卡尔曼滤波在IMU姿态解算中的实战应用:算法细节全解析
发布时间: 2024-12-26 08:14:28 阅读量: 11 订阅数: 19 

基于MATLAB的卡尔曼滤波(9轴)IMU数据-源码

# 摘要
本论文旨在探讨卡尔曼滤波技术在惯性测量单元(IMU)姿态解算中的应用及其理论基础。首先介绍了IMU传感器的工作原理及其在姿态估计中的关键作用,并阐述了不同的姿态表示方法。随后,详细解析了卡尔曼滤波算法的数学原理,包括线性和非线性模型,并讨论了其在IMU数据融合中的实现步骤和优化策略。实践应用部分着重于IMU数据的采集、预处理以及滤波器的设计和调试,并对姿态估计结果进行了评估。高级议题章节进一步探讨了动态系统的扩展、自适应卡尔曼滤波以及非线性滤波算法的应用。本文为相关领域的研究者和工程师提供了全面而深入的技术指南和实践参考。
# 关键字
卡尔曼滤波;IMU传感器;姿态解算;数据融合;状态估计;非线性模型
参考资源链接:[IMU姿态解算:加速度与角速度的融合算法](https://wenku.csdn.net/doc/3k34y9u4ru?spm=1055.2635.3001.10343)
# 1. 卡尔曼滤波在IMU姿态解算中的理论基础
在现代导航和机器人领域中,IMU(惯性测量单元)的姿态解算是一项关键技术,而卡尔曼滤波算法在这一过程中起着至关重要的作用。卡尔曼滤波是一种高效的递归滤波器,它能够从一系列含有噪声的测量中估计动态系统的状态。这种算法在处理IMU数据时,可以有效地融合来自加速度计、陀螺仪和磁力计的多源信息,提高姿态估计的准确性。
卡尔曼滤波之所以被广泛应用于IMU姿态解算,是因为它能够实时地根据测量数据更新状态估计,并提供估计误差的协方差,从而对估计值进行最优调整。这一过程涉及两个基本步骤:预测和更新。在预测阶段,滤波器使用系统的动态模型预测下一时刻的状态;在更新阶段,则利用新的测量数据来校正预测值。这种基于模型的预测和基于数据的更新,使得卡尔曼滤波算法能够适应IMU数据在真实世界中遇到的各种动态和噪声干扰。
在本章中,我们将首先探讨卡尔曼滤波的基本概念和数学原理,为理解其在IMU姿态解算中的应用奠定理论基础。随后,我们将逐步深入到IMU传感器的工作原理,以及如何将卡尔曼滤波与IMU传感器数据融合起来,进行精确的姿态估计。通过对这些基础知识的学习,读者将能够更深刻地理解卡尔曼滤波在姿态解算中的作用,以及如何在实际应用中优化算法性能。
# 2. IMU传感器及其在姿态估计中的作用
### 2.1 IMU传感器的工作原理与分类
IMU(Inertial Measurement Unit,惯性测量单元)是用于测量和报告速度、方向和重力作用的设备。它通常包含加速度计、陀螺仪和磁力计三种传感器。了解它们的工作原理与分类是深入研究姿态估计的前提。
#### 2.1.1 加速度计、陀螺仪和磁力计的功能与原理
**加速度计**
加速度计可以测量物体沿特定方向上的加速度,通常使用压电或电容式传感技术。它基于惯性力原理,即当物体静止或做匀速直线运动时,测量到的加速度是由于地球的重力加速度。而当物体做非匀速运动时,加速度计则能检测到由于运动状态改变所产生的加速度。
```mermaid
flowchart LR
A[物体] -->|移动| B[测量加速度]
B --> C[分析运动状态]
```
**陀螺仪**
陀螺仪的原理是基于角动量守恒。当对陀螺仪的转子施加旋转时,它会持续旋转,测量转子旋转轴的方向变化(角速度)。现代的MEMS(微电子机械系统)陀螺仪通常使用振动质量的谐振频率变化来检测角速度。
**磁力计**
磁力计则用于测量地球磁场强度的分量,从而提供关于设备相对于地磁北的方向信息。磁力计工作原理基于霍尔效应或感应磁阻效应,它能感知并转换磁场强度为电信号。
#### 2.1.2 IMU传感器的性能指标及其影响
IMU传感器的性能指标包括量程、灵敏度、误差稳定性等。量程定义了传感器能测量的最大和最小值。灵敏度是指传感器输出信号与输入量的比率,而误差稳定性影响传感器输出信号的可靠性。性能指标决定了传感器在特定环境中的适用性,如高动态范围的运动场景中对高速高精度需求。
### 2.2 IMU姿态解算的基本概念
IMU姿态解算的目标是确定一个物体在三维空间中的方向和位置。
#### 2.2.1 姿态表示方法:欧拉角、四元数和旋转矩阵
**欧拉角**
欧拉角(如俯仰角、滚转角、偏航角)是描述物体姿态最直观的方法,其优点是易于理解和应用。然而,当描述多轴旋转时,存在万向锁问题,可能导致计算不准确。
**四元数**
四元数是一种在三维空间中描述旋转的数学工具,它能够有效地解决万向锁问题,并且可以避免欧拉角中可能出现的奇异性。四元数包含一个实部和三个虚部,表示旋转的轴和角度。
**旋转矩阵**
旋转矩阵是3x3的正交矩阵,能够表示三维空间中物体的旋转。它们在表示复合旋转时非常有用,但计算成本较高,且存在数值稳定性问题。
```mathematica
R = | R11 R12 R13 |
| R21 R22 R23 |
| R31 R32 R33 |
```
#### 2.2.2 IMU数据的融合问题和解决方案概述
IMU数据融合是指结合多个传感器的数据以获得更准确的姿态信息。常见的解决方案有卡尔曼滤波、粒子滤波、互补滤波等。每种方法都试图解决传感器数据的噪声和偏差问题。
```mermaid
flowchart TD
A[加速度计数据] -->|融合| B[陀螺仪数据]
B -->|结合| C[磁力计数据]
C -->|卡尔曼滤波| D[优化的姿态估计]
```
卡尔曼滤波在融合IMU数据时特别有用,因为它不仅考虑了当前的测量值,还考虑了前一状态的估计值和其不确定性,通过一系列预测和更新步骤,提供了一个估计的姿态和误差协方差,用于进一步的优化姿态解算。
# 3. 卡尔曼滤波算法详解
### 3.1 卡尔曼滤波的数学原理
卡尔曼滤波是一种高效的递归滤波器,它能够从一系列的含有噪声的测量中,估计动态系统的状态。其核心在于通过预测和更新两个步骤,对系统的状态进行最优估计。
#### 3.1.1 状态估计与误差协方差的更新规则
状态估计的关键在于如何利用模型和实际测量数据来确定系统的最优状态。卡尔曼滤波器采用一个递归过程来实现这一目的。在每个时间步,滤波器将执行两个主要步骤:预测(Predict)和更新(Update)。
**预测步骤**:根据系统动态模型来预测下一个状态,这通常包括状态向量的预测和误差协方差矩阵的预测。预测过程可以表示为:
\[ \hat{x}_{k|k-1} = A_k \hat{x}_{k-1|k-1} + B_k u_k \]
\[ P_{k|k-1} = A_k P_{k-1|k-1} A_k^T + Q_k \]
其中,\(\hat{x}_{k|k-1}\) 是在给定之前步骤测量信息下的状态预测,\(P_{k|k-1}\) 是预测误差协方差,\(A_k\) 是系统矩阵,\(B_k\) 是控制输入矩阵,\(u_k\) 是控制输入,\(Q_k\) 是过程噪声协方差矩阵。
**更新步骤**:利用新的测量值对预测状态进行

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了 IMU(惯性测量单元)组合姿态解算的方方面面,提供了一系列实用技巧和深入分析,以帮助工程师提升传感器融合的准确性和稳定性。从 IMU 数据预处理、标定到卡尔曼滤波和四元数方法,专栏涵盖了姿态解算的各个方面。此外,还探讨了加速度计和陀螺仪融合、误差分析、磁场传感器应用、动态环境下的挑战以及低功耗和实时性能优化等主题。通过结合算法和硬件方面的见解,本专栏为工程师提供了在各种应用中实现高精度 IMU 姿态解算所需的全面指南,包括自动驾驶、空间探索、机器人技术和运动捕捉系统。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【MySQL InnoDB数据恢复专家教程】:全面解析数据恢复的10个必要步骤
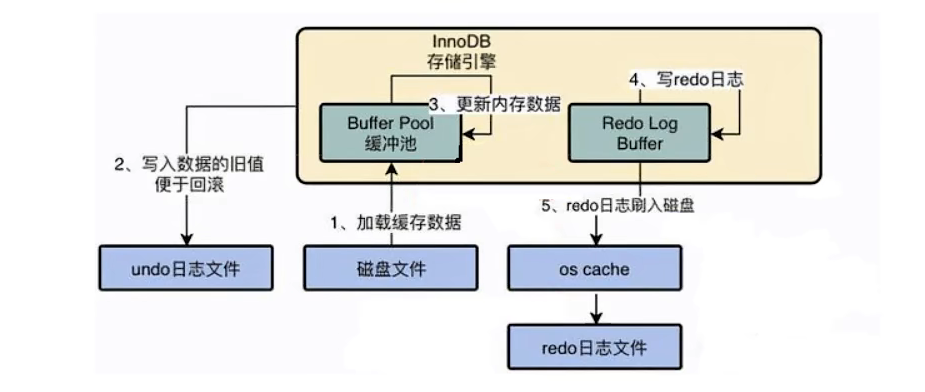
# 摘要
随着信息技术的迅速发展,数据库的稳定性与数据安全性变得尤为重要。本文全面介绍了MySQL InnoDB存储引擎的数据恢复过程,从基础知识到恢复前的准备工作,再到具体的数据恢复方法和步骤。首先阐述了InnoDB存储引擎的结构、事务和锁机制,然后讨论了在数据损坏和系统故障等不同情况下应做的准备工作和备份的重要性。接着,本文详细说
流式处理速成课:设计高效流处理架构的5个实战技巧

# 摘要
流式处理作为一种新兴的数据处理范式,已经成为实时分析和大数据处理的重要技
MySQL基础精讲:5个步骤搞定数据库设计与SQL语句

# 摘要
本文旨在深入介绍MySQL数据库系统的各个方面,包括其基本概念、安装过程、数据库和表的设计管理、SQL语言的基础及进阶技巧和优化,以及MySQL的高级应用。文中首先提供了MySQL的简介和安装指南,随后详细探讨了数据库和表的设计原则,包括规范化理论、逻辑结构设计以及表的创
深入探索AAPL协议:苹果配件开发进阶必备知识
# 摘要
AAPL协议作为一套为特定领域设计的通信标准,其在功能实现、安全性和与其他系统集成方面表现出色。本文首先概述了AAPL协议的基本概念和理论基础,解析了协议的层次结构、核心组件以及数据封装与传输机制。随后,重点介绍了AAPL协议在开发实践中的应用,包括开发环境的搭建、编程接口的使用以
【光模块发射电路全攻略】:彻底掌握设计、测试、优化到故障排除
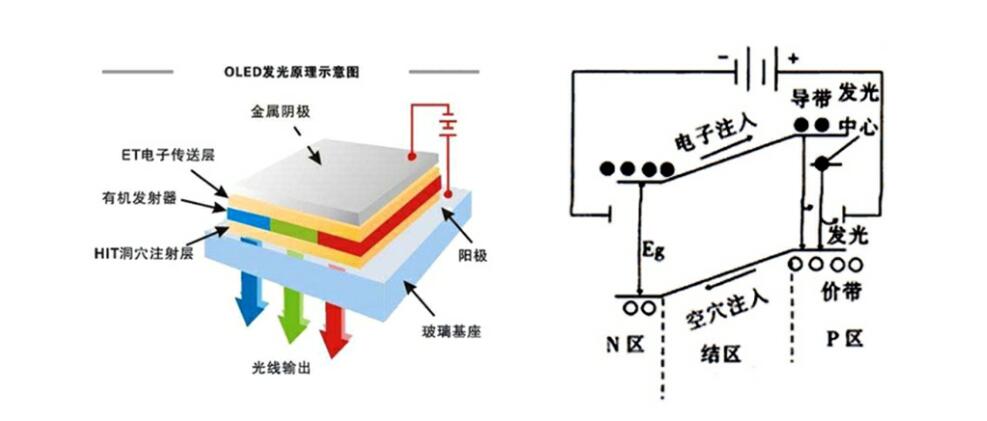
# 摘要
光模块发射电路的设计对于高速数据通信系统的性能和可靠性至关重要。本文首先概述了光模块发射电路设计的基础,涵盖了光通信的理论基础、关键组件选择及技术原理。接着,文章深入探讨了设计实践过程中的注意事项、仿真分析方法以及原型制作和测试。此外,本文还着重分析了电路优化技术与故障排除方法,并对光模块发射电路未来的发展趋势进行了展望,包括新技术的应用前景、行业标准的重
【SIM卡故障诊断手册】:专业IT人士的必备工具
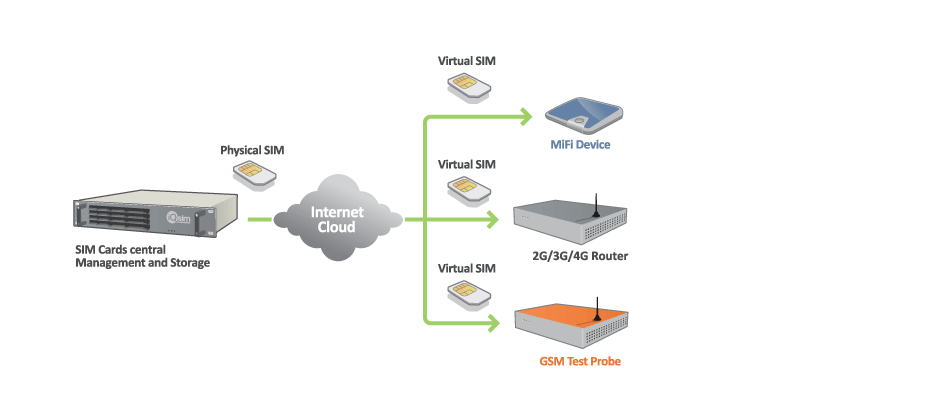
# 摘要
SIM卡是现代通信设备不可或缺的组成部分,其稳定性和安全性对移动通信至关重要。本文全面概述了SIM卡故障诊断的基础知识,深入分析了硬件和软件层面的故障原因,探讨了故障诊断工具和维护技巧。通过对SIM卡物理结构、供电要求、操作系统、应用程序故障的详细讨论,以及对常见故障排除技巧的介绍,本文旨在为行业人员提供一套实用的故障诊断和维护指南。最后,本文展望了SI
红外遥控信号捕获与解码入门:快速上手技巧

# 摘要
红外遥控技术作为一种无线通信手段,在家用电器和消费电子产品中广泛应用。本文首先介绍了红外遥控信号捕获与解码的基础知识,然后深入探讨了红外通信的理论基础,包括红外光的物理特性和红外遥控的工作模式,以及红外遥控信号的编码方式如脉冲编码调制(PCM)和载波频率。文章接着讨论了红外遥控信号捕获所
【性能调优】:Web后台响应速度提升的关键步骤

# 摘要
随着Web应用对性能要求的不断提升,后台性能调优成为保证用户体验和系统稳定性的关键。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )