Linux进程管理精讲:实战解读100道笔试题,提升作业控制能力
发布时间: 2024-12-23 15:23:27 阅读量: 5 订阅数: 3 

操作系统管理必备:Shell脚本语言精讲与实战指南
# 摘要
Linux进程管理是操作系统核心功能之一,对于系统性能和稳定性至关重要。本文全面概述了Linux进程管理的基本概念、生命周期、状态管理、优先级调整、调度策略、进程通信与同步机制以及资源监控与管理。通过深入探讨进程创建、终止、控制和优先级分配,本文揭示了进程管理在Linux系统中的核心作用。同时,文章也强调了系统资源监控和限制的工具与技巧,以及进程间通信与同步的实现,为系统管理员和开发者提供了有效的实践指导和技巧提升。最终,本文旨在通过实践题解析和作业控制技巧的讨论,增强用户对Linux进程管理知识的掌握和应用能力。
# 关键字
Linux;进程管理;生命周期;状态转换;通信同步;资源监控
参考资源链接:[Linux笔试必备:100道选择题及答案解析](https://wenku.csdn.net/doc/m4jy3x0ekq?spm=1055.2635.3001.10343)
# 1. Linux进程管理概述
## 1.1 Linux进程管理简介
在Linux操作系统中,进程管理是系统管理的核心组成部分。Linux通过进程调度器来分配CPU时间片,确保每个进程都能按序执行。进程管理不仅涉及进程的创建、执行和终止,还包括进程间通信、同步以及优先级和调度策略的管理。
## 1.2 进程与线程
进程是执行中的程序实例,拥有独立的地址空间、文件描述符、系统资源等。而线程是进程中的一条执行路径,线程共享进程的资源,可以更高效地实现并发。在Linux中,线程在内核中被当作轻量级进程来管理。
## 1.3 进程管理的重要性
良好的进程管理能够确保系统的稳定性和资源的有效利用。通过合理地管理进程的生命周期、优先级、调度以及资源限制,可以优化系统性能,避免资源耗尽和服务中断,是系统管理员和开发者必须掌握的技能之一。
为了进一步深入理解Linux进程管理,接下来我们将探讨进程的生命周期、状态管理以及创建和终止进程的方法。
# 2. 进程的生命周期和状态管理
### 2.1 进程状态的理解
#### 2.1.1 进程状态的分类
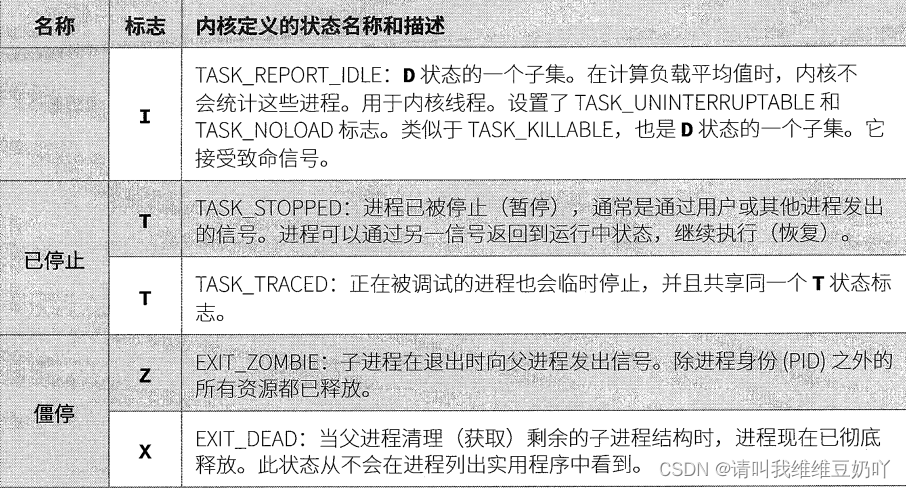
Linux进程状态反映了进程在特定时刻所处的生命周期阶段。进程主要可以分为以下几种状态:
- `运行(Running)`:进程正在CPU上执行。
- `可中断睡眠(Interruptible Sleep)`:进程等待某些条件或信号,例如等待输入/输出完成。
- `不可中断睡眠(Non-Interruptible Sleep)`:进程处于等待状态,如I/O阻塞,此时进程不会响应信号。
- `暂停(Paused)`:进程暂时停止运行,等待用户输入。
- `僵死(Zombie)`:进程已经结束,但其父进程尚未调用wait()来获取子进程的状态信息。
- `停止(Stopped)`:进程被信号停止。
每种状态都有其特定的场景和意义,系统会根据进程的行为和需求来动态调整其状态。
#### 2.1.2 进程状态转换图
为了更直观地了解进程状态之间的转换关系,我们可以使用以下的状态转换图来表示:
```mermaid
stateDiagram-v2
[*] --> NotRunning: 创建进程
NotRunning --> Running: 调度器选择
Running --> InterruptibleSleep: 等待I/O或其他条件
Running --> NonInterruptibleSleep: I/O操作
InterruptibleSleep --> Running: I/O完成或其他条件达成
NonInterruptibleSleep --> Running: I/O完成
Running --> Paused: 接收STOP信号
Paused --> Running: 接收CONT信号
Running --> Zombie: 正常或异常终止
Running --> Stopped: 接收STOP信号
Zombie --> [*]: 父进程调用wait()
Stopped --> Running: 接收CONT信号
Stopped --> [*]: 进程终止
```
该状态图简明地展示了进程在生命周期内的状态转换过程,有助于开发者理解进程管理和调试。
### 2.2 进程的创建和终止
#### 2.2.1 fork(), vfork() 和 exec()系列函数
在Linux中,进程创建主要使用fork()、vfork()和exec()系列函数。
- `fork()`:创建一个与当前进程几乎一模一样的新进程,称为子进程。父进程获得子进程的PID,而子进程获得0。
- `vfork()`:和fork()类似,但是不复制父进程的地址空间。这个函数用于创建子进程以执行exec()调用,常用于提高效率。
- `exec()`系列函数:在当前进程中替换为新的程序,子进程使用exec()系列函数来运行另一个程序。
```c
#include <stdio.h>
#include <unistd.h>
int main() {
pid_t pid = fork();
if (pid == 0) {
// 子进程代码
execlp("/bin/ls", "ls", NULL);
} else if (pid > 0) {
// 父进程代码
wait(NULL); // 等待子进程结束
}
return 0;
}
```
在上述代码中,创建了子进程,并在子进程中使用exec()系列函数来调用`ls`命令列出目录内容。
#### 2.2.2 进程终止的方法和时机
进程终止通常发生在以下几种情况:
- 正常终止:程序执行完毕,main函数返回或者调用exit()函数。
- 异常终止:接收到某些信号,如SIGTERM、SIGKILL。
- 调用exit()函数:在程序的任何地方显式调用,导致进程终止。
父进程通常负责回收子进程资源,使用wait()或waitpid()函数等待子进程结束,并获取子进程的退出状态。
### 2.3 作业控制命令的使用
#### 2.3.1 如何使用前台和后台控制作业
在Linux中,我们可以使用以下命令来控制作业在前台和后台之间的切换:
- `&`:将命令放入后台执行。
- `Ctrl + Z`:暂停当前前台进程并将其放入后台。
- `bg`:将后台作业置为运行状态。
- `fg`:将后台作业带到前台继续运行。
```bash
# 运行程序并放入后台
$ ./my_program &
# 将暂停的程序放到后台运行
$ bg
# 将后台程序带回前台运行
$ fg
```
#### 2.3.2 作业控制相关命令解析
Linux提供了多个与作业控制相关的命令,包括jobs、kill和disown等:
- `jobs`:列出当前会话中所有的后台作业。
- `kill`:向进程发送信号,可以用来终止进程。
- `disown`:从当前会话的作业列表中移除作业。
```bash
# 列出所有后台作业
$ jobs
# 终止作业
$ kill %1
# 从作业列表中移除作业
$ disown %2
```
通过这些命令,开发者可以有效地管理和控制程序运行,特别是在进行长时间运行的进程时,这种控制变得尤为重要。
在本章节中,我们详细探讨了进程的生命周期和状态管理,包括进程状态的概念、进程的创建与终止、作业控制命令的使用方法。了解这些知识点有助于IT从业者在Linux环境中高效地管理进程,优化程序运行效率。
# 3. 进程优先级和调度
## 3.1 进程优先级概念
进程优先级是操作系统决定进程获得CPU执行时间的重要因素。在Linux系统中,每个进程都有一个优先级,决定了它在竞争CPU资源时的优先顺序。了解进程优先级的概念以及如何调整它们,对于进行有效的系统性能优化至关重要。
### 3.1.1 nice值与优先级的关系
在Linux中,每个进程的优先级由两个部分决定:静态优先级和动态优先级。静态优先级是由系统管理员或者程序在创建进程时指定的,它是一个固定值,称为nice值。nice值的范围通常是从-20(最高优先级)到19(最低优先级)。动态优先级是系统基于进程行为动态调整的优先级,它会受到静态优先级的影响。
默认情况下,普通用户的进程nice值范围是0到19,而root用户可以创建任何范围内的nice值。需要注意的是,nice值并不是越高越好,而是越低表示优先级越高。即使进程的nice值较高,它仍然有获得CPU时间的机会,只是会比nice值低的进程机会少。
### 3.1.2 调整进程优先级的命令
在Linux中,`nice` 和 `renice` 命令用于调整进程优先级。`nice` 命令用于启动一个新进程并给它指定一个nice值,而 `renice` 命令用于改变已经运行的进程的nice值。
例如,要以nice值10启动一个新进程,可以使用如下命令:
```bash
nice -n 10 program
```
要改变一个已经运行的进程的nice值,首先需要知道该进程的PID(进程ID),然后使用 `renice` 命令:
```bash
renice -n 5 -p 12345
```
这个命令会将PID为12345的进程的nice值改变为5。
## 3.2 调度策略的理解
Linux支持多种进程调度策略,这些调度策略决定了进程如何被选择来运行在CPU上。理解这些策略以及它们的应用场景对于性能调优非常重要。
### 3.2.1 实时调度策略和分时调度策略
Linux提供了多种调度策略,包括实时(Real-Time,RT)和分时(Time-Sharing,TS)调度策略。
实时调度策略具有两种模式:`SCHED_FIFO`(先进先出)和`SCHED_RR`(轮转调度)。这两种模式都是为实时任务设计的,确保实时任务可以以确定性的方式及时执行。
分时调度策略是为普通进程设计的,其中最常用的是`SCHED_OTHER`。在这种模式下,进程根据其nice值获得不同的优先级,以及在运行时动态调整优先级。
### 3.2.2 调度策略的选择与影响
选择合适的调度策略和适当的nice值是优化系统性能的关键。例如,对于需要快速响应的实时应用,可以使用实时调度策略。对于日常使用的桌面系统或服务器,分时调度策略通常足够使用。
通过调整nice值和选择合适的调度策略,可以确保关键进程获得所需的资源,同时允许其他进程在较低优先级下运行。合理配置可以避免资源竞争,提高整体系统的响应性和吞吐量。
## 3.3 调度命令的深入使用
要深入理解进程优先级和调度,就必须熟练使用各种与调度相关的命令。
### 3.3.1 交互式命令:top, ps, htop等
交互式命令允许用户实时查看系统状态,并对进程进行管理。
`top` 命令是查看和管理进程最常用的工具,它提供了一个动态更新的进程列表,并显示了包括进程的nice值、CPU使用率等在内的多项指标。
```bash
top
```
`ps` 命令提供了在特定时间点查看进程状态的能力,可以使用如下参数显示进程的nice值:
```bash
ps -el
```
`htop` 是一个更高级的交互式进程查看器,它提供了更友好的用户界面和更多的信息显示,包括进程的树状视图和彩色编码。
```bash
htop
```
### 3.3.2 系统级命令:nice, renice等
系统级命令允许用户在进程创建和运行时对其进行优先级的调整。
- `nice` 命令在启动新进程时指定其nice值。
- `renice` 命令可以动态地调整已经运行的进程的nice值。
```bash
nice -n 15 command
```
```bash
renice -n -5 -p 2345
```
以上命令分别演示了如何启动一个nice值为15的新进程,以及如何将PID为2345的进程的nice值调整为-5。
通过这些命令和工具的深入使用,系统管理员和用户能够更有效地管理进程资源,提高系统的整体性能和响应能力。
# 4. 进程通信与同步
## 4.1 进程间通信IPC机制
### 4.1.1 管道、消息队列、共享内存、信号量和套接字
在多进程环境中,进程间通信(IPC)是必不可少的机制,它们提供了不同的方式来实现数据共享、同步和交换信息。每种IPC机制都有其特定的使用场景和优缺点。
- **管道(Pipes)**:是最传统的IPC机制,分为无名管道和命名管道。无名管道只能在有亲缘关系的进程间使用,而命名管道可以用于无亲缘关系的进程间。管道本质上是一个先进先出的队列,数据只能单向流动。
- **消息队列(Message Queues)**:允许不相关进程间传递格式化的数据块。消息队列是消息的链接列表,存储在内核中,并由消息队列标识符标识。消息队列允许多个进程读写消息,具有异步通信的特点。
- **共享内存(Shared Memory)**:允许多个进程共享内存区域。它是一种高效的IPC方式,因为它避免了数据在进程间的复制。共享内存允许一个或多个进程向内存区域写入数据,而其他进程则可以从该内存区域读取数据。
- **信号量(Semaphores)**:是一种用于进程间同步的计数器,通常用于控制对共享资源的访问。信号量可以用来实现互斥访问,也可以用于实现进程间的同步。
- **套接字(Sockets)**:提供了进程间通信的全双工连接,允许跨网络的通信。套接字可以用于同一台机器上的进程间通信,也可以用于不同机器上的进程间的通信。
为了选择适合的IPC机制,必须了解应用需求,是否需要数据同步,数据传输量的大小,以及是否需要跨网络通信等因素。
### 4.1.2 各种IPC机制的比较和应用场景
**管道与消息队列的比较**:管道适合于具有父子关系的进程间通信,而消息队列可以被不同的进程所使用。消息队列提供了更多的灵活性和异步通信的可能性。
**共享内存与管道的比较**:共享内存比管道有更高的传输速率,因为它直接在进程间共享数据。对于大量数据的交换,共享内存是更佳的选择。
**信号量的应用场景**:通常用作同步机制,例如在生产者-消费者模型中,信号量可以用来控制对缓冲区的访问。
**套接字的应用场景**:套接字适用于分布式系统中,尤其是在网络编程中。它允许在不同主机上的进程进行通信,提供了灵活性和强大的功能。
表 1 概述了各种IPC机制的比较:
| IPC机制 | 通信模式 | 数据大小 | 性能 | 使用场景 |
|---------|---------|----------|------|----------|
| 管道 | 单向数据流 | 小量数据 | 低 | 父子进程间通信 |
| 消息队列 | 格式化消息 | 适量数据 | 中 | 不同进程间通信 |
| 共享内存 | 直接内存访问 | 大量数据 | 高 | 多个进程间数据共享 |
| 信号量 | 计数器同步 | 无数据传输 | 中 | 进程同步和互斥 |
| 套接字 | 全双工连接 | 可变数据量 | 高 | 网络间进程通信 |
代码示例:
```c
// 以下代码展示了如何在C语言中使用系统V消息队列
#include <stdio.h>
#include <stdlib.h>
#include <sys/msg.h>
#include <sys/ipc.h>
// 定义消息结构体
struct my_msg {
long int msg_type;
char msg_text[100];
};
int main() {
key_t key = ftok("msgque", 65); // 生成键值
int msgid = msgget(key, 0666 | IPC_CREAT); // 创建消息队列
struct my_msg message; // 创建消息缓冲区
// 发送消息到队列
message.msg_type = 1;
strcpy(message.msg_text, "Hello there!");
msgsnd(msgid, &message, sizeof(message), 0);
// 接收消息
msgrcv(msgid, &message, sizeof(message), 1, IPC_NOWAIT);
printf("%s\n", message.msg_text);
// 销毁消息队列
msgctl(msgid, IPC_RMID, NULL);
return 0;
}
```
在上述代码中,我们创建了一个系统V消息队列,并发送了一个类型为1的消息到队列中,然后从队列中接收消息。代码逻辑是简单易懂的,且以IPC方式直接实现了进程间的通信。
### 4.2 进程同步的实现
#### 4.2.1 互斥锁、读写锁和条件变量
为了确保进程间正确地访问共享资源,避免竞争条件,需要使用同步机制。以下是最常见的同步机制:
- **互斥锁(Mutex)**:是最基本的同步机制。互斥锁确保同一时间只有一个进程可以访问资源。如果一个进程持有了锁,其他试图访问该资源的进程将被阻塞直到锁被释放。
- **读写锁(Read-Write Locks)**:允许多个读进程同时访问资源,但写进程则需要独占访问。适用于读操作远多于写操作的场景。
- **条件变量(Condition Variables)**:通常与互斥锁一起使用,允许进程在某个条件不满足时挂起执行,并在条件满足时被唤醒继续执行。
这些同步机制通过在进程间建立某种协作规则,确保共享资源的一致性和完整性。
#### 4.2.2 同步机制在进程间通信中的作用
进程间通信不仅需要考虑数据交换,还要确保数据的完整性和一致性。同步机制的作用就是在多个并发进程访问同一资源时,保证资源的正确使用。
- **互斥锁**能够保护共享资源,防止多个进程同时访问造成数据不一致。
- **读写锁**提供了一种平衡读操作和写操作性能的机制,优先考虑读操作的并发。
- **条件变量**允许进程在数据未就绪时等待,数据就绪后通过信号通知进程继续执行,这在生产者-消费者问题中非常有用。
同步机制的正确使用对于设计并发程序来说至关重要,它可以帮助避免死锁、饥饿和资源竞争等问题。
mermaid 流程图如下,描述了生产者消费者问题的解决方案,其中使用了互斥锁和条件变量:
```mermaid
graph LR
A[开始] --> B[消费者等待数据]
B --> C{是否有数据?}
C -->|是| D[消费数据]
D --> E[消费者通知生产者]
E --> B
C -->|否| F[生产者生产数据]
F --> G[生产者通知消费者]
G --> B
```
在生产者消费者模型中,消费者需要等待生产者提供数据,当生产者生产了数据后,消费者才能消费数据,反之亦然。互斥锁确保了对数据缓冲区的访问互斥,而条件变量用于进程间的同步,确保生产者在缓冲区满时等待,在缓冲区有空间时生产者被唤醒,反之亦然。
在设计高效、稳定、安全的多进程系统时,进程间通信和同步是核心的考虑因素。本章内容对各种IPC机制和同步方法进行了详细解释,旨在帮助读者理解和掌握它们的应用方式,以解决实际问题。
# 5. 系统资源监控与管理
## 5.1 系统资源监控工具
### 5.1.1 常用监控工具的使用
Linux系统提供了多种工具用于实时监控系统资源,这些工具包括top、vmstat、iostat等。它们各有特点,能够帮助运维人员诊断系统运行状况,优化性能,及时发现瓶颈。
**top命令** 是最常使用的系统监控工具之一,它能够显示系统中CPU、内存使用情况,并能够动态更新数据,展示当前系统中进程的实时状态。
```bash
top
```
在执行`top`命令后,可以通过特定的按键来控制展示的信息。例如:
- `P`:根据CPU使用率排序进程。
- `M`:根据内存使用率排序进程。
- `f`:添加或删除需要在top中显示的列。
**vmstat命令** 可以用来获取系统的虚拟内存、进程、CPU活动的信息。它显示的信息非常详细,适用于分析系统性能问题。
```bash
vmstat 1
```
上述命令表示每隔1秒刷新一次vmstat的信息,`1`代表刷新间隔的时间(单位为秒)。
**iostat命令** 主要用来查看CPU和磁盘I/O的统计信息,它提供了基于时间的系统利用率和I/O统计信息。
```bash
iostat -xz 1
```
这里,`-xz`参数表示以压缩格式展示详细报告,并且每秒刷新一次数据。
### 5.1.2 监控指标的解读和分析
在使用监控工具时,了解各项指标的含义至关重要,以下是一些核心监控指标的解读:
- **CPU利用率**:top和vmstat都能显示CPU的利用率,它反映了CPU的工作负载。一般情况下,平均负载不应超过CPU核心数的1.5倍。
- **内存使用情况**:top和vmstat能够显示物理内存和交换空间(swap)的使用情况,这对于诊断内存泄漏和内存过度使用的问题很有帮助。
- **I/O等待**:iostat可以显示磁盘I/O的等待时间和操作次数,通过这些数据可以判断磁盘是否成为了系统性能的瓶颈。
- **进程状态**:top命令中会展示不同状态的进程数量,比如运行中、睡眠中、停止和僵尸进程。通过这些数据,可以了解系统进程的健康状况。
### 5.1.3 交互式命令的使用技巧
系统监控工具中的交互式命令提供了很多方便的功能,比如top中的`k`命令可以杀死进程。
```bash
top
# 输入 k 后按照提示输入PID和信号(通常是15或者9)
```
这些交互式命令可以简化系统管理的工作,提高工作效率。
## 5.2 进程资源限制
### 5.2.1 ulimit命令的使用和限制
在Linux中,`ulimit`命令用于控制用户使用的资源上限,包括文件大小、CPU时间、最大进程数等。这对于控制用户进程消耗的系统资源非常有用,特别是在多用户环境中。
```bash
ulimit -a
```
执行上述命令可以查看当前用户的资源使用上限。通过`ulimit`设置的参数,可以限制用户进程对系统资源的过度使用。
```bash
ulimit -u 200
```
这条命令设置了用户可以启动的最大进程数为200,超出这个限制的进程将不会被创建。
### 5.2.2 cgroups在资源管理中的应用
**cgroups(控制组)** 是Linux内核的一个特性,它允许用户将进程分配到不同的分组中,并且限制、记录和隔离分组所使用的物理资源(如CPU、内存、磁盘I/O等)。
通过cgroups,系统管理员可以更精细地控制资源分配,实现资源的优先级分配和优先级控制,甚至可以为不同的应用程序或用户分配不同的资源配额。
```bash
# 创建一个新的cgroup
mkdir /sys/fs/cgroup/cpu/mygroup
# 将进程添加到cgroup中
echo <PID> > /sys/fs/cgroup/cpu/mygroup/tasks
# 配置cgroup的资源限制
echo <value> > /sys/fs/cgroup/cpu/mygroup/cpu.shares
```
这里,`cpu.shares`文件决定了cgroup中进程能获得的相对CPU时间比例。cgroups的使用有助于系统资源的合理分配和性能调优。
# 6. 实践题解析与作业控制技巧
## 6.1 笔试题分析方法
当面对一道涉及Linux进程管理的笔试题时,理解和分析题目的关键点是至关重要的。以下是分析和解答这类题目时可以采用的步骤:
### 6.1.1 题目解读步骤
首先,仔细阅读题目,理解它所涉及的概念和要求。注意关键术语和操作条件,比如是需要解释进程状态转换、描述进程间通信还是提出系统资源监控的策略。
接着,尝试将理论知识与实际场景相结合。比如,如果题目要求解释某个进程调度命令的工作原理,你可以先从基础概念入手,然后结合具体案例进行分析。
最后,注意题目的格式要求。有的题目可能需要你用流程图表示进程状态转换,或者使用伪代码描述某个系统调用的执行流程。
### 6.1.2 解题思路和技巧
在解答时,注意以下技巧:
- **分步骤阐述**:将解题过程拆分为几个步骤,每一步逻辑清晰,使得读者容易理解你的思路。
- **关键词突出**:关键术语要高亮或加粗,确保重点突出。
- **实例佐证**:用实例支撑理论,增强答案的说服力。
- **图表辅助**:合理使用图表,如mermaid流程图,直观展示进程状态转换或进程间通信的流程。
## 6.2 进程管理实战演练
要提高在Linux系统中的进程管理能力,实践是不可或缺的环节。接下来,让我们通过一个实际案例,演练如何进行作业控制和管理。
### 6.2.1 实际案例分析与操作
假设你需要在一个多用户环境中管理多个进程,用户A和用户B都在进行计算密集型任务。你的任务是优先保证用户A的进程获得更多的CPU资源。
首先,你需要检查当前系统中的所有进程状态,可以使用`ps`命令:
```bash
ps -e -o pid,comm,%cpu,%mem,cls --sort=-%cpu
```
这将列出所有进程并按照CPU使用率从高到低排序。然后,你可以识别出用户A和B的进程。
接下来,调整用户A进程的优先级,使用`renice`命令:
```bash
renice -n -5 -p <userA_process_pid>
```
这样可以增加用户A进程的优先级,让其获得更多的CPU时间。
### 6.2.2 提升作业控制能力的建议和技巧
为了提升你的作业控制能力,以下是一些建议:
- **熟悉系统工具**:熟练使用`top`, `ps`, `htop`, `nice`, `renice`等工具进行进程监控和控制。
- **编写脚本**:学会使用shell脚本来自动化进程管理任务,例如定期检查并优化进程优先级。
- **模拟实战**:在非生产环境中模拟各种场景,练习进程的创建、终止、优先级调整和作业控制。
- **学习文档和社区**:深入阅读官方文档,参与开源社区,了解不同Linux发行版下的进程管理最佳实践。
通过这些步骤,你将能够更加自信和有效地控制和优化Linux环境中的进程。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
深入浅出Java天气预报应用开发:零基础到项目框架搭建全攻略

# 摘要
Java作为一种流行的编程语言,在开发天气预报应用方面显示出强大的功能和灵活性。本文首先介绍了Java天气预报应用开发的基本概念和技术背景,随后深入探讨了Java基础语法和面向对象编程的核心理念,这些为实现天气预报应用提供了坚实的基础。接着,文章转向Java Web技术的应用,包括Servlet与JSP技术基础、前端技术集成和数据库交互技术。在
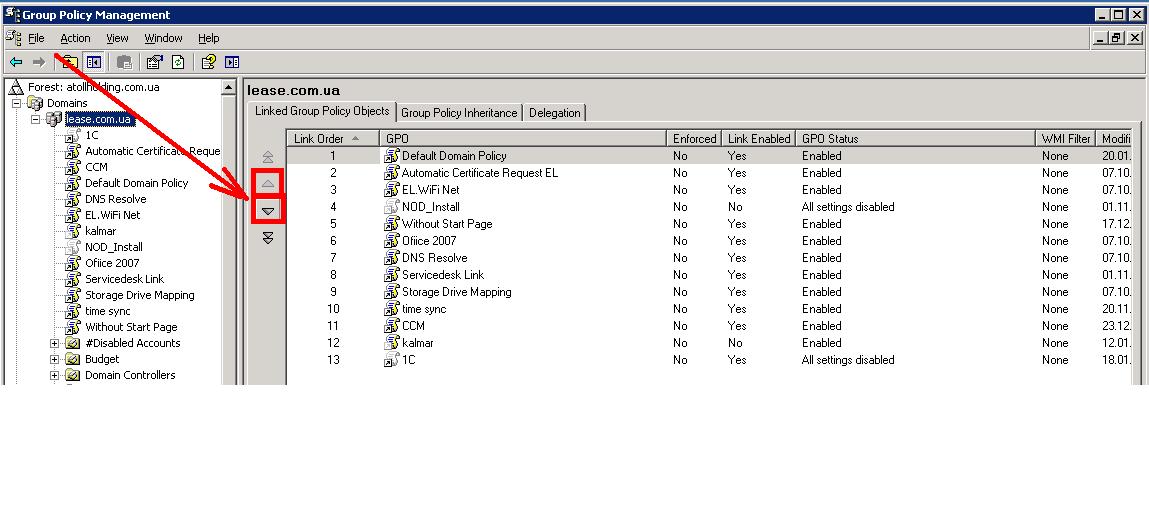
【GPO高级管理技巧】:提升域控制器策略的灵活性与效率
# 摘要
本论文全面介绍了组策略对象(GPO)的基本概念、策略设置、高级管理技巧、案例分析以及安全策略和自动化管理。GPO作为一种在Windows域环境中管理和应用策略的强大工具,广泛应用于用户配置、计算机配置、安全策略细化与管理、软件安装与维护。本文详细讲解了策略对象的链接与继承、WMI过滤器的使用以及GPO的版本控制与回滚策略,同时探讨了跨域策略同步、脚本增强策略灵活性以及故障排除与
高级CMOS电路设计:传输门创新应用的10个案例分析

# 摘要
本文全面介绍了CMOS电路设计基础,特别强调了传输门的结构、特性和在CMOS电路中的工作原理。文章深入探讨了传输门在高速数据传输、模拟开关应用、低功耗设计及特殊功能电路中的创新应用案例,以及设计优化面临的挑战,包括噪声抑制、热效应管理,以及传输门的可靠性分析。此外,本文展望了未来CMOS技术与传输门相结合的趋势,讨论了新型
计算机组成原理:指令集架构的演变与影响

# 摘要
本文综合论述了计算机组成原理及其与指令集架构的紧密关联。首先,介绍了指令集架构的基本概念、设计原则与分类,详细探讨了CISC、RISC架构特点及其在微架构和流水线技术方面的应用。接着,回顾了指令集架构的演变历程,比较了X86到X64的演进、RISC架构(如ARM、MIPS和PowerPC)的发展,以及SIMD指令集(例如AVX和NEON)的应用实例。文章进一步分析了指令集
KEPServerEX秘籍全集:掌握服务器配置与高级设置(最新版2018特性深度解析)
# 摘要
KEPServerEX作为一种广泛使用的工业通信服务器软件,为不同工业设备和应用程序之间的数据交换提供了强大的支持。本文从基础概述入手,详细介绍了KEPServerEX的安装流程和核心特性,包括实时数据采集与同步,以及对通讯协议和设备驱动的支持。接着,文章深入探讨了服务器的基本配置,安全性和性能优化的高级设
TSPL2批量打印与序列化大师课:自动化与效率的完美结合

# 摘要
TSPL2是一种广泛应用于打印和序列化领域的技术。本文从基础入门开始,详细探讨了TSPL2的批量打印技术、序列化技术以及自动化与效率提升技巧。通过分析TSPL2批量打印的原理与优势、打印命令与参数设置、脚本构建与调试等关键环节,本文旨在为读者提供深入理解和应用TSPL2技术的指
【3-8译码器构建秘籍】:零基础打造高效译码器

# 摘要
3-8译码器是一种广泛应用于数字逻辑电路中的电子组件,其功能是从三位二进制输入中解码出八种可能的输出状态。本文首先概述了3-8译码器的基本概念及其工作原理,并
EVCC协议源代码深度解析:Gridwiz代码优化与技巧
# 摘要
本文全面介绍了EVCC协议和Gridwiz代码的基础结构、设计模式、源代码优化技巧、实践应用分析以及进阶开发技巧。首先概述了EVCC协议和Gridwiz代码的基础知识,随后深入探讨了Gridwiz的架构设计、设计模式的应用、代码规范以及性能优化措施。在实践应用部分,文章分析了Gridwiz在不同场景下的应用和功能模块,提供了实际案例和故障诊断的详细讨论。此外,本文还探讨了
JFFS2源代码深度探究:数据结构与算法解析

# 摘要
JFFS2是一种广泛使用的闪存文件系统,设计用于嵌入式设备和固态存储。本文首先概述了JFFS2文件系统的基本概念和特点,然后深入分析其数据结构、关键算法、性能优化技术,并结合实际应用案例进行探讨。文中详细解读了JFFS2的节点类型、物理空间管理以及虚拟文件系统接口,阐述了其压
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )