 0);
```
## 2.3 定时器的回调函数与事件处理
### 2.3.1 回调函数的实现与注意事项
回调函数是实现定时器事件处理的一种机制,它允许用户在定时器的特定事件(如定时器溢出、匹配比较等)发生时执行自定义代码。实现回调函数时,需要确保它的执行效率要高,避免在其中执行长时间操作,以免影响定时器事件的实时性。
### 2.3.2 定时器事件与状态监控
对于定时器的事件与状态监控,STM32 HAL库提供了状态机的机制来监控定时器的操作状态,确保应用层可以根据状态机提供的信息做出相应的处理。
```c
/* Check the timer status */
if (__HAL_TIM_GET_FLAG(&htim2, TIM_FLAG_UPDATE) != RESET) {
if (__HAL_TIM_GET_IT_SOURCE(&htim2, TIM_IT_UPDATE) != RESET) {
__HAL_TIM_CLEAR_IT(&htim2, TIM_IT_UPDATE);
// User code to handle the timer update event
}
}
```
通过这样的检查和处理机制,可以确保定时器的事件被正确处理,同时防止因为未处理的中断导致的系统异常。
下一章节将继续深入到定时器的高级特性应用,比如输入捕获、输出比较以及PWM输出控制等。
# 3. 定时器高级特性应用
### 3.1 定时器的输入捕获功能
在现代微控制器应用中,定时器不仅仅是用于计时或延时,其输入捕获功能能够在外部事件发生时记录时间信息,对于精确测量外部脉冲宽度、频率、周期等参数至关重要。输入捕获功能允许定时器在检测到输入信号边沿(上升沿或下降沿)时捕获当前的计数值,这样就可以直接读取到输入信号的相关时间信息。
#### 3.1.1 输入捕获的原理与应用
输入捕获功能利用的是定时器的输入捕获通道。当配置定时器的输入捕获通道与外部引脚相连后,定时器便能够感应到输入信号的上升沿或下降沿,并自动捕获当前的计数值至捕获寄存器中。通过读取这个值,可以获取到外部事件发生的具体时刻。此外,还可以配置捕获通道以触发中断或DMA传输,以实现更高性能的数据处理。
一个典型的输入捕获应用场景是在编码器的信号读取上。编码器输出的脉冲信号,通过输入捕获能够准确计算出旋转的速度和方向,从而实现精确的速度控制和位置反馈。
#### 3.1.2 输入捕获的配置与示例
配置STM32定时器以使用输入捕获功能,首先需要初始化定时器,并设置对应的输入捕获通道。下面给出一个简单的示例代码块,展示如何进行输入捕获的配置:
```c
/* 定时器句柄声明 */
TIM_Hand
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
BMS通讯协议V2.07全解析:电池管理系统通信技术的终极指南(权威揭秘)
(1).jpg)
参考资源链接:[沃特玛BMS通讯协议V2.07详解](https://wenku.csdn.net/doc/oofsi3m9yc?spm=1055.2635.3001.10343)
# 1. BMS通讯协议V2.07概述
## 1.1 BMS通讯协议简介
电池管理系统(Battery Management System, BMS)通讯协议V2.07是一套用于电池单元与管理单元之间交换数据的标准协议。它的主要作用是确保电池系统的健康状态监控、充放电控制和信息
【Prime Time工作流程优化】:自动化与个性化设置的终极指南

参考资源链接:[Synopsys Prime Time中文教程:静态时序分析与形式验证详解](https://wenku.csdn.net/doc/6492b5a89aecc961cb2885db?spm=1055.2635.3001.10343)
# 1. Prime Time工作流程优化概述
在信息技术日新月异的今天,工作流程优化已成为提高企业竞争力的关键要素。随着技术的不断发展,Prime Time公
【计价软件故障快速解决】:常见问题及应对技巧
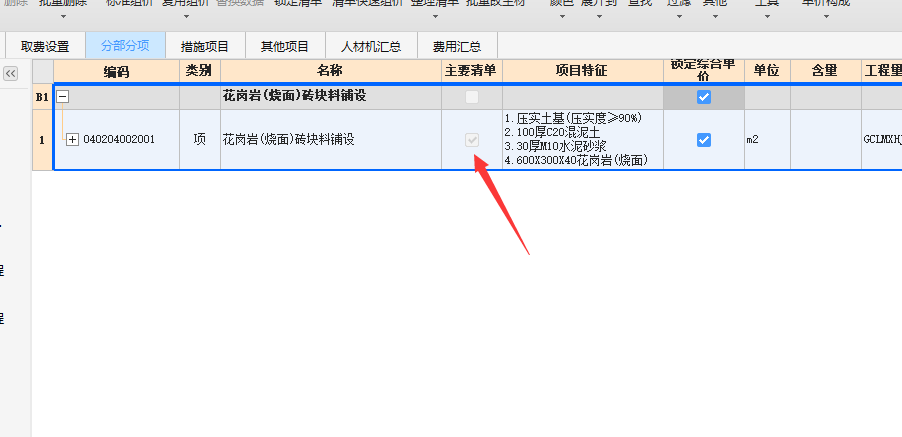
参考资源链接:[新点计价软件操作指南:量价费与子目工程量调整](https://wenku.csdn.net/doc/61bffjnss9?spm=1055.2635.3001.10343)
# 1. 计价软件故障快速解决概览
在现代商业环境中,计价软件是企业运营不可或缺的一部分,为准确的财务计算提供了技术支持。然而,由于软件系统的复杂性和不断变化的操作需求,故障在所难免。快速解决这些故障不仅能降低公司的损失,还能提
FANUC机械臂编程与应用:自动化解决方案的全面指南

参考资源链接:[FANUC机器人操作与安全手册:编程与维修指南](https://wenku.csdn.net/doc/645ef067543f844488899ce4?spm=1055.2635.3001.10343)
# 1. FANUC机械臂概述及其在自动化中的角色
## 1.1 机械臂技术的起源与发展
工业机械臂技术自20世纪中叶起源于汽车制造业,最初用于简化重复性高、劳动强度大的任务。如今,随着技术的进步,机械臂已经成为自动
【指针进阶技巧】:C语言高效内存管理,让你的程序运行如飞
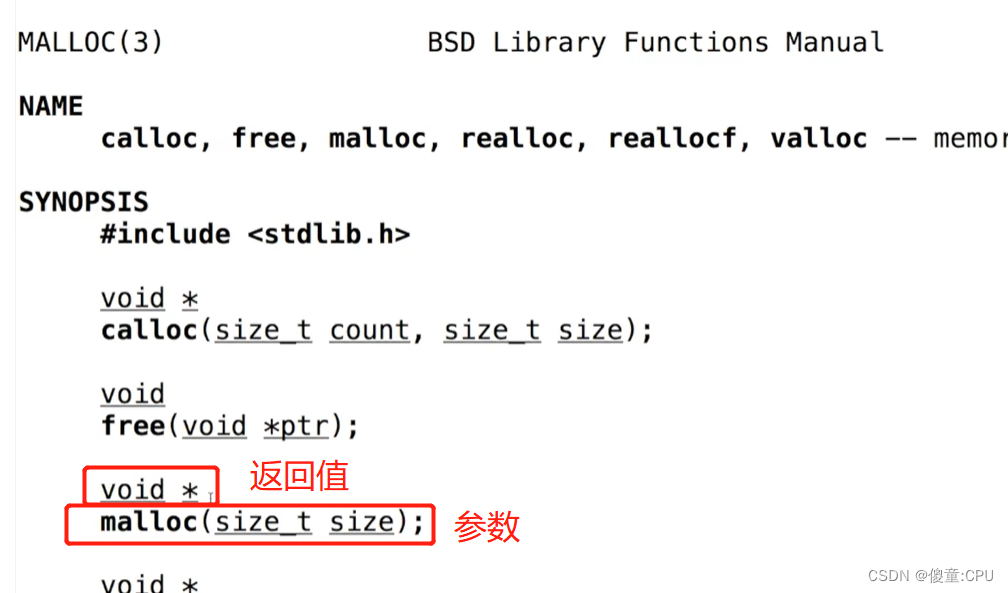
参考资源链接:[C语言指针详细讲解ppt课件](https://wenku.csdn.net/doc/64a2190750e8173efdca92c4?spm=1055.2635.3001.10343)
# 1. 指针与内存管理基础
## 1.1 内存管理的重要性
内存管理是编写高效、稳定程序的核心部分。掌握内存管理的基础知识,有助于防止程序中出现内存泄漏、指针错误等问题,这对于软件的性能和可靠性
【射频天线设计全攻略】:CST仿真流程与案例深度解析
参考资源链接:[CST微波工作室初学者教程:电磁仿真轻松入门](https://wenku.csdn.net/doc/6401ad40cce7214c316eed7a?spm=1055.2635.3001.10343)
# 1. 射频天线设计基础概述
## 射频天线的重要性与应用场景
射频(Radio Frequency,RF)天线作为无线通信系统中不可或缺的组成部分,负责发送和接收无线信号。它们广泛应
数据仓库集成大揭秘:Kettle全量同步的流向解析
参考资源链接:[Kettle全量多表数据同步教程](https://wenku.csdn.net/doc/646eb837d12cbe7ec3f092fe?spm=1055.2635.3001.10343)
# 1. 数据仓库集成简介
在数字化时代,数据已成为企业最宝贵的资产之一。数据仓库集成作为企业信息系统中不可或缺的组成部分,扮演着至关重要的角色。通过对数据的整合,企业能够洞察业务趋势,
GC2083性能优化全攻略:实战技巧助你轻松升级
参考资源链接:[GC2083CSP: 1/3.02'' 2Mega CMOS Image Sensor 数据手册](https://wenku.csdn.net/doc/50kdu1upix?spm=1055.2635.3001.10343)
# 1. GC2083性能优化概述
## 1.1 性能优化的必要性
GC2083系统作为企业级应用的基石,其
数字设计原理与实践第四版深度剖析:掌握数字设计核心秘诀

参考资源链接:[John F.Wakerly《数字设计原理与实践》第四版课后答案解析:逻辑图与数制转换](https://wenku.csdn.net/doc/1qxugirwra?spm=1055.2635.3001.10343)
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )