【编程Cortex-M3_M4】:新手到专家的逐步教程
发布时间: 2025-01-05 02:43:34 阅读量: 33 订阅数: 16 

cortex-M3、Cortex-M4权威指南 英文原版
# 摘要
本文首先介绍了Cortex-M3/M4微控制器的基础知识和硬件架构。详细阐述了Cortex-M3/M4的核心特征,包括处理器核心、指令集、内存保护单元和异常处理机制,并探讨了系统级接口以及外设、中断控制器和电源管理组件的作用。进一步,本文深入讲解了Cortex-M3/M4编程基础,如基础指令集、汇编语言编程、Thumb-2技术和混合编程技巧,并介绍了开发环境和工具链的使用。在Cortex-M3/M4应用开发实践中,研究了中断处理、外设控制、驱动编写和系统性能优化。最后,探讨了高级应用编程技巧,算法实现,并分析了典型应用项目案例,展示了如何将理论知识应用于实际开发中。
# 关键字
Cortex-M3/M4;硬件架构;编程基础;应用开发;系统性能优化;高级应用项目
参考资源链接:[Cortex M3与M4权威指南(第三版):深入理解ARM处理器](https://wenku.csdn.net/doc/3zdsfhe1rg?spm=1055.2635.3001.10343)
# 1. Cortex-M3/M4微控制器简介
随着物联网和智能设备的发展,Cortex-M3/M4微控制器以其高效能和实时性能,成为了嵌入式开发领域的热门选择。ARM公司设计的Cortex-M3/M4系列,提供了在成本效益和性能之间的理想平衡,尤其适合于需要高性能处理能力的中高端应用。
Cortex-M3和M4在内部架构上大体相似,但M4加入了数字信号处理(DSP)指令集和浮点单元(FPU),使得其在音频处理、控制算法等要求更复杂数据处理的应用中更具优势。两款微控制器都提供了高效的中断响应能力,适合需要快速处理外部事件的场合。
对于开发者而言,理解Cortex-M3/M4的架构和编程特点,可以更好地利用其资源,进行高效的应用开发。接下来的章节将深入探讨Cortex-M3/M4的硬件架构、编程基础、应用开发实践以及高级应用案例,为希望深入这一领域的专业人士提供详细的参考指南。
# 2. Cortex-M3/M4的硬件架构
## 2.1 Cortex-M3/M4核心特征
### 2.1.1 处理器核心和指令集
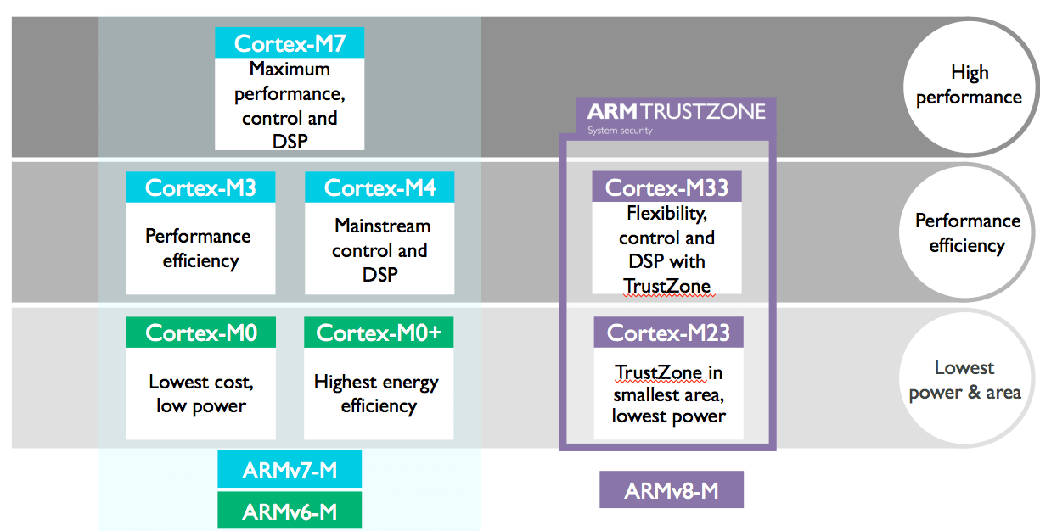
Cortex-M3和Cortex-M4是ARM推出的针对微控制器市场的一系列高性能处理器核心。这些核心被设计为具有高度的能效比,适合于广泛的嵌入式应用,从简单的传感器到复杂的控制系统。Cortex-M3的核心主要基于ARMv7-M架构,而Cortex-M4则在Cortex-M3的基础上增加了浮点运算单元(FPU),支持单精度浮点运算。
在指令集方面,Cortex-M3和Cortex-M4都采用了ARM的Thumb指令集,特别是为微控制器优化的Thumb-2技术。这种指令集的优势在于它结合了32位和16位指令的优点,能在保持32位指令计算能力的同时,以更小的代码大小提升执行效率。例如,简单的算术操作通常只需要一个16位指令,而条件执行可以不带分支地完成,极大地减少了指令数目和提高性能。
### 2.1.2 内存保护单元和异常处理
Cortex-M3/M4的内存保护单元(MPU)是一个可选的硬件组件,它能够提供内存访问控制的功能,使得开发者能够为不同的内存区域设置访问权限,以及划分内存保护区域,以防止软件错误影响到整个系统的稳定性和安全性。MPU通过允许系统在发生访问违规时触发异常处理,从而提供了软件故障隔离的能力。
异常处理方面,Cortex-M3/M4拥有一个高度灵活的异常模型,允许系统根据需要配置不同的异常优先级和响应机制。这允许实时操作系统(RTOS)和应用软件在发生异常时能高效且可靠地进行上下文切换。异常可以来自中断、系统错误或软件触发的操作,它们都通过一个统一的异常处理框架来管理。
## 2.2 系统级接口和组件
### 2.2.1 外设和内存映射
Cortex-M3/M4微控制器通常包含大量的外围设备,这些设备通过内存映射接口与处理器核心相连。这种设计允许外设访问和处理器的主内存区域一样被访问。每种外设寄存器都有一个固定的地址,通过简单的加载和存储指令即可完成对寄存器的访问,这样大大简化了外设控制的编程模型。
在内存映射设计中,外设被组织在一系列的内存空间内。比如,系统控制空间(System Control Space, SCS)包括了如系统定时器、电源控制等与系统运行至关重要的组件,而通用外设空间则包含了如GPIO、UART等通用外设的寄存器。这样的设计有助于提高系统的可扩展性,因为不同的微控制器可以根据需要引入更多或更少的外设,而应用程序无需修改即可继续工作。
### 2.2.2 中断控制器和电源管理
中断系统是微控制器设计中不可或缺的一部分,它允许外设在需要处理器介入处理时能够中断处理器当前的执行流程。Cortex-M3/M4拥有一个高度优化的中断控制器,可以处理多达240个中断源(包括外设中断和系统异常),并且支持中断优先级的灵活配置。
在电源管理方面,Cortex-M3/M4提供了多种低功耗模式,以支持电池供电的便携式应用或能源敏感的应用。这些模式允许处理器在尽可能低的功耗下工作,甚至可以完全关闭处理器核心,只保持内存和一些关键外设的运行。状态保存和恢复机制使得微控制器可以从睡眠模式快速唤醒,且不会丢失重要的系统状态,这对于实时系统尤其重要。
```mermaid
flowchart LR
A[处理器核心] -->|执行指令| B[指令集架构]
B -->|基于| C[Thumb-2技术]
C -->|优化| D[16位和32位指令]
D -->|支持| E[内存保护单元(MPU)]
E -->|配置| F[内存访问权限]
F -->|触发| G[异常处理机制]
G -->|处理| H[中断系统]
H -->|配置| I[中断优先级]
I -->|响应| J[电源管理]
J -->|低功耗| K[多种模式]
```
由于文章需要的是二级章节的内容,以下是部分二级章节的代码块和逻辑分析的示例:
```assembly
; 示例汇编指令集代码
LDR R0, =0x40000000 ; 加载外设地址到寄存器R0
MOV R1, #0x01 ; 将数据0x01加载到寄存器R1
STR R1, [R0] ; 将R1的值存储到R0指向的地址
; 以上代码的作用是配置特定的外设寄存器
```
在上述代码中,首先通过LDR指令将外设的地址加载到寄存器R0中。然后,MOV指令将数值0x01加载到寄存器R1中,这个数值通常代表寄存器的某个初始值或配置位。最后,STR指令将R1中的值存储到R0指向的外设地址中,实现对外设寄存器的配置。这个过程是微控制器编程中常见的操作,用于初始化和配置外设。
以上内容展示了Cortex-M3/M4处理器的硬件架构核心特征部分,包括处理器核心、内存保护单元、系统级接口及组件的要点。接下来的章节将深入到编程基础,为应用开发实践打下坚实的基础。
# 3. Cortex-M3/M4编程基础
## 3.1 基础指令集和汇编语言编程
### 3.1.1 指令集架构概述
Cortex-M3/M4微控制器使用的ARM Cortex-M系列指令集是专为微控制器设计的简化指令集。它保留了ARM指令集的32位长度,并支持Thumb-2技术,这是一种指令集的扩展,旨在提高代码密度和性能。指令集的设计注重于高效执行,以及对中断的快速响应,非常适合实时应用。
ARM Cortex-M系列指令集主要包括以下几种类型:
- 数据处理指令:用于算术和逻辑运算。
- 载入和存储指令:用于内存访问。
- 分支指令:用于程序流程控制。
- 异常产生和处理指令:用于系统异常和中断管理。
- 特殊指令:包括协处理器访问、系统控制和同步等。
### 3.1.2 汇编语言的基本语法和指令应用
汇编语言编程是微控制器领域的一个基础技能,Cortex-M3/M4的汇编语言也不例外。ARM汇编指令通常包含以下部分:
- 操作码(opcode):指示要执行的操作。
- 操作数:指定操作的参数。
- 条件码:可选,指定指令的执行条件。
以下是一个ARM汇编语言的基本示例,实现了一个简单的加法操作:
```assembly
AREA Reset, DATA, READONLY
EXPORT __main
ENTRY
__main
LDR R0, =0x1234 ; 将地址0x1234加载到寄存器R0
LDR R1, =0x5678 ; 将地址0x5678加载到寄存器R1
ADD R2, R0, R1 ; 将R0和R1的值相加,结果存储在R2
B .
END
```
- `AREA`声明了一个程序区域。
- `EXPORT`和`ENTRY`是汇编程序的入口点。
- `LDR`指令用于从内存中加载数据到寄存器。
- `ADD`指令执行加法操作。
在编写汇编程序时,需要考虑寄存器使用、内存对齐、栈操作等低级细节。此外,合理的注释能

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《Cortex M3 与 M4 权威指南(第 3 版)》是一本全面的指南,深入探讨了 Cortex-M3 和 M4 微控制器的核心差异、架构、功能和应用。专栏包含一系列文章,涵盖了从初学者指南到高级特性、编程教程、调试和测试实践、RTOS 集成、中断管理、工业控制应用、时钟系统、低功耗模式、性能优化和外设接口等各个方面。通过提供深入的见解、示例和最佳实践,该专栏为工程师和开发人员提供了在项目中有效选择、使用和优化 Cortex-M3 和 M4 微控制器的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
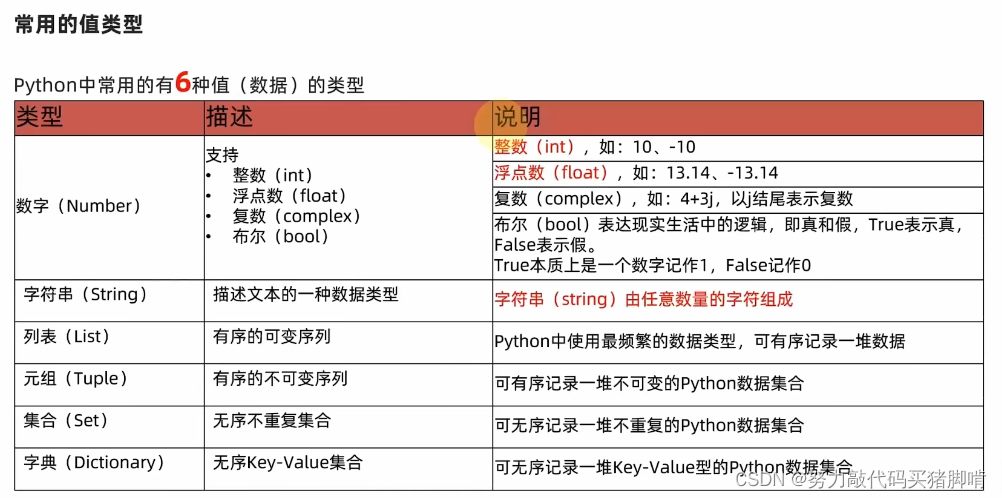
【Python编程精进路线图】:从新手到专家的完整指南
# 摘要
Python作为一种流行的编程语言,在初学者和专业开发者中得到了广泛的应用。本文旨在为读者提供从基础语法到高级编程技巧的全面教程。文章首先介绍Python的基础语法,包括数据类型、控制结构、函数以及面向对象编程的基础知识。接着,文中探讨了Python的高级编程技巧,如异常处理、模块和包管理以及文件和数据处理。在实践与项目开发章节中,文章详细阐述了Web开发、数据分析与可视化以及自动化脚本编写
【基恩士cv-x系列故障排查秘籍】:出库操作中的问题诊断与解决
# 摘要
本文针对基恩士cv-x系列的出库操作和故障排查进行了全面的概述和分析。首先介绍了故障排查的基本概念,然后详细阐述了基恩士cv-x系列出库操作的理论基础,包括出库流程解析、控制点以及可能遇到的问题类型。接着,本文提供了问题诊断的工具、方法和流程,以及针对软件故障、硬件故障和操作错误的具体解决策略。最后,强调了故障预防与维护的重要性,并通过实战案例分析总结出具体的故障解决步骤。本文旨在为基恩士cv-x系列用户和维护人员提供一套系统的出库操作指导和故障排查解决方案,提高设备运行的稳定性和效率。
# 关键字
基恩士cv-x系列;出库操作;故障排查;故障诊断;预防措施;维护策略
参考资源链
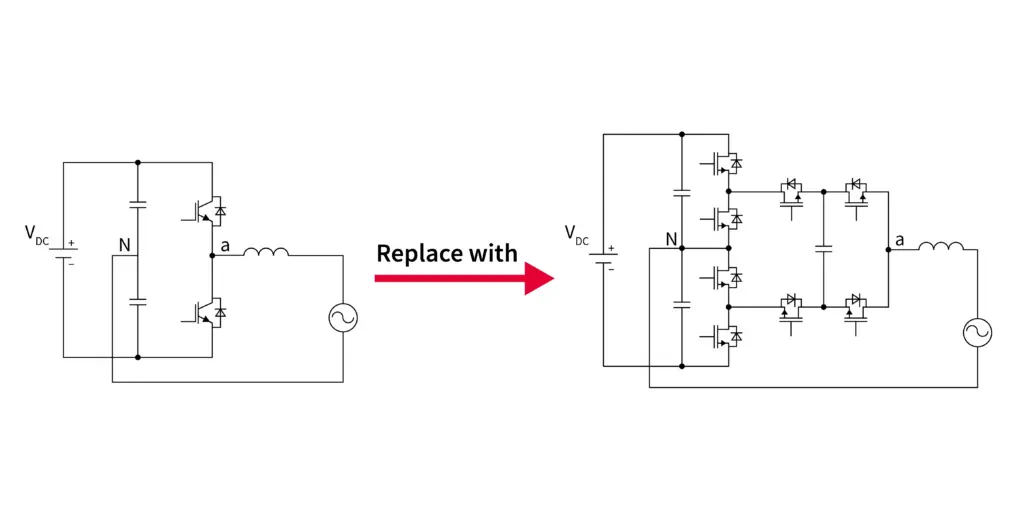
【风电系统整流技术】:六脉波与十二脉波整流器应用对比与选择
# 摘要
本文综述了风电系统中整流技术的应用,包括六脉波和十二脉波整流器的工作原理、技术特点及应用实例。通过对比分析,探讨了两种整流器在性能、成本和应用领域的差异,并提出了选择整流器时的决策过程和风险管理策略。案例研究与实证分析进一步验证了理论分析的可行性,提供了行业专家的视角和对未来发展的建议。本文旨在为风电系统的整流技术提供全面的技术分析和实用的决策支持。
# 关键字
风电
【子群发现技术】:揭秘如何识别社区结构
/i.s3.glbimg.com/v1/AUTH_08fbf48bc0524877943fe86e43087e7a/internal_photos/bs/2018/B/f/hyNZ42T72w5eQ2iWB4rg/captura-2018-10-04-15-26-57.png)
# 摘要
社区结构与子群发现技术是网络分析领域中的核心问题,它涉
【STM32WB固件更新挑战与解决方案】:优化流程,确保数据传输完整性

# 摘要
本文全面探讨了STM32WB微控制器的固件更新过程,从理论基础到实践操作,再到面临的挑战和未来发展趋势。首先,介绍了STM32WB的基本架构和固件更新机制的基本原理,以及常用固件更新协议和数据完整性的重要性。接着,详细阐述了固件更新的实践操作,
商业智能与数据可视化:CAP认证必过知识点的全方位解析

# 摘要
本文旨在全面概述商业智能(BI)与数据可视化,并详细探讨CAP认证的核心理论框架。文章首先介绍了商业智能和数据可视化的基本概念及其在商业决策中的应用,接着深入讲解数据仓库和数据湖的设计、构建与维护,以及数据模型的构建和多维分析技术。文章还着重讨论了CAP定理在数据管理领域的应用,并分析了各种商业智能工具的比较与应用。此外,文章深入探讨了数据治理的理论框架、数据质量的提升策略,以及
模拟登录与自动抢购:Autojs在双11活动中的实战应用

# 摘要
本文专注于Auto.js在Android平台上的自动化应用,从模拟登录到自动抢购,再到高级应用技巧的探讨,提供了全面的技术分析和实践指南。首先,分析了模拟登录的基本原理和实践步骤,着重于Android输入事件模拟机制和安全性考量。接着,探讨了自动抢购的策略分析、实践技巧以及性能优化。此外,本文还介绍了Auto.js在实现高级应用技巧中的事件监听
操作系统中电梯调度算法的并发问题分析(专家解读)

# 摘要
本文深入探讨了电梯调度算法及其并发控制策略,涵盖了算法的基本原理、并发编程基础、以及并发问题的类型、危害和控制策略。文章分析了多电梯协同作业及请求队列并发访问时可能出现的并发问题,并提出相应的改进策略。通过实验环境搭建、算法实现和性能评估,本文验
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )