Python Serial库配置秘籍:实现高效串行通信的5大步骤
发布时间: 2024-10-14 04:55:46 阅读量: 100 订阅数: 25 
# 1. Python Serial库概述
Python Serial库是一个用于进行串行通信的库,它提供了一套简单易用的API,使得开发者能够方便地通过Python进行串行通信。Serial库可以用于各种串行设备,如GPS模块、蓝牙设备、Arduino和其他微控制器等。
Serial库的核心功能是提供一个接口,使得Python代码能够打开串行端口,配置串行通信参数(如波特率、数据位、停止位和校验位),发送和接收数据。Serial库支持各种操作系统,包括Windows、Linux和Mac OS X,并且兼容Python 2和Python 3。
Serial库的安装非常简单,可以通过Python的包管理器pip进行安装。安装后,开发者可以轻松地进行串行通信,无需深入了解底层的串行通信协议。Serial库广泛应用于嵌入式系统开发、自动化测试、数据采集等领域,是Python开发者的强大工具之一。
# 2. 配置Serial库的理论基础
## 2.1 串行通信的基本概念
### 2.1.1 串行通信的工作原理
串行通信是一种常见的数据传输方式,它通过单个通道按顺序传输数据位。在串行通信中,数据是按位顺序发送的,通常是在发送和接收设备之间通过一个或多个信号线进行传输。每个数据位的传输都需要一定的时间,这被称为波特率。
在串行通信中,数据的发送方会将数据位分成小组,称为“帧”。每个帧通常包含一个起始位,一个或多个数据位,一个可选的奇偶校验位,以及一个停止位。起始位表示数据帧的开始,数据位包含实际的信息,校验位用于错误检测,而停止位表示数据帧的结束。
### 2.1.2 串行通信的常见参数
串行通信的一些关键参数包括波特率、数据位、停止位和校验位。
- **波特率**:数据传输速率的度量,表示每秒传输的位数。常见的波特率有9600、19200、38400等。
- **数据位**:每个数据帧中的数据位数,常见的有7位或8位。
- **停止位**:用来标识一个数据帧的结束,常见的有1位、1.5位或2位。
- **校验位**:用于错误检测,可以是奇校验或偶校验。
## 2.2 Serial库的工作原理
### 2.2.1 库的结构和功能
Serial库是一个Python模块,用于处理串行通信。它提供了一个简单的接口,允许Python脚本与串行端口进行交互。Serial库的工作原理是通过封装底层的串行通信操作,为用户提供了一个高级的API来发送和接收数据。
Serial库的基本结构包括以下几个部分:
- **配置接口**:允许用户设置串行端口的参数,如波特率、数据位、停止位和校验位。
- **打开/关闭接口**:用于打开和关闭串行端口的连接。
- **发送/接收接口**:用于发送数据和接收来自串行端口的数据。
- **事件处理**:允许用户注册回调函数来处理特定事件,如接收到数据或连接状态改变。
### 2.2.2 库支持的设备类型
Serial库支持多种类型的串行设备,包括但不限于:
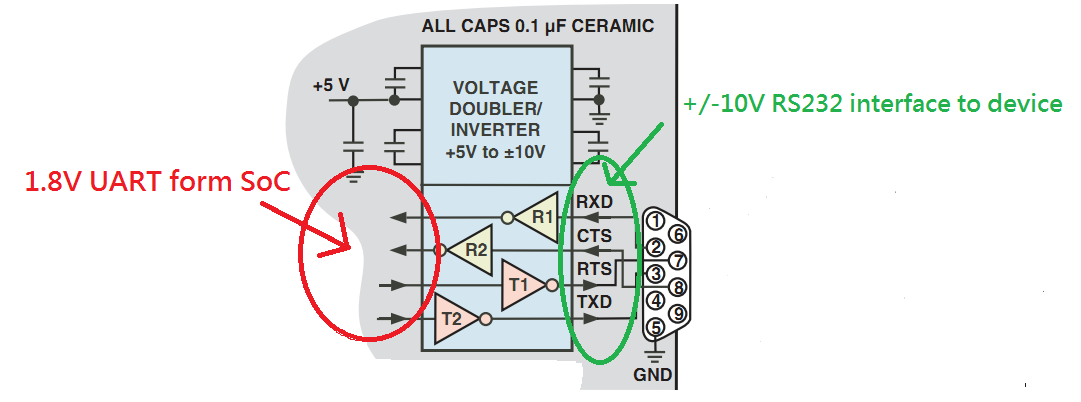
- **RS-232**:这是一种常见的串行通信标准,用于连接计算机与外部设备。
- **RS-485**:这是一种差分信号的串行通信标准,支持更远距离的通信。
- **USB转串行适配器**:将USB接口转换为串行接口,用于连接不支持USB通信的设备。
## 2.3 选择合适的串行端口
### 2.3.1 端口的类型和选择标准
选择合适的串行端口是串行通信的关键步骤。端口类型通常由设备的物理接口和通信协议决定。常见的串行端口类型包括:
- **物理串行端口**:如RS-232、RS-485等,通常需要物理连接。
- **USB转串行端口**:通过USB接口模拟串行端口,支持即插即用。
- **虚拟串行端口**:在软件层面上模拟串行端口,适用于网络通信。
选择标准包括:
- **兼容性**:确保所选端口与目标设备兼容。
- **距离**:考虑通信距离,例如RS-485支持更远的通信距离。
- **速率**:根据数据传输速率要求选择合适的波特率。
### 2.3.2 端口的连接与检测
在连接串行端口之前,需要确认设备的串行端口类型和参数设置。连接步骤通常包括:
1. **确定端口参数**:波特率、数据位、停止位、校验位等。
2. **物理连接**:将设备的串行端口与计算机或网络适配器连接。
3. **软件配置**:使用Serial库配置串行端口参数。
4. **测试连接**:发送和接收测试数据,验证连接是否成功。
以下是一个使用Serial库连接串行端口的示例代码:
```python
import serial
import time
# 创建串行端口对象
ser = serial.Serial(
port='/dev/ttyUSB0', # 串行端口名,Windows下为'COM3'
baudrate=9600, # 波特率
bytesize=8, # 数据位
parity='N', # 校验位,无校验位
stopbits=1 # 停止位
)
# 检查端口是否打开
if not ser.is_open:
print("Failed to open port!")
else:
print("Port opened successfully.")
ser.close() # 关闭串行端口
```
在本章节中,我们介绍了串行通信的基本概念,Serial库的工作原理,以及如何选择和连接合适的串行端口。接下来的章节将详细介绍Serial库的安装与配置,以及如何在Python中进行串行通信的编程实践。
# 3. Serial库的安装与配置
在本章节中,我们将深入探讨如何安装和配置Python Serial库,这是进行串行通信的基础步骤。我们将从安装Serial库开始,然后介绍如何配置其基本参数,最后讨论一些高级配置选项。
## 3.1 安装Serial库
### 3.1.1 使用pip安装
安装Serial库最简单的方法是使用Python的包管理工具pip。打开命令行工具,输入以下命令:
```bash
pip install pyserial
```
这条命令会从Python包索引(PyPI)下载并安装最新版本的Serial库。安装完成后,你可以通过Python解释器检查是否安装成功:
```python
import serial
print(ser)
```
如果系统输出了Serial模块的相关信息,那么说明安装已经成功。
### 3.1.2 源码安装和环境依赖
如果你需要安装特定版本的Serial库,或者想要从源代码安装,可以先从GitHub仓库克隆源代码,然后手动安装。以下是源码安装的步骤:
```bash
git clone ***
```
在进行源码安装之前,需要确保已经安装了Python环境以及`setuptools`模块。如果你使用的是Python 3,可能需要安装`pip3`,并且使用`pip3`来执行上述命令。
### 3.1.3 环境依赖分析
Serial库依赖于一些系统级的库,比如libserialport或pycparser。这些依赖在使用pip安装时通常会自动处理。但是,在某些情况下,你可能需要手动安装它们,尤其是在Linux系统上。例如,在Ubuntu系统上,你可以使用以下命令来安装这些依赖:
```bash
sudo apt-get install python3-setuptools python3-dev libffi-dev libssl-dev
```
## 3.2 配置Serial库的基本参数
### 3.2.1 波特率的设置
波特率是串行通信中的一个关键参数,它决定了数据传输的速率。在Serial库中,波特率通过`baudrate`参数设置。以下是一个设置波特率的示例:
```python
import serial
ser = serial.Serial(port='COM3', baudrate=9600)
```
在这个例子中,我们打开了COM3端口,并将波特率设置为9600。波特率的选择取决于你要通信的设备和协议的要求。
### 3.2.2 数据位、停止位和校验位的配置
除了波特率,串行通信还涉及到数据位、停止位和校验位的设置。这些参数可以通过`bytesize`、`stopbits`和`parity`参数进行配置。以下是一个配置这些参数的示例:
```python
ser = serial.Serial(
port='COM3',
baudrate=9600,
bytesize=serial.EIGHTBITS,
stopbits=serial.STOPBITS_ONE,
parity=serial.PARITY_NONE
)
```
在这个例子中,我们设置了8个数据位,1个停止位,无校验位。这些设置应该与你要通信的设备保持一致。
## 3.3 高级配置选项
### 3.3.1 超时设置
在某些情况下,你可能希望设置串行通信的超时时间。超时设置可以通过`timeout`参数实现,它决定了读取操作等待数据的时间。以下是一个设置超时的示例:
```python
ser = serial.Serial(port='COM3', timeout=2)
```
在这个例子中,我们设置了读取操作的超时时间为2秒。
### 3.3.2 缓冲区大小的调整
Serial库使用内部缓冲区来存储接收到的数据。你可以通过`rxsize`和`txsize`参数来调整接收和发送缓冲区的大小。以下是一个调整缓冲区大小的示例:
```python
ser = serial.Serial(
port='COM3',
rxsize=1024,
txsize=1024
)
```
在这个例子中,我们将接收和发送缓冲区的大小都设置为1024字节。
### 3.3.3 配置参数详细解释
在配置Serial库时,你需要根据实际应用场景来调整参数。例如,如果你的通信设备传输速率很快,你可能需要增大缓冲区大小以避免数据丢失。如果你的应用需要高可靠性,可能需要调整超时设置,以确保长时间无响应时能够及时处理错误。
在本章节中,我们介绍了Serial库的安装和配置方法,包括使用pip安装、源码安装以及环境依赖的处理。此外,我们还详细讲解了如何设置基本参数,如波特率、数据位、停止位和校验位,以及如何调整高级配置选项,如超时设置和缓冲区大小。这些知识将为后续的编程实践和高级应用案例打下坚实的基础。
# 4. Serial库的编程实践
在本章节中,我们将深入探讨如何使用Python的Serial库进行串行通信的编程实践。我们将首先学习如何发送和接收数据,然后讨论异常处理和调试技巧,最后探索多线程和多端口通信的应用。
## 4.1 数据的发送与接收
### 4.1.1 字符串和字节的发送
在串行通信中,数据通常以字节的形式进行传输。使用Python的Serial库,我们可以很容易地将字符串转换为字节,并发送到串行端口。以下是一个简单的例子,展示了如何发送字符串数据:
```python
import serial
import time
# 打开串行端口
ser = serial.Serial('/dev/ttyUSB0', 9600, timeout=1)
try:
# 确保串行端口已打开
if ser.isOpen():
# 将字符串转换为字节
message = 'Hello, Serial Port!'.encode('utf-8')
# 发送数据
ser.write(message)
# 等待一段时间,以便接收端处理数据
time.sleep(1)
finally:
# 关闭串行端口
ser.close()
```
### 4.1.2 数据接收和处理
接收数据是串行通信的另一个重要方面。Serial库提供了读取数据的方法,可以读取指定数量的字节或者等待直到接收缓冲区中有数据为止。以下是一个接收数据的例子:
```python
# 打开串行端口
ser = serial.Serial('/dev/ttyUSB0', 9600, timeout=1)
try:
# 确保串行端口已打开
if ser.isOpen():
# 读取一行数据
line = ser.readline()
# 解码为字符串
decoded_line = line.decode('utf-8').strip()
# 打印接收到的数据
print(f'Received: {decoded_line}')
finally:
# 关闭串行端口
ser.close()
```
在上面的例子中,我们使用`readline()`方法读取一行数据,这是一个阻塞调用,会等待直到数据到来。`decode()`方法用于将接收到的字节数据解码为字符串。
### 4.1.3 接收数据的完整流程
接收数据的过程通常包括打开串行端口、配置接收参数、循环读取数据、处理数据以及关闭串行端口等步骤。以下是一个完整的接收数据流程示例:
```python
import serial
# 打开串行端口
ser = serial.Serial('/dev/ttyUSB0', 9600, timeout=1)
try:
# 确保串行端口已打开
if ser.isOpen():
# 循环读取数据
while True:
line = ser.readline()
if line:
# 解码为字符串
decoded_line = line.decode('utf-8').strip()
# 打印接收到的数据
print(f'Received: {decoded_line}')
finally:
# 关闭串行端口
ser.close()
```
### 4.1.4 数据处理
接收到的数据通常需要进行一些处理才能被应用程序使用。例如,可能需要将接收到的字节数据转换为特定的数据格式,或者解析为某种数据结构。以下是一个处理接收到的数据的例子,我们将接收到的数据转换为整数:
```python
import serial
# 打开串行端口
ser = serial.Serial('/dev/ttyUSB0', 9600, timeout=1)
try:
# 确保串行端口已打开
if ser.isOpen():
# 循环读取数据
while True:
line = ser.readline()
if line:
# 解码为字符串
decoded_line = line.decode('utf-8').strip()
# 将字符串转换为整数
number = int(decoded_line)
# 打印接收到的整数
print(f'Received number: {number}')
finally:
# 关闭串行端口
ser.close()
```
### 4.1.5 数据发送和接收的流程图
以下是使用Serial库进行数据发送和接收的流程图:
```mermaid
graph LR
A[开始] --> B{打开串行端口}
B --> C{发送数据}
C --> D{关闭串行端口}
B --> E{接收数据}
E --> F{处理数据}
F --> G[结束]
```
### 4.1.6 数据发送和接收的表格
| 步骤 | 描述 |
| --- | --- |
| 打开串行端口 | 使用`serial.Serial()`函数打开串行端口 |
| 发送数据 | 使用`ser.write()`方法发送数据 |
| 接收数据 | 使用`ser.readline()`或`ser.read()`方法接收数据 |
| 处理数据 | 根据需要将接收到的数据转换为字符串、整数等格式 |
| 关闭串行端口 | 使用`ser.close()`方法关闭串行端口 |
## 4.2 异常处理和调试
### 4.2.1 常见的串行通信错误
在串行通信中,可能会遇到各种错误,例如连接失败、数据丢失、格式错误等。Serial库提供了一些异常处理机制来帮助我们处理这些错误。以下是一些常见的串行通信错误及其处理方法:
- `PortNotOpenError`:当尝试在未打开的串行端口上进行操作时抛出。通常,我们需要在操作前检查端口是否已打开。
- `Timeout`:当操作超时时抛出。可以通过设置超时时间来避免这个问题。
- `SerialException`:串行通信中发生的一些未分类的错误。
### 4.2.2 错误处理和日志记录
为了有效地调试和记录串行通信过程中的错误,我们可以使用Python的异常处理机制和日志记录模块。以下是一个错误处理和日志记录的例子:
```python
import serial
import logging
# 配置日志记录
logging.basicConfig(level=***)
def send_data(port_name, data):
try:
# 打开串行端口
ser = serial.Serial(port_name, 9600, timeout=1)
ser.write(data.encode('utf-8'))
***(f'Sent data: {data}')
except serial.SerialException as e:
# 处理串行通信错误
logging.error(f'Error: {e}')
finally:
# 关闭串行端口
ser.close()
def receive_data(port_name):
try:
# 打开串行端口
ser = serial.Serial(port_name, 9600, timeout=1)
while True:
line = ser.readline()
if line:
# 处理接收到的数据
***(f'Received data: {line.decode("utf-8").strip()}')
except serial.SerialException as e:
# 处理串行通信错误
logging.error(f'Error: {e}')
finally:
# 关闭串行端口
ser.close()
# 使用函数发送和接收数据
send_data('/dev/ttyUSB0', 'Hello, Serial Port!')
receive_data('/dev/ttyUSB0')
```
### 4.2.3 异常处理和日志记录的流程图
以下是使用异常处理和日志记录进行串行通信的流程图:
```mermaid
graph LR
A[开始] --> B{尝试打开串行端口}
B --> C{发送或接收数据}
C --> D{异常处理}
D --> E{记录日志}
E --> F{关闭串行端口}
```
### 4.2.4 异常处理和日志记录的表格
| 步骤 | 描述 |
| --- | --- |
| 打开串行端口 | 尝试打开串行端口并进行配置 |
| 发送或接收数据 | 发送或接收数据 |
| 异常处理 | 使用`try-except`块捕获和处理异常 |
| 记录日志 | 使用日志记录模块记录操作过程中的信息和错误 |
| 关闭串行端口 | 使用`finally`块确保关闭串行端口 |
## 4.3 多线程和多端口通信
### 4.3.1 多线程的基本概念和应用
多线程是一种允许程序同时执行多个线程的技术,每个线程可以执行不同的任务。在串行通信中,多线程可以用来同时处理多个串行端口的数据。Python的`threading`模块提供了创建和管理线程的功能。
### 4.3.2 多端口通信的实现和管理
要实现多端口通信,我们可以为每个串行端口创建一个线程,并在这些线程中分别处理数据的发送和接收。以下是一个简单的例子,展示了如何使用多线程同时处理两个串行端口:
```python
import serial
import threading
import logging
# 配置日志记录
logging.basicConfig(level=***)
def handle_serial_port(port_name):
try:
# 打开串行端口
ser = serial.Serial(port_name, 9600, timeout=1)
while True:
line = ser.readline()
if line:
# 处理接收到的数据
***(f'Received data from {port_name}: {line.decode("utf-8").strip()}')
except serial.SerialException as e:
# 处理串行通信错误
logging.error(f'Error on {port_name}: {e}')
finally:
# 关闭串行端口
ser.close()
# 创建线程
thread1 = threading.Thread(target=handle_serial_port, args=('/dev/ttyUSB0',))
thread2 = threading.Thread(target=handle_serial_port, args=('/dev/ttyUSB1',))
# 启动线程
thread1.start()
thread2.start()
# 等待线程完成
thread1.join()
thread2.join()
```
### 4.3.3 多端口通信的流程图
以下是使用多线程进行多端口通信的流程图:
```mermaid
graph LR
A[开始] --> B{创建线程}
B --> C{启动线程}
C --> D{线程运行}
D --> E{关闭串行端口}
E --> F[结束]
```
### 4.3.4 多端口通信的表格
| 步骤 | 描述 |
| --- | --- |
| 创建线程 | 创建一个或多个线程,每个线程负责一个串行端口 |
| 启动线程 | 启动所有创建的线程 |
| 线程运行 | 线程运行,处理各自串行端口的数据 |
| 关闭串行端口 | 在线程结束前关闭所有串行端口 |
| 结束 | 所有线程结束,程序完成 |
通过本章节的介绍,我们了解了如何使用Python的Serial库进行串行通信的编程实践,包括数据的发送与接收、异常处理和调试、以及多线程和多端口通信的实现。这些知识将帮助我们构建更复杂的串行通信应用。
# 5. Serial库高级应用案例
在前面的章节中,我们已经了解了Serial库的基本概念、安装配置以及基本的编程实践。在这一章中,我们将深入探讨Serial库的高级应用案例,包括实现设备间的自定义通信协议、串行数据采集系统以及远程串行通信应用。这些案例将展示Serial库在实际工作中的强大功能和灵活性。
## 5.1 实现设备间的自定义通信协议
在许多工业应用中,需要设备之间进行精确的通信。这就要求我们不仅要了解Serial库的基本使用,还要能够设计和实现自定义的通信协议。以下是一些关键点:
### 5.1.1 协议设计要点
- **头部和尾部标识**:通信协议通常需要有明确的开始和结束标识,以便接收方能够准确地识别消息的边界。
- **数据长度**:包括消息的总长度或者数据部分的长度,有助于接收方验证数据的完整性。
- **校验码**:用于检测数据在传输过程中是否发生错误,常用的是CRC校验。
- **地址和命令**:用于指定消息的目的地和执行的操作,确保消息能够正确地路由和执行。
- **数据格式**:定义数据的组织方式,例如字节顺序(大端或小端)、数据类型等。
### 5.1.2 协议的编码和解码实现
在Python中,我们可以使用struct库来编码和解码数据。以下是一个简单的例子:
```python
import struct
# 定义协议格式
protocol_format = '<BBH' # 假设协议由1字节命令、1字节地址、2字节数据长度组成
# 编码示例
command = 0x01
address = 0x0A
data_length = 0x0005
data = b'hello'
# 打包数据
packed_data = struct.pack(protocol_format, command, address, data_length) + data
# 解码示例
def decode_packet(packed_data):
command, address, data_length = struct.unpack(protocol_format, packed_data[:struct.calcsize(protocol_format)])
data = packed_data[struct.calcsize(protocol_format):struct.calcsize(protocol_format) + data_length]
return command, address, data_length, data
# 发送和接收数据
# 这里可以使用Serial库的write()和read()方法
```
## 5.2 串行数据采集系统
串行数据采集系统是工业自动化和科研领域中常见的应用。一个高效的数据采集系统需要精心设计其架构,并选择合适的策略来处理和存储采集到的数据。
### 5.2.1 数据采集系统的架构设计
一个基本的数据采集系统的架构可能包括以下几个部分:
- **数据采集节点**:负责从传感器或设备采集数据。
- **中央控制器**:接收来自各个节点的数据,并进行初步处理。
- **数据存储**:将处理后的数据存储起来,可以是本地数据库或云存储服务。
- **用户界面**:允许用户查看、分析和管理采集到的数据。
### 5.2.2 数据处理和存储策略
数据处理可以包括以下步骤:
- **数据清洗**:去除噪声和异常值。
- **数据转换**:将原始数据转换为更有用的格式,例如时间序列。
- **数据聚合**:将多个数据点聚合为统计信息。
数据存储策略可能涉及:
- **实时存储**:对于需要实时监控的数据,可以使用高速数据库或内存数据库。
- **长期存储**:对于历史数据,可以使用关系型数据库或分布式存储系统,如Hadoop。
## 5.3 远程串行通信应用
随着物联网和远程监控技术的发展,远程串行通信变得越来越重要。它允许用户通过网络远程访问和控制串行设备。
### 5.3.1 网络转发和数据加密
网络转发可以通过代理服务器或者使用VPN实现。数据加密可以使用SSL/TLS等加密协议来保证数据传输的安全性。
### 5.3.2 实现远程调试和监控
远程调试和监控通常涉及以下步骤:
- **远程访问**:使用SSH或远程桌面协议连接到远程设备。
- **串行端口转发**:将本地串行端口映射到远程设备的串行端口。
- **监控工具**:使用专业的监控工具或脚本来实时查看和记录串行通信数据。
通过这些高级应用案例,我们可以看到Serial库不仅仅是一个简单的串行通信工具,它还可以用于设计复杂的数据通信系统。无论是在自定义通信协议的实现、数据采集系统的构建,还是在远程通信应用的实现上,Serial库都提供了强大的支持。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 Python Serial 库学习专栏!本专栏将深入探讨 Serial 库,它是一个强大的 Python 工具,用于建立与串行设备的通信。通过一系列全面的文章,您将掌握串行通信的各个方面,包括:
* 关键技巧:了解串行通信的原理,并掌握 10 个关键技巧,以有效地使用 Serial 库。
* 应用技巧:探索 Serial 库在嵌入式系统中的 7 种应用,了解其在现实世界中的实用性。
* 数据处理:学习如何发送和解析复杂数据包,掌握数据处理的技巧。
* 安全指南:了解如何保护您的数据传输,并遵循 Serial 库的全面安全指南。
* 性能优化:通过 5 种方法提升数据传输速度,优化 Serial 库的性能。
* 多线程编程:实现并行串行通信,了解 Serial 库与多线程编程的 10 个技巧。
* 自定义协议:打造高效的通信协议,掌握 Serial 库自定义协议的 8 个步骤。
* 异步 IO 处理:提升通信效率,探索 Serial 库的异步 IO 处理方法。
* 事件驱动编程:构建响应式串行通信应用,了解 Serial 库的事件驱动编程技巧。
* 调试工具和方法:深入分析通信问题,掌握 Serial 库的 7 种调试策略。
* 物联网应用:从理论到实践,了解 Serial 库在物联网项目中的 8 个应用步骤。
* 加密通信:保证数据传输安全性,掌握 Serial 库与加密通信的最佳实践。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【跨模块协同效应】:SAP MM与PP结合优化库存管理的5大策略

# 摘要
本文旨在探讨SAP MM(物料管理)和PP(生产计划)模块在库存管理中的核心应用与协同策略。首先介绍了库存管理的基础理论,重点阐述了SAP MM模块在材料管理和库存控制方面的作用,以及PP模块如何与库存管理紧密结合实现生产计划的优化。接着,文章分析了SAP MM与PP结合的协同策略,包括集成供应链管理和需求驱动的库存管理方法,以减少库存
【接口保护与电源管理】:RS232通信接口的维护与优化
# 摘要
本文全面探讨了RS232通信接口的设计、保护策略、电源管理和优化实践。首先,概述了RS232的基本概念和电气特性,包括电压标准和物理连接方式。随后,文章详细分析了接口的保护措施,如静电和过电压防护、物理防护以及软件层面的错误检测机制。此外,探讨了电源管理技术,包括低功耗设计和远程通信设备的案例
零基础Pycharm教程:如何添加Pypi以外的源和库

# 摘要
Pycharm作为一款流行的Python集成开发环境(IDE),为开发人员提供了丰富的功能以提升工作效率和项目管理能力。本文从初识Pycharm开始,详细介绍了环境配置、自定义源与库安装、项目实战应用以及高级功能的使用技巧。通过系统地讲解Pycharm的安装、界面布局、版本控制集成,以及如何添加第三方源和手动安装第三方库,本文旨在帮助读者全面掌握Pycharm的使用,特
【ArcEngine进阶攻略】:实现高级功能与地图管理(专业技能提升)

# 摘要
本文深入介绍了ArcEngine的基本应用、地图管理与编辑、空间分析功能、网络和数据管理以及高级功能应用。首先,本文概述了ArcEngine的介绍和基础使用,然后详细探讨了地图管理和编辑的关键操作,如图层管理、高级编辑和样式设置。接着,文章着重分析了空间分析的基础理论和实际应用,包括缓冲区分析和网络分析。在此基础上,文章继续阐述了网络和数据库的基本操作
【VTK跨平台部署】:确保高性能与兼容性的秘诀

# 摘要
本文详细探讨了VTK(Visualization Toolkit)跨平台部署的关键方面。首先概述了VTK的基本架构和渲染引擎,然后分析了在不同操作系统间进行部署时面临的挑战和优势。接着,本文提供了一系列跨平台部署策略,包括环境准备、依赖管理、编译和优化以及应用分发。此外,通过高级跨平台功能的
函数内联的权衡:编译器优化的利与弊全解
# 摘要
函数内联是编译技术中的一个优化手段,通过将函数调用替换为函数体本身来减少函数调用的开销,并有可能提高程序的执行效率。本文从基础理论到实践应用,全面介绍了函数内联的概念、工作机制以及与程序性能之间的关系。通过分析不同编译器的内联机制和优化选项,本文进一步探讨了函数内联在简单和复杂场景下的实际应用案例。同时,文章也对函数内联带来的优势和潜在风险进行了权衡分析,并给出了相关的优化技
【数据处理差异揭秘】

# 摘要
数据处理是一个涵盖从数据收集到数据分析和应用的广泛领域,对于支持决策过程和知识发现至关重要。本文综述了数据处理的基本概念和理论基础,并探讨了数据处理中的传统与现代技术手段。文章还分析了数据处理在实践应用中的工具和案例,尤其关注了金融与医疗健康行业中的数据处理实践。此外,本文展望了数据处理的未来趋势,包括人工智能、大数据、云计算、边缘计算和区块链技术如何塑造数据处理的未来。通过对数据治理和
C++安全编程:防范ASCII文件操作中的3个主要安全陷阱

# 摘要
本文全面介绍了C++安全编程的核心概念、ASCII文件操作基础以及面临的主要安全陷阱,并提供了一系列实用的安全编程实践指导。文章首先概述C++安全编程的重要性,随后深入探讨ASCII文件与二进制文件的区别、C++文件I/O操作原理和标准库中的文件处理方法。接着,重点分析了C++安全编程中的缓冲区溢出、格式化字符串漏洞和字符编码问题,提出相应的防范
时间序列自回归移动平均模型(ARMA)综合攻略:与S命令的完美结合
# 摘要
时间序列分析是理解和预测数据序列变化的关键技术,在多个领域如金融、环境科学和行为经济学中具有广泛的应用。本文首先介绍了时间序列分析的基础知识,特别是自回归移动平均(ARMA)模型的定义、组件和理论架构。随后,详细探讨了ARMA模型参数的估计、选择标准、模型平稳性检验,以及S命令语言在实现ARMA模型中的应用和案例分析。进一步,本文探讨了季节性ARMA模
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )