STM32G431开发板初体验:新手必看的10个实用入门技巧
发布时间: 2024-12-15 14:37:04 阅读量: 4 订阅数: 4 
参考资源链接:[STM32G431开发板详解:接口与芯片原理图指南](https://wenku.csdn.net/doc/6462d47e543f844488995d9c?spm=1055.2635.3001.10343)
# 1. STM32G431开发板概述
## 1.1 STM32G431开发板简介
STM32G431是ST公司生产的一款高性能的ARM Cortex-M4微控制器。其具有丰富的外设接口和灵活的时钟管理能力,支持多种通讯协议,如USB、CAN、I2S等。以最小的功耗实现高效的信号处理和控制算法,特别适合于工业控制、电力电子、医疗设备等应用领域。
## 1.2 开发板的主要性能特点
- 核心频率:最高可达170MHz。
- 内存资源:拥有128KB的闪存和32KB的RAM。
- 模拟性能:集成的ADC和DAC,适合高精度数据采集和输出。
- 多样的通讯接口:支持USB、I2C、SPI、UART等多种通讯协议。
- 高级电源管理:支持睡眠模式和低功耗运行,保证长时间稳定工作。
## 1.3 开发板的应用领域
STM32G431开发板广泛应用于各种嵌入式系统开发项目中,例如:
- 工业自动化控制
- 智能家居系统
- 医疗监测设备
- 消费电子产品
通过后续章节,我们将逐步探索如何设置和使用STM32G431开发板,从而能够开发出多样化的应用项目。
# 2. STM32G431开发环境搭建
在开始开发STM32G431项目之前,必须要有一个合适的开发环境。好的起点可以帮助我们减少遇到的障碍,加快开发进程。本章将向您展示如何搭建一个针对STM32G431的开发环境。从安装必须的软件工具开始,到初始化开发板,再到下载和调试程序,本章将一步步地引导您建立一个完整的开发流程。
## 2.1 安装必要的软件工具
### 2.1.1 Keil uVision的安装与配置
Keil uVision是众多嵌入式开发者首选的集成开发环境(IDE),对于基于ARM Cortex-M4的STM32G431微控制器来说,Keil提供了一系列强大的开发工具。以下是安装和配置Keil uVision的步骤:
1. **访问官方网站**:首先,您需要访问Keil官网下载最新版本的Keil uVision软件。如果您是学生或教师,还有可能申请到教育版本的免费许可。
2. **下载安装程序**:根据您的操作系统版本(通常是Windows),下载对应版本的安装程序。
3. **运行安装向导**:双击下载的安装包,执行安装向导。在安装过程中,需要同意许可协议,选择安装路径,以及选择需要安装的组件。
4. **配置license**:安装完成后,首次启动时需要进行license配置。如果您已经拥有有效的license,请根据提示输入相关信息。没有license的话,可以选择评估版使用限制功能。
5. **安装板级支持包(BSP)**:Keil通常会提供针对STM32系列芯片的BSP。需要从官网下载并安装适用于STM32G431的BSP,以便于开发板初始化和快速编程。
```mermaid
graph LR
A[开始安装Keil uVision] --> B[访问官方网站下载]
B --> C[运行安装向导]
C --> D[配置license信息]
D --> E[安装板级支持包]
E --> F[安装完成,启动Keil uVision]
```
### 2.1.2 STM32CubeMX的安装与配置
STM32CubeMX是ST官方提供的另一款强大的软件,它可以通过图形化的用户界面帮助我们快速配置微控制器的各种参数。以下是安装和配置STM32CubeMX的步骤:
1. **下载STM32CubeMX**:从ST官网下载STM32CubeMX安装包。
2. **运行安装程序**:双击下载的安装包,执行安装向导,并遵循指示完成安装。
3. **打开并配置STM32CubeMX**:首次打开STM32CubeMX,需要创建或打开一个项目。通过选择对应的STM32微控制器型号(STM32G431),STM32CubeMX会为您生成初始化代码。
4. **使用代码生成器**:配置您的项目参数后,使用STM32CubeMX的代码生成器功能生成初始化代码。这将包括系统配置、外设初始化等。
5. **集成到Keil uVision**:生成的代码通常需要导入到Keil uVision中进行进一步开发。STM32CubeMX提供了集成到Keil uVision的选项,通过简单的配置可以将项目直接在Keil中打开。
```mermaid
graph LR
A[开始安装STM32CubeMX] --> B[下载STM32CubeMX安装包]
B --> C[运行安装程序]
C --> D[打开STM32CubeMX并创建/打开项目]
D --> E[配置项目参数]
E --> F[使用代码生成器生成代码]
F --> G[集成到Keil uVision]
```
## 2.2 开发板的初始化设置
### 2.2.1 第一次点亮LED灯
为了让开发板开始工作,我们先从点亮一个LED灯开始。这将证明开发环境搭建正确,并且您能对STM32G431微控制器进行基本控制。
1. **连接开发板与电脑**:使用ST-Link连接器,将STM32G431开发板与电脑连接。
2. **打开Keil uVision**:启动Keil uVision,并打开之前通过STM32CubeMX生成的项目。
3. **编写点亮LED的代码**:在main.c文件中编写代码来初始化GPIO并点亮LED。代码示例如下:
```c
#include "main.h"
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
int main(void) {
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_SET); // x为端口和引脚号
while (1) {
}
}
void MX_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOx_CLK_ENABLE(); // x为端口时钟
GPIO_InitStruct.Pin = GPIO_PIN_x;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOx, &GPIO_InitStruct);
}
```
4. **编译与下载程序**:通过Keil uVision的编译按钮编译代码,并通过ST-Link下载程序到开发板。
5. **观察LED点亮**:如果一切顺利,您可以观察到LED灯被点亮。这表明您的开发环境和程序都运行正常。
### 2.2.2 时钟配置与系统启动
时钟系统对于微控制器而言至关重要,它决定了微控制器的运行速度和性能。在STM32G431中,系统启动时需要正确的时钟配置才能保证CPU和外设正常工作。
1. **系统时钟配置**:使用STM32CubeMX可以轻松配置时钟树。在STM32CubeMX中选择所需的时钟源(如内部高速时钟、外部高速时钟等)和分频器来设置系统时钟。
2. **生成初始化代码**:根据配置生成初始化代码后,您可以打开Keil uVision并检查生成的代码。通常,系统时钟配置函数会在main函数的SystemClock_Config()中。
3. **时钟启动函数**:在main函数中调用SystemClock_Config()确保时钟配置被正确初始化。
4. **编译、下载并运行**:完成上述步骤后,编译项目,下载代码到STM32G431开发板。开发板在启动后,将按照配置好的时钟运行。
```c
void SystemClock_Config(void) {
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
// 初始化时钟源,设置PLL系数
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 5;
RCC_OscInitStruct.PLL.PLLN = 192;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 2;
RCC_OscInitStruct.PLL.PLLR = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) {
Error_Handler();
}
// 配置系统时钟
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK
| RCC_CLOCKTYPE_PCLK1 | RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK) {
Error_Handler();
}
}
```
## 2.3 调试与下载程序
### 2.3.1 使用ST-Link进行程序下载
使用ST-Link下载器,您可以轻松地将编译好的程序下载到STM32G431开发板上。
1. **安装ST-Link驱动**:如果您的电脑尚未安装ST-Link驱动,您需要从ST官网下载安装驱动。
2. **连接ST-Link与开发板**:使用ST-Link的USB接口连接您的电脑,并将ST-Link的调试接口与STM32G431开发板的调试口连接。
3. **在Keil uVision中配置下载器**:在Keil uVision中打开项目的"Options for Target",选择"Debug"页签,选择"Use: ST-Link Debugger"。
4. **下载程序**:在Keil uVision中点击下载按钮,程序将被编译并下载到开发板。
5. **开始调试**:点击调试按钮,开始调试会话。您可以设置断点,单步执行程序,观察变量和内存,以及进行各种调试操作。
```mermaid
graph LR
A[开始使用ST-Link下载程序] --> B[安装ST-Link驱动]
B --> C[连接ST-Link与开发板]
C --> D[配置Keil uVision的下载器]
D --> E[下载程序]
E --> F[开始调试]
```
### 2.3.2 使用调试器跟踪程序执行
在开发和调试阶段,能够观察程序在微控制器上的运行情况对于理解程序行为和定位问题至关重要。
1. **设置断点**:在Keil uVision代码编辑器中,您可以双击左侧的空白区域来设置断点。程序在运行到断点处时会自动暂停。
2. **开始调试会话**:通过点击Keil uVision的"Debug"按钮开始调试会话。
3. **单步执行**:使用F11键单步执行程序,观察每一步程序如何影响微控制器的寄存器和内存。
4. **监视变量**:在调试视图中,可以添加监视变量,以实时观察变量的值和状态变化。
5. **调用堆栈查看**:查看调用堆栈窗口,了解函数调用顺序和堆栈情况。
```c
// 示例代码,演示如何在断点停止和单步执行
void delay(uint32_t count) {
volatile uint32_t i;
for (i = 0; i < count; i++) {
__NOP(); // No Operation
}
}
int main(void) {
while (1) {
delay(1000000); // 延时函数
}
}
```
通过以上步骤,您将能够在Keil uVision中使用ST-Link调试器来下载和跟踪STM32G431的程序执行情况。结合这些工具和方法,将有助于您深入理解和控制您的开发板。
# 3. STM32G431基础编程技巧
随着对STM32G431开发板的了解逐步深入,我们进入了更实质性的编程技巧学习阶段。本章节将重点介绍如何高效地运用STM32G431的硬件特性进行基础编程,特别是掌握GPIO操作、中断和定时器以及模拟数字转换器(ADC)和数字模拟转换器(DAC)的应用。
## 3.1 GPIO操作技巧
GPIO(通用输入输出)引脚是微控制器与外部世界交互的基本通道。掌握GPIO操作对于实现几乎所有的硬件功能至关重要。以下是如何操作STM32G431 GPIO的基础知识。
### 3.1.1 GPIO基本配置方法
STM32G431的GPIO引脚具有复用功能,这意味着它们可以被配置为多种模式以满足不同的应用需求。在Keil uVision或STM32CubeMX工具中,可以通过图形化界面或直接编辑配置文件来进行引脚的配置。
首先,我们需要定义引脚的模式,比如是作为输入、输出还是模拟输入等。以输出模式为例,以下是代码示例:
```c
#include "stm32g4xx_hal.h"
void HAL_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PA5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
// 使用示例
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); // 设置PA5为高电平
```
在上述代码中,我们首先启用了GPIOA端口的时钟,这是进行GPIO操作前的必要步骤。然后,定义了一个GPIO初始化结构体并初始化了PA5引脚作为推挽输出模式,最后通过`HAL_GPIO_WritePin`函数控制PA5引脚的电平。
### 3.1.2 输入输出模式下的使用技巧
理解了GPIO的基本配置之后,接下来是更深入地理解输入输出模式下的使用技巧。
在输入模式下,可以配置引脚为浮空输入、上拉输入或下拉输入。根据实际应用,选择不同的输入模式可以增强电路的抗干扰能力和节约功耗。例如,当需要外部设备驱动GPIO输入时,通常选择浮空模式。
在输出模式下,除了简单的高低电平输出,还可以配置输出为开漏模式。这种模式下,GPIO引脚可以连接成“线与”逻辑电路。这在多个设备共用一个信号线的情况下特别有用。
```c
/* 配置引脚为开漏输出 */
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD; // 开漏输出
GPIO_InitStruct.Pull = GPIO_PULLUP; // 内部上拉
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* 开漏模式下输出低电平 */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
```
## 3.2 中断与定时器
STM32G431提供了强大的中断和定时器功能,可以用于事件处理、精确计时和定时任务执行。
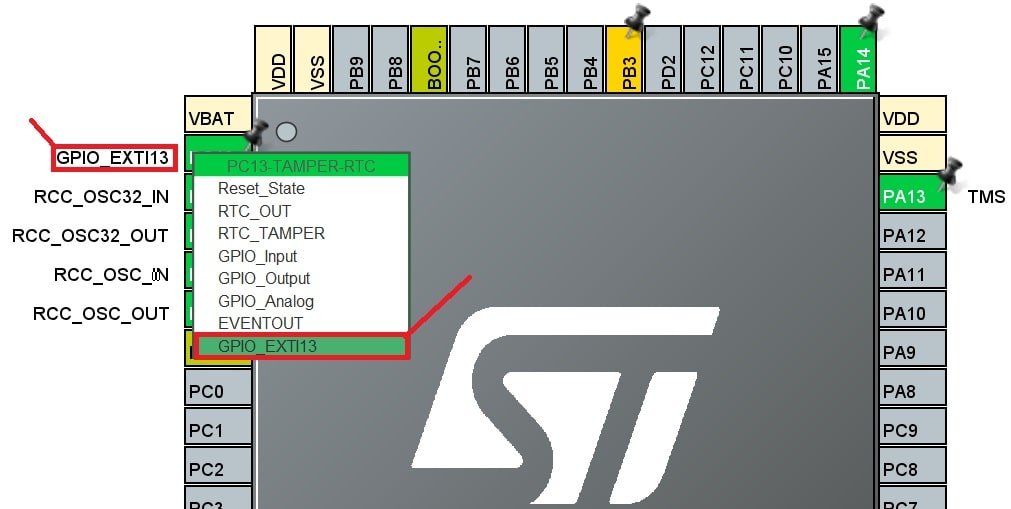
### 3.2.1 外部中断的配置和处理
在STM32G431中配置外部中断需要设置中断线路、触发事件(上升沿、下降沿或双边沿触发)、优先级,并在中断服务程序中处理中断事件。
```c
void EXTI0_IRQHandler(void)
{
if(__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_0) != RESET)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_0);
// 处理中断事件
}
}
```
### 3.2.2 定时器的配置和应用
定时器在很多应用中都非常重要,比如用于产生精确的延时、测量时间间隔或者生成PWM波形等。以下是配置基本定时器的代码示例:
```c
TIM_HandleTypeDef htim2;
TIM_OC_InitTypeDef sConfigOC = {0};
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 65535;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
HAL_TIM_Base_Init(&htim2);
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig);
HAL_TIM_PWM_Init(&htim2);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 32767;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_Base_Start(&htim2);
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
}
// 使用示例
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_1, 16384); // 设置PWM占空比
```
以上代码演示了如何使用STM32 HAL库初始化一个基本的定时器,并配置它为PWM输出。
## 3.3 ADC与DAC应用
STM32G431的ADC和DAC功能使得它能够轻松处理模拟信号。
### 3.3.1 模拟数字转换器(ADC)的使用
STM32G431具有多通道的12位精度ADC,可以对多个通道进行采样,并且拥有DMA和多通道扫描等高级特性。
```c
ADC_HandleTypeDef hadc1;
void MX_ADC1_Init(void)
{
ADC_ChannelConfTypeDef sConfig = {0};
hadc1.Instance = ADC1;
hadc1.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2;
hadc1.Init.Resolution = ADC_RESOLUTION_12B;
hadc1.Init.ScanConvMode = ENABLE;
hadc1.Init.ContinuousConvMode = DISABLE;
hadc1.Init.DiscontinuousConvMode = DISABLE;
hadc1.Init.ExternalTrigConvEdge = ADC_EXTERNALTRIGCONVEDGE_NONE;
hadc1.Init.ExternalTrigConv = ADC_SOFTWARE_START;
hadc1.Init.DataAlign = ADC_DATAALIGN_RIGHT;
hadc1.Init.NbrOfConversion = 1;
hadc1.Init.DMAContinuousRequests = DISABLE;
hadc1.Init.EOCSelection = ADC_EOC_SINGLE_CONV;
if (HAL_ADC_Init(&hadc1) != HAL_OK)
{
// 初始化失败处理
}
sConfig.Channel = ADC_CHANNEL_0;
sConfig.Rank = 1;
sConfig.SamplingTime = ADC_SAMPLETIME_1CYCLE_5;
if (HAL_ADC_ConfigChannel(&hadc1, &sConfig) != HAL_OK)
{
// 配置通道失败处理
}
}
// 开始转换并获取结果
HAL_ADC_Start(&hadc1);
HAL_ADC_PollForConversion(&hadc1, HAL_MAX_DELAY);
uint32_t adcValue = HAL_ADC_GetValue(&hadc1);
```
### 3.3.2 数字模拟转换器(DAC)的使用
STM32G431的DAC功能通常用于生成模拟信号,如音频信号或特定波形。
```c
DAC_HandleTypeDef hdac;
void MX_DAC_Init(void)
{
DAC_ChannelConfTypeDef sConfig = {0};
hdac.Instance = DAC_CHANNEL_1;
if (HAL_DAC_Init(&hdac) != HAL_OK)
{
// 初始化失败处理
}
sConfig.DAC_Trigger = DAC_TRIG_NONE;
sConfig.DAC_OutputBuffer = DAC_OUTPUTBUFFER_ENABLE;
if (HAL_DAC_ConfigChannel(&hdac, &sConfig, DAC_CHANNEL_1) != HAL_OK)
{
// 配置通道失败处理
}
}
// 设置DAC输出值
HAL_DAC_SetValue(&hdac, DAC_CHANNEL_1, DAC_ALIGN_12B_R, 2048);
```
在这段代码中,我们初始化了DAC通道,并设置其输出值。
以上就是第三章的内容,我们详细介绍了STM32G431的GPIO操作技巧,中断与定时器的配置和应用,以及ADC和DAC的功能使用。每个小节都有代码示例、逻辑分析和参数说明,确保读者能够循序渐进地理解和掌握这些基础编程技巧。
继续第四章的内容,将会深入探讨STM32G431的进阶应用,包括串口通信、实时时钟应用和低功耗模式的实现。
# 4. STM32G431进阶应用
在上一章节中,我们对STM32G431开发板的基础编程技巧进行了深入探讨,包括GPIO、中断、定时器、ADC与DAC等方面的应用。本章节,我们将进入更高级的应用领域,探索STM32G431的进阶功能,如串口通信、实时时钟(RTC)、以及低功耗模式的实现。
## 4.1 串口通信与调试
串口通信是嵌入式系统中最为常见的通信方式之一,因其简单的硬件连接和稳定的数据传输受到广泛应用。STM32G431提供了多个硬件串口,大大方便了开发者进行数据传输。
### 4.1.1 串口基本配置与数据传输
配置STM32G431的串口,首先需要使用STM32CubeMX生成初始化代码,然后根据需要设置相关参数,包括波特率、数据位、停止位和校验位等。配置完成后,通过编写应用代码发送和接收数据。
```c
/* 串口初始化配置示例 */
void USARTx_Init(void) {
/* 初始化串口参数 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
if (HAL_UART_Init(&huart1) != HAL_OK) {
/* 初始化错误处理 */
Error_Handler();
}
}
/* 发送数据 */
void UART_Transmit(uint8_t *pData, uint16_t Size) {
HAL_UART_Transmit(&huart1, pData, Size, 1000);
}
/* 接收数据 */
void UART_Receive(uint8_t *pData, uint16_t Size) {
HAL_UART_Receive(&huart1, pData, Size, 1000);
}
```
在上述代码中,`USARTx_Init` 函数用于初始化串口配置,`UART_Transmit` 和 `UART_Receive` 则分别用于数据的发送和接收。请注意,实际使用时可能需要根据硬件连接和需求调整引脚配置和中断优先级等。
### 4.1.2 调试输出与错误处理
对于开发人员来说,串口调试是不可或缺的。STM32G431的串口不仅能够进行数据通信,还可以作为调试输出的通道。使用`printf`函数可以方便地将调试信息通过串口发送到PC端的串口调试助手。这需要使用到C标准库中的`_write`函数重定向。
```c
/* 重定向_write函数 */
int _write(int file, char *ptr, int len) {
HAL_UART_Transmit(&huart1, (uint8_t *)ptr, len, 1000);
return len;
}
```
当配置好重定向后,就可以使用`printf`函数输出调试信息了,非常方便进行程序的调试和信息输出。一旦发生错误或程序异常,应立即停止当前操作,并输出错误信息。
## 4.2 实时时钟(RTC)的应用
STM32G431集成了实时时钟模块,允许开发人员跟踪真实世界时间。这对于需要时间记录或计时功能的应用至关重要。
### 4.2.1 RTC的配置和时间管理
配置RTC需要正确设置时钟源并启动时钟。一般使用外部32.768kHz晶振作为RTC的时钟源。
```c
/* RTC配置示例 */
void RTC_Configuration(void) {
/* 确保LSE已启动 */
if (HAL_RCCEx_LSEConfig(RCC_LSE_ON) != HAL_OK) {
/* 启动LSE失败处理 */
Error_Handler();
}
/* 等待LSE就绪 */
while (HAL_RCCEx_GetLSEState() != RCC_LSE_READY);
/* 使能PWR和BKP外设的时钟 */
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_RCC_BKP_CLK_ENABLE();
/* 允许访问备份寄存器 */
PWR->CR |= PWR_CR_DBP;
/* 选择LSE作为RTC时钟源 */
RCC->BDCR |= RCC_BDCR_RTCSEL_0;
/* 使能RTC时钟 */
RCC->BDCR |= RCC_BDCR_RTCEN;
/* 初始化RTC */
hrtc.Instance = RTC;
hrtc.Init.HourFormat = RTC_HOURFORMAT_24;
hrtc.Init.AsynchPrediv = 0x7F;
hrtc.Init.SynchPrediv = 0x00FF;
hrtc.Init.OutPut = RTC_OUTPUT_DISABLE;
hrtc.Init.OutPutPolarity = RTC_OUTPUT_POLARITY_HIGH;
hrtc.Init.OutPutType = RTC_OUTPUT_TYPE_OPENDRAIN;
if (HAL_RTC_Init(&hrtc) != HAL_OK) {
/* 初始化错误处理 */
Error_Handler();
}
}
```
在初始化RTC后,开发人员可以设置时间、日期,并进行时间管理和闹钟功能的配置。
### 4.2.2 时间报警和时间戳功能
设置RTC报警功能可以让系统在特定时间执行特定任务。时间戳功能则允许记录事件发生的确切时间。
```c
/* RTC时间报警配置示例 */
void RTC_Alarm_Configuration(void) {
RTC_AlarmTypeDef sAlarm;
/* 填充RTC报警结构体 */
sAlarm.AlarmTime.Hour = 12;
sAlarm.AlarmTime.Minute = 30;
sAlarm.AlarmTime.Second = 0;
sAlarm.AlarmMask = RTC_ALARMMASK_NONE; // 不屏蔽任何报警
sAlarm.AlarmSubSecond = 0;
sAlarm.AlarmDateWeekDay = RTC_WEEKDAY_FRIDAY;
sAlarm.AlarmDateMonthDay = 0x1F; // 月份中的第31天
/* 配置报警 */
if (HAL_RTC_SetAlarm_IT(&hrtc, &sAlarm) != HAL_OK) {
/* 报警配置错误处理 */
Error_Handler();
}
}
/* 时间戳功能获取当前时间 */
void Get_Current_TimeStamp(uint32_t *timestamp) {
RTC_TimeTypeDef sTime;
RTC_DateTypeDef sDate;
HAL_RTC_GetTime(&hrtc, &sTime, RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc, &sDate, RTC_FORMAT_BIN);
/* 格式化时间戳 */
*timestamp = (sDate.WeekDay << 28) | (sDate.Month << 24) | (sDate.Date << 16) | (sTime.Hours << 11) | (sTime.Minutes << 5) | sTime.Seconds;
}
```
时间报警和时间戳功能对于需要时间敏感操作的应用(如事件日志记录)来说非常重要。
## 4.3 低功耗模式的实现
STM32G431提供了多种低功耗模式,通过优化功耗管理策略,可以极大地延长设备的电池寿命。
### 4.3.1 不同低功耗模式介绍
STM32G431支持多种低功耗模式,包括睡眠模式、停止模式和待机模式。每种模式下,设备的功耗不同,能够执行的功能也不同。
- 睡眠模式:CPU停止运行,外设继续工作。
- 停止模式:CPU和外设停止工作,仅部分外设如RTC可以继续工作。
- 待机模式:所有时钟停止,只有外部中断、闹钟事件和NRST引脚复位可以唤醒设备。
### 4.3.2 动态电源管理策略
动态电源管理(DPM)允许软件根据应用程序的需求动态调整设备的功耗。这通常涉及根据任务的需求开启或关闭不同的低功耗模式。
```c
/* 低功耗模式配置函数 */
void Enter_LowPowerMode(void) {
/* 根据具体需求选择低功耗模式 */
if (/* 条件 */) {
// 进入睡眠模式
} else if (/* 条件 */) {
// 进入停止模式
} else {
// 进入待机模式
}
}
/* 唤醒处理函数 */
void WakeUp_Handler(void) {
/* 处理唤醒后的逻辑 */
}
/* 主循环中调用低功耗函数 */
int main(void) {
/* 系统初始化 */
HAL_Init();
/* 系统时钟配置 */
SystemClock_Config();
/* 其他初始化代码 */
while (1) {
/* 应用逻辑 */
// ...
Enter_LowPowerMode(); // 进入低功耗模式
WakeUp_Handler(); // 唤醒处理
}
}
```
在实际应用中,需要根据任务的性质和频率来动态选择最合适的低功耗模式,以确保既能保持系统响应,又能尽可能减少能耗。
通过本章节的介绍,我们探索了STM32G431进阶应用中的串口通信、实时时钟模块以及低功耗模式的实现方法。这些技巧和知识点对于提高STM32G431开发板应用的灵活性和稳定性有着重要作用。在下一章节中,我们将进入实战案例分析,通过具体的项目来综合运用本章节及之前章节的知识。
# 5. STM32G431项目实战案例
## 5.1 简单的温湿度传感器系统
随着物联网技术的普及,搭建一个温湿度传感器系统成为了许多嵌入式开发者尝试的第一个项目。STM32G431开发板因其高性能和丰富的外设接口,非常适合用于这样的项目。
### 5.1.1 硬件连接与传感器选型
首先,你需要选择合适的温湿度传感器。DHT11和DHT22是常用的低成本温湿度传感器。它们都可以通过单一的数字信号线与MCU通信。对于STM32G431开发板,我们可以轻松地将传感器的VCC、GND和数据线连接到相应的开发板接口。
下面是一个简单的硬件连接步骤:
1. 确定DHT22传感器的数据线、VCC和GND分别连接到STM32G431开发板的某个GPIO口、3.3V和GND。
2. 确保连接过程中没有任何短路。
3. 在Keil uVision中配置相应的GPIO口为输入模式。
### 5.1.2 数据采集与显示
采集温湿度数据是这个项目的核心部分。你需要按照DHT22的数据手册,通过编程实现对数据的精确采集。STM32G431的HAL库提供了对GPIO操作的支持,可以简化数据采集的过程。
以下是一个数据采集与显示的示例代码:
```c
#include "stm32g4xx_hal.h"
#include "dht22.h" // 假设你有一个适合DHT22的驱动库
int main(void) {
HAL_Init(); // 初始化HAL库
// ...其他必要的初始化代码...
while(1) {
float temperature, humidity;
DHT22_Read(&temperature, &humidity); // 使用DHT22驱动读取温度和湿度
// 显示温度和湿度,这里仅作为示例
printf("Temperature: %.2f C\n", temperature);
printf("Humidity: %.2f %%RH\n", humidity);
HAL_Delay(1000); // 等待一段时间再读取下一次数据
}
}
```
上面的代码中,`DHT22_Read`函数负责读取传感器数据,`printf`函数用于通过串口发送数据到电脑进行显示。实现这个功能需要在`dht22.h`中编写DHT22的具体驱动代码,或者使用现有的库函数。
## 5.2 基于蓝牙的远程控制项目
蓝牙技术的应用让远程控制变得方便快捷。本节将展示如何将蓝牙模块与STM32G431开发板集成,并实现基本的远程控制逻辑。
### 5.2.1 蓝牙模块的集成与配置
要实现基于蓝牙的远程控制,你需要选择一个与STM32G431兼容的蓝牙模块。通常,这类模块通过串口与STM32G431通信。因此,你需要将蓝牙模块的TX和RX引脚分别连接到STM32G431的RX和TX引脚上。
### 5.2.2 远程控制逻辑实现
实现远程控制逻辑需要编写代码以处理蓝牙模块接收到的数据,并据此执行特定动作。例如,你可能需要控制一组LED灯或电机。
下面是一个远程控制LED灯的示例代码片段:
```c
// 假设蓝牙模块接收到的命令格式是"CMD:ON"或"CMD:OFF"
if (ReceivedData == "CMD:ON") {
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_SET); // 打开LED灯
} else if (ReceivedData == "CMD:OFF") {
HAL_GPIO_WritePin(GPIOx, GPIO_PIN_x, GPIO_PIN_RESET); // 关闭LED灯
}
```
在这段代码中,`ReceivedData`是通过蓝牙接收到的字符串,`GPIOx`和`GPIO_PIN_x`需要替换为实际使用的GPIO口。`HAL_GPIO_WritePin`函数用于控制GPIO口的高低电平。
## 5.3 电机控制与调速
电机控制是嵌入式系统中常见的应用之一。在这部分,我们来探讨如何使用STM32G431开发板实现电机的调速和方向控制。
### 5.3.1 电机驱动电路的设计
电机驱动电路可以使用H桥驱动芯片,例如L298N。该芯片能够控制电机的方向和速度,而STM32G431的GPIO口可以提供足够的信号来驱动这些芯片。
电路设计上,你需要确保STM32G431的GPIO口与L298N的输入端相连,并提供适当的电源来驱动电机。
### 5.3.2 PWM调速与反馈控制
PWM(脉冲宽度调制)是一种广泛应用于电机控制的方法。通过改变PWM信号的占空比,可以控制电机的速度。STM32G431提供了丰富的定时器,可以用来生成PWM信号。
下面是一个简单的PWM调速代码示例:
```c
// 假设TIMx是用于PWM的定时器,Channel1是连接到电机驱动器的通道
HAL_TIM_PWM_Start(&htimx, TIM_CHANNEL_1); // 启动定时器的PWM输出
// 设置PWM信号占空比来改变电机速度
__HAL_TIM_SET_COMPARE(&htimx, TIM_CHANNEL_1, dutyCycle);
```
在上述代码中,`htimx`是定时器的句柄,`TIM_CHANNEL_1`是PWM通道。`dutyCycle`变量决定了PWM信号的占空比,进而控制了电机的速度。`__HAL_TIM_SET_COMPARE`函数用于设置占空比。
在实际应用中,电机的速度和位置反馈控制往往是必要的。可以使用编码器获取电机的实时位置和速度信息,并通过PID算法进行调整,以达到精确控制的目的。
第五章的实战案例涵盖从基本的温湿度检测到复杂的蓝牙控制和电机驱动。通过本章的学习,你应该能够独立完成一个基于STM32G431开发板的项目。第六章将深入探讨如何进行性能优化和故障排查,进一步提升你的开发能力和产品稳定性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
PSS_E高级应用:专家揭秘模型构建与仿真流程优化
参考资源链接:[PSS/E程序操作手册(中文)](https://wenku.csdn.net/doc/6401acfbcce7214c316eddb5?spm=1055.2635.3001.10343)
# 1. PSS_E模型构建的理论基础
在探讨PSS_E模型构建的理论基础之前,首先需要理解其在电力系统仿真中的核心作用。PSS_E模型不仅是一个分析工具,它还是一种将理论与实践相结合、指导电力系统设计与优化的方法论。构建PSS_E模型的理论基础涉及多领域的知识,包括控制理论、电力系统工程、电磁学以及计算机科学。
## 1.1 PSS_E模型的定义和作用
PSS_E(Power Sys
【BCH译码算法深度解析】:从原理到实践的3步骤精通之路

参考资源链接:[BCH码编解码原理详解:线性循环码构造与多项式表示](https://wenku.csdn.net/doc/832aeg621s?spm=1055.2635.3001.10343)
# 1. BCH译码算法的基础理论
## 1.1
DisplayPort 1.4线缆和适配器选择秘籍:专家建议与最佳实践
参考资源链接:[display_port_1.4_spec.pdf](https://wenku.csdn.net/doc/6412b76bbe7fbd1778d4a3a1?spm=1055.2635.3001.10343)
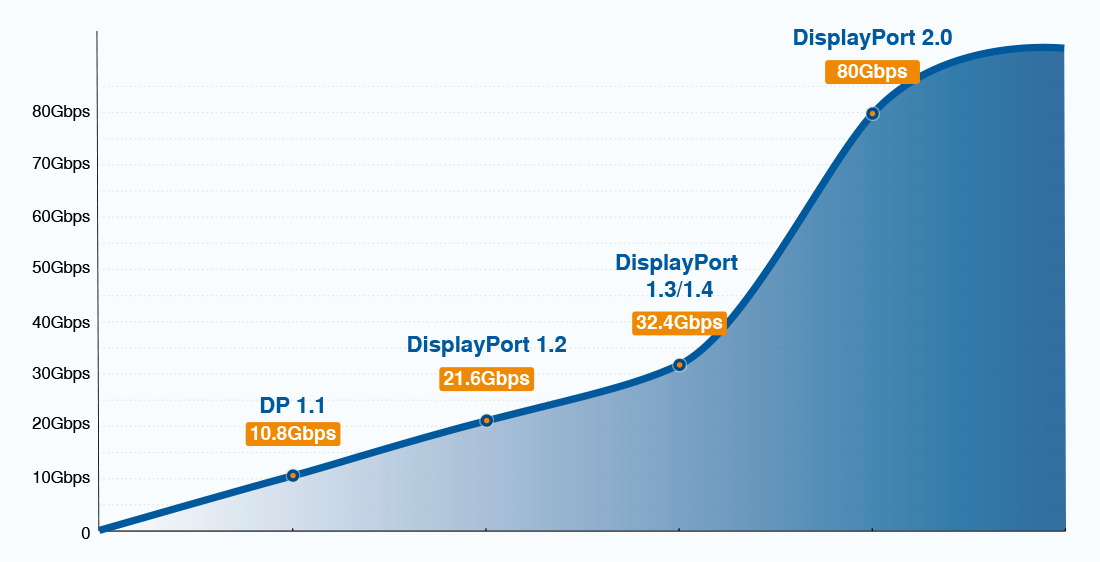
# 1. DisplayPort 1.4技术概述
随着显示技术的不断进步,DisplayPort 1.4作为一项重要的接
全志F133+JD9365液晶屏驱动配置入门指南:新手必读
参考资源链接:[全志F133+JD9365液晶屏驱动配置操作流程](https://wenku.csdn.net/doc/1fev68987w?spm=1055.2635.3001.10343)
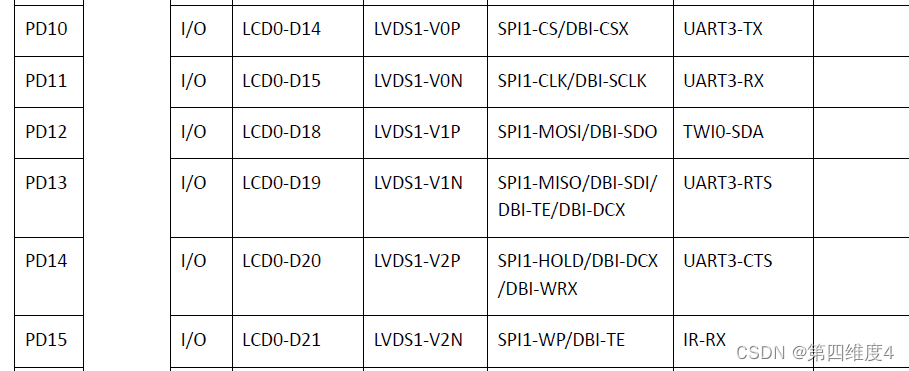
# 1. 全志F133与JD9365液晶屏驱动概览
液晶屏作为现代显示设备的重要组成部分,其驱动程序的开发与优化直接影响到设备的显示效果和用户交互体验。全志F133处理器与JD9365液晶屏的组合,是工
【C语言输入输出高效实践】:提升用户体验的技巧大公开
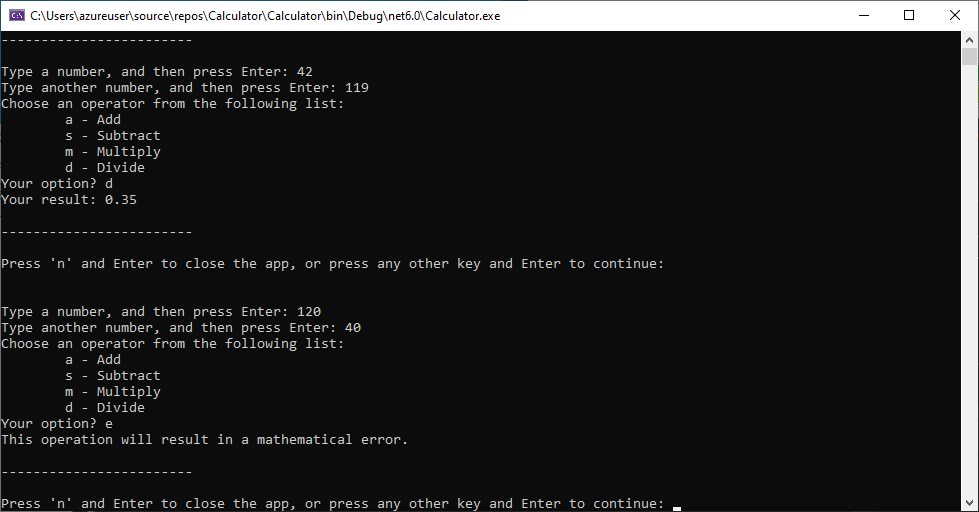
参考资源链接:[编写一个支持基本运算的简单计算器C程序](https://wenku.csdn.net/doc/4d7dvec7kx?spm=1055.2635.3001.10343)
# 1. C语言输入输出基础与原理
## 1.1 C语言输入输出概述
PowerBuilder性能优化全攻略:6.0_6.5版本性能飙升秘籍
参考资源链接:[PowerBuilder6.0/6.5基础教程:入门到精通](https://wenku.csdn.net/doc/6401abbfcce7214c316e959e?spm=1055.2635.3001.10343)
# 1. PowerBuilder基础与性能挑战
## 简介
PowerBuilder,一个由Sybase公司开发的应用程序开发工具,以其快速应用开发(RAD)的特性,成为了许多开发者的首选。然而
【体系结构与编程协同】:系统软件与硬件协同工作第六版指南
参考资源链接:[量化分析:计算机体系结构第六版课后习题解答](https://wenku.csdn.net/doc/644b82f6fcc5391368e5ef6b?spm=1055.2635.3001.10343)
# 1. 系统软件与硬件协同的基本概念
## 1.1 系统软件与硬件协同的重要性
在现代计算机系统中,系统软件与硬件的协同工作是提高计算机性能和效率的关键。系统软件包括操作系统、驱动
【故障排查大师】:FatFS错误代码全解析与解决指南

参考资源链接:[FatFS文件系统模块详解及函数用法](https://wenku.csdn.net/doc/79f2wogvkj?spm=1055.263
从零开始:构建ANSYS Fluent UDF环境的最佳实践
参考资源链接:[2020 ANSYS Fluent UDF定制手册(R2版)](https://wenku.csdn.net/doc/50fpnuzvks?spm=1055.2635.3001.10343)
# 1. ANSYS Fluent UDF基础知识概述
## 1.1 UDF的定义与用途
ANSYS Fluent UDF(User-Defined Functions)是一种允许用户通
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )